
Projet Robot de combat MakerFight
Sommaire
I) Contexte et définition du projet
1) Contexte (p3)
2) Objectifs de notre groupe (p3)
3) Périmètre du projet (p4)
4) Critères d’acceptabilité (p4)
II) Besoins du robot (p5)
III) Contraintes
1)Coûts (p6)
2) Délais (p6)
3) Autres (p6)
IV) Déroulement du projet
1) Planification (p7)
V) Journée MakerFight et préparation
I)Contexte et définition de projet
- Contexte
Le MakerFight est un événement créé il y a 3 ans permettant de réunir des intéressés de la robotique, de la mécanique et de l’électronique afin de faire concourir des robots de combat en les faisant s’affronter dans une arène.
La première édition du MakerFight était privée mais cette année, celle-ci est ouverte a tous ceux qui veulent y présenter un robot de combat. Cet événement se déroulera cette année le Samedi 21 avril.
2) Objectifs de notre groupe
Pour cet événement, notre groupe se fixe plusieurs objectifs :
- Avoir à la date du 21 avril, un robot permettant de concourir.
- Contrôler le robot à distance
- Faire fonctionner tous les moteurs
- Remporter des matchs
3)Périmètre du projet :
Pour le bon fonctionnement de notre projet, notre groupe de quatre membres (TOUSSAINT Raphaëlle,KIEFFER Maxime, HUSSER Valentin et JUND Bastien) avons dû nous fixer des limites pour notre projet :
- Le règlement du MakerFight (Masse, types d’armes)
- Notre budget de 200€
- Le temps imparti pour notre projet
- La faisabilité technique
4)Critères à respecter :
Pour valider notre robot, et ainsi lui permettre de concourir, nous avons dû soumettre notre robot a plusieurs règles :
Les armes interdites :
-Explosifs
-Liquide
-Êtres vivants
-Projectiles
-Décharges électrique
Autres contraintes :
-Masse : 20 kg maximum avec une marge de 100 grammes
-Contrôle du robot à distance (sans fil)
-Nécessite un dispositif de sécurité en dehors de l’arène
II)Besoins du robot
| N° | Fonction | Critères | Priorité | Flexibilité |
| FP1 | Doit se déplacer sans problèmes dans l’arène |
-roues -taille |
Haute | Temps de réaction variable |
| FP2 | Doit respecter les contraintes imposées |
-Poids -Armes -Budget |
Haute | Poids : +100g |
| FP3 | Doit utiliser les armes à disposition |
-scie -bèche |
Haute | / |
| FC1 | Fournir une documentation | Site des projets | Moyenne | Date remise doc |
| FC2 | Etre transporter en sécurité | Protection plastique | Haute | / |
| FC3 | Préparation évènement MakerFight | Entrainement contrôles | Faible | / |
III)Contraintes
1)Coûts
Le budget accordé à notre projet est de 5O € par personne, soit un total de 200 €. Un peu moins de la moitié de notre budget a été dépensé pour acheter des batteries et environ 50€ ont été dépensé pour des cartes électroniques.
Pour réaliser notre projet, nous avons pu bénéficier de l’aide de Mr.DeSabbata , ainsi qu’un accès à l’IUT Lab , ou nous avons pu utiliser les logiciels tel que CorelDraw ou différentes machines, ce qui nous as permit d’économiser de l’argent et du temps.
2)Délais
Le délai final pour notre robot est la date du MakerFight, c’est-à-dire le 21 avril 2018. Depuis le début de notre projet, nous avons assister à plusieurs réunions (en Novembre et en Février), permettant de mettre au point l’avancement de notre robot.
3)Autres
En termes de contraintes, nous avons dû nous renseigner sur les différentes règles du MakerFight, ainsi que sur les mesures de sécurité à prendre concernant la protection des armes en dehors de l’arène, afin d’éviter tout risques.
Nous avons aussi dû prendre en compte le délai imposé par l’IUT pour l’achat de nos différents composants, pour la gestion de notre budget. Le fait de travailler sur le robot uniquement en dehors des heures de cours est aussi une contrainte en plus.
IV)Déroulement du projet
Depuis le début de notre projet, nous sommes passés par plusieurs phases :
-Phase de recherches : formes du robot, type d’armes, idées …
Durant cette premiere phase, nous avons tout d’abord fait quelques réunions afin de décider de la taille et de la forme finale du robot. Nous avons aussi commencé a imaginé
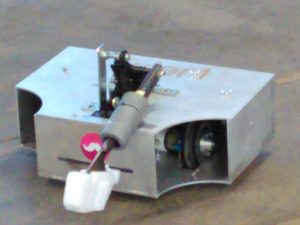
les différentes armes de notre robot ainsi que son moyen de déplacement. Nous en somme arrivés a la conclusion que notre robot sera rectangulaire et possédera comme armes :
-une scie
-une bêche coupée en deux
-Deux bras a l’avant


