Notre projet consiste a améliorer une cafetière connectée (Interface + boitier). L’interface affichera plusieurs informations qui faciliterons beaucoup de choses a l’utilisateur. Notamment, le nombre de café pris, par jour ou par an, la consommation électrique, journalière et annuelle, ainsi que l’état de l’alimentation de la cafetière. Cependant, le boitier nous permettra de couvrir l’interface ainsi que les fils qui lient la Raspberry au capteur et a la cafetière.
La vie est trop courte pour continuer a boire du mauvais café.
Charles-maurice De Talleyrand-périgord
Points a améliorer :
L’interface :
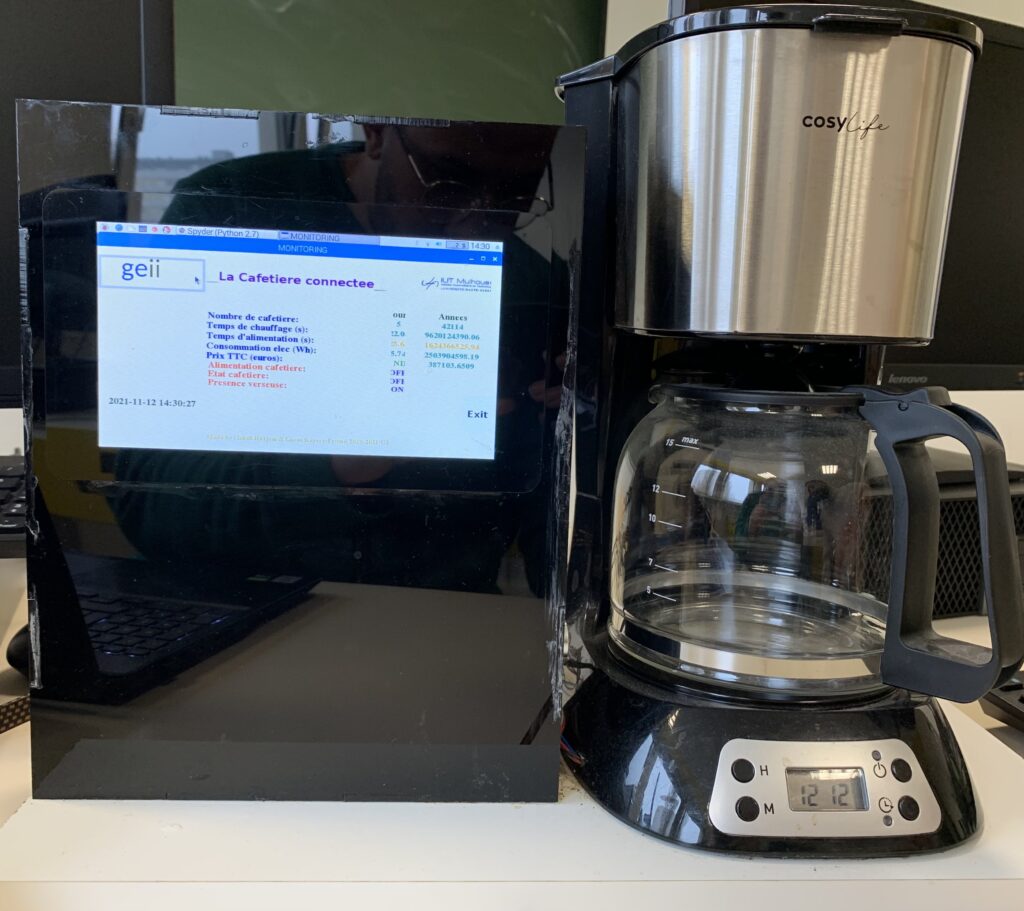
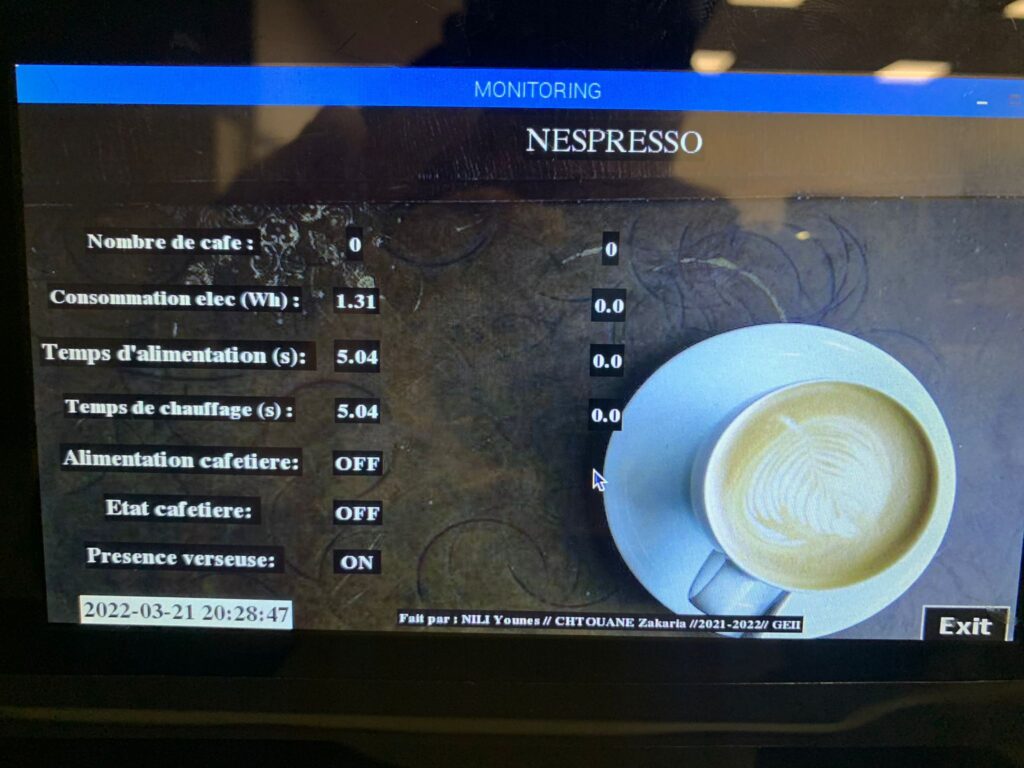
On devait améliorer l’esthétique de l’interface et corriger les valeurs qui s’y affichaient, notamment, la consommation électrique, le temps d’alimentation ainsi que le temps de chauffage.
L’alimentation :
On devait aussi mettre une unique alimentation a l’ensemble des composants électriques (Raspberry + Cafetière).
Solutions mises en œuvre :
Partie programmation :
On a utiliser le logiciel « Spyder » et la bibliothèque « Tkinter » qui est une bibliothèque graphique libre d’origine pour le langage Python et qui permet la création d’interfaces graphiques.
Logo TkinterL’interface
Nombre de café
Consommation électrique
Temps d’alimentation
Le nombre de café consommé.
Le nombre de Watt consommée par la cafetière.
Le temps où la cafetière est allumée.
Temps de chauffage
Alimentation de la cafetière
Etat de la cafetière
Le temps où la cafetière chauffe.
Si la cafetière est allumée ou pas : ON / OFF
Si la cafetière est branché a la prise ou pas : ON / OFF
Partie conception :
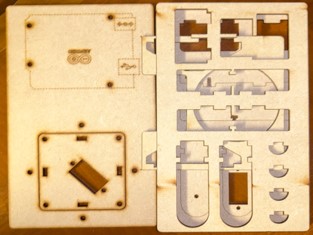
Le logiciel « CorelDraw » qui est un logiciel de dessin virtuel nous a permis de faire le boitier en 3D.
Boitier et interface
Conclusion
Ce projet nous a permis de travailler en équipe pour réaliser les différentes tâches et les mettre en œuvre pour finaliser le projet.
Nous tenons a remercier comme il se doit Mr. Verrier, Mr. Bazeille et Mr. Al Assaad pour leurs soutien et leurs apport de connaissance qui nous a énormément aidé à mener à bien ce projet, et Mr. DE SABBATA pour l’aide à l’IUT-Lab lors de la réalisation du boitier.
Notre projet de deuxième année de DUT GEII était d’améliorer une table interactif qui avait été commencer par d’anciens élèves de GEII. Notre travail sur cette table était de rendre simple et logique son lancement ainsi que son utilisation pour optimiser au maximum les sensations du ou des joueurs. Pour se faire, nous avons dus nous penchés sur plusieurs parties : la partie programmation, la partie technique, ainsi que l’aspect visuelle et la simplicité d’utilisation.