-Phase de conception :
Lors de cette deuxième phase , nous avons commencé a faire des tests pour réaliser une maquette de notre robot, ainsi que ses plans . Pour cela nous avons utilisé différents logiciels tels que CorelDraw et Solidworks. Cette phase s’est étendue jusqu’au dernier jour car il comporte aussi la partie programmation sous Arduino qui fut un véritable casse-tête


-Phase de récupération : matériaux, moteurs, recherche partenariat
Cette phase ci fut l’une des plus longues car nous devions recherché tous les matériaux nécessaire a la fabrication de notre robot. Pendant plusieurs mois, nous avons recherché des moteurs de perceuses pour faire fonctionner les roues , un moteur de ventilateur de moteur de voiture pour notre scie , des moteurs de lève-vitre pour les bras du robot ainsi qu’un moteur d’essuie glace pour notre bêche. Nous avons réussis a en trouver une grosse partie en demandant à des casses automobiles et les moteurs de perceuse en demandant dans notre entourage. Pour le châssis , nous avons obtenus un partenariat avec un métallurgiste du nom de John Steel qui nous a gracieusement offerts les plaques pour notre châssis en échange d’un peu de visibilité.

-Phase d’assemblage : fixation et modification moteurs
Durant cette phase , nous avons du modifier certains moteurs pour les adapter a notre robots :
-moteurs des roues :
Nous avons modifié le moteur de tel sorte qu’il soit plus résistant et moins limité dans ses capacités ; nous avons remplacé l’étage de pignons en plastique qui entraîne le moteur par des pignons en métal et nous avons enlevé le limiteur de couple pour éviter que les roues soient limitées en vitesse , donc en maniabilité.
-moteur de bêche
Pour celui-ci , nous n’avons pas eu besoin de modifier la moteur .En revanche , nous avons du fixer un bras à la bêche et percer un trou de la bonne taille dans ce meme bras afin de l’emboiter dans l’axe du moteur
-moteur de scie
Encore une fois , nous n’avons pas eu besoin de modifier le moteur mais nous avons du récupérer l’axe d’un moteur de meuleuse. Nous avons usiné la pièce et permis ainsi d’entraîner notre scie sans que cette dernière puisse sortir de son axe.

V) Journée Makerfight et préparation
Malgré que la nuit fût courte, nous étions remonté à bloc (malgré le stress) pour cette journée, lors de notre arrivée, il nous restait un certains nombre de test à faire:
-Vérifier que les roues fonctionnait correctement, la bêche ainsi que la scie.
-Prendre en main la maniabilité du robot
Arriva le moment temps redouté par tous les robots de la pesé ainsi que des tirages aux sorts pour les groupes:
Tout se déroulait correctement jusqu’à notre premier combat aux alentours de 10h45, nous affrontions le redoutable Sweetie Bot, la première manche fût remporté par lui, lors de celle-ci notre scie, monté à l’envers se dévissa et nous ne pouvions donc utiliser que la bèche, malgré celà nous remportons la deuxième manche avant de nous incliner sur la troisième manche.
Après le combat, ce fût une véritable course:
-Remonter la scie à l’endroit.
-Le pont en H de la bèche était HS.
Pas de répis, il fallait tout réparer avant le deuxième combat face à Schbunk, un adversaire redoutable.
Arrive donc le moment fatidique : Le combat contre Schbunk.
La première manche fût totalement en son sens.
La deuxième manche, nous arrivons à accrocher cette manche avant une troisième qui promettait d’être très mouvementé.
Mais, lors de la deuxième manche, une de nos roues avaient cessé de fonctionner, la dernière manche promettait d’être compliqué, mais, malgré ça, le robot s’est bien défendu !
Il avait maintenant, quelques blessures de « guerres », et avait survécu.
Comme le combat précédent, il était de notre devoir de le remettre sur roues pour qu’il puisse continuer à concourir.
La suite des matchs, se fût malheureusement sur deux roues (fautes aux pont en H).
Malgré ça, le robot s’est bien défendu et cette journée fût affolante et excitante à vivre!
Une expérience à refaire!