2 ) Problèmes rencontrés :
Partie esthétique :
Pour la partie esthétique et technique nous devions rendre la table plus jolie et faciliter le transport de celle-ci.
Partie programmation :
Le but du projet était de programmer un jeu du nom de « PONG ». Ce jeu est l’un des premier jeux vidéo d’arcade. « Développé par Allan Alcorn à partir de novembre 1972. »
3 ) Solutions apportés :
Partie esthétique :
Nous devions rendre le lancement du jeu plus esthétique et plus intuitif, donc, pour ce faire nous avons mis en place plusieurs menus :
Menu pour choisir le nombre de joueurs.
Menu pour choisir le niveau de difficulté.
Menu pour choisir le score maximum.
Partie programmation :
Pour rendre notre projet plus intéressant, on a dû créer plusieurs programmes pour pouvoir gérer toutes les fenêtres de jeu.
Programme « 1vs1 » : Jouer contre un ami.
Programme « 1vsIA » ; Jouer contre l’intelligence artificielle.
Programme « Choix difficulté » : Pour choisir le niveau de difficulté (Facile, Moyen, Try-hard).
Programme « Choix du score » : Pour pouvoir choisir le score max qu’on peut atteindre au cours d’une partie.
Programme « Choix du nombre de joueurs » : Pouvoir choisir le nombre de joueurs (1 joueur / 2 joueurs).
4 ) Conclusion :
Durant ce projet, on a dû travailler en équipe et pouvoir mettre en œuvre nos compétences en programmation. On tiens a remercier nos professeurs qui ont contribuer a la réussite de ce projet.
Enoal PERRAIS/ Mehdi Boumakhloufi / Mohamed Amine Fadlallah
Sommaire
1/ Description du projet et problématique
2/ Diagrammes
3/ Améliorations apportées
4/ Partie Logicielle
5/ Conclusion
1/ Description du projet et problématique
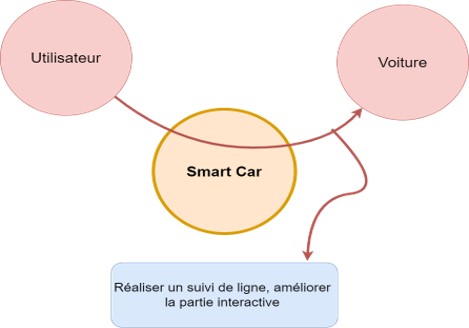
Nous avons pour projet de créer un système embarqué dans un robot qui aura de nouveaux capteurs et permettra de réaliser un suivi de ligne.
Nous avons repris le projet que nous avions choisi l’année dernière pour y ajouter des éléments supplémentaires.
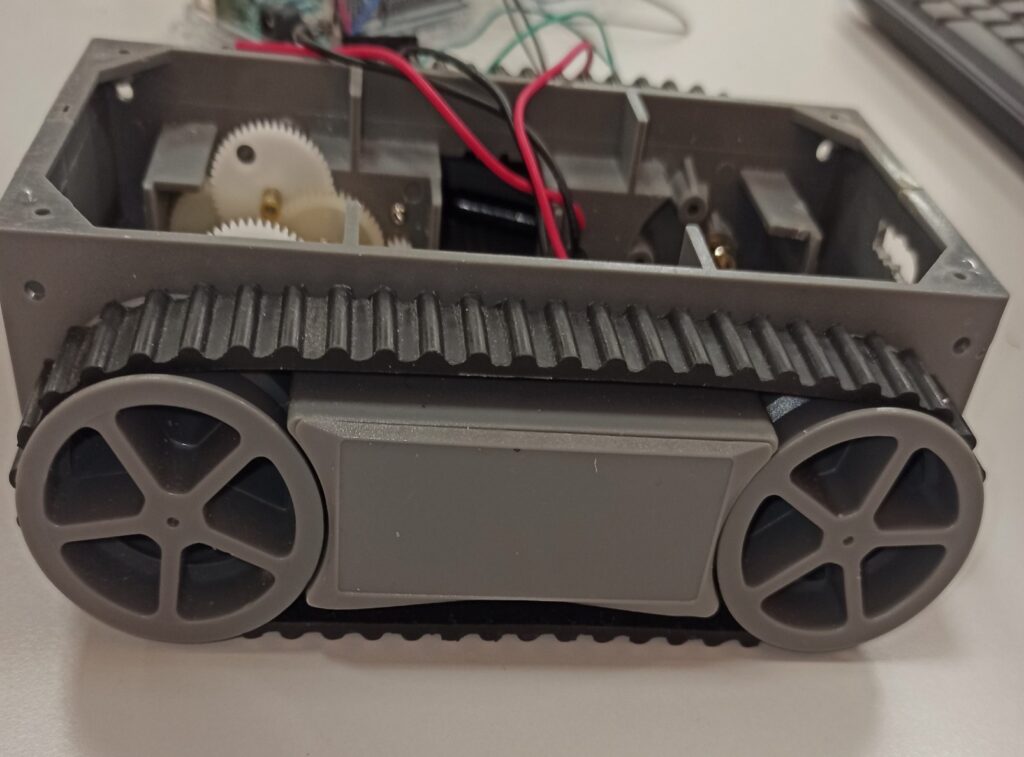
L‘année précédente nous avions démarré le projet Smart car uniquement avec le châssis de la voiture et les moteurs DC pas à pas à l’intérieur.
Le châssis :
Les moteurs pas à pas double sens :
Nous lui avons ajouté de nombreuses améliorations :
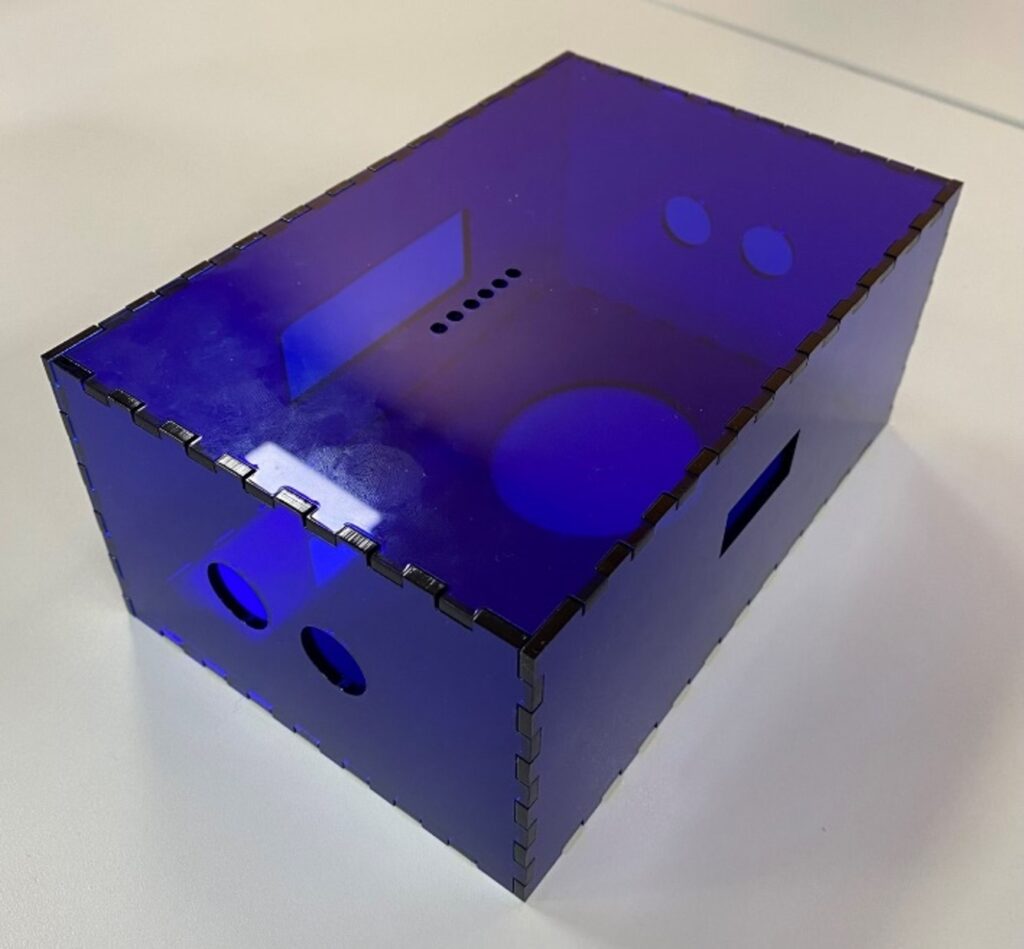
Ajout d’ un boîtier pour y ajouter du design et contenir les composants ainsi que les capteurs.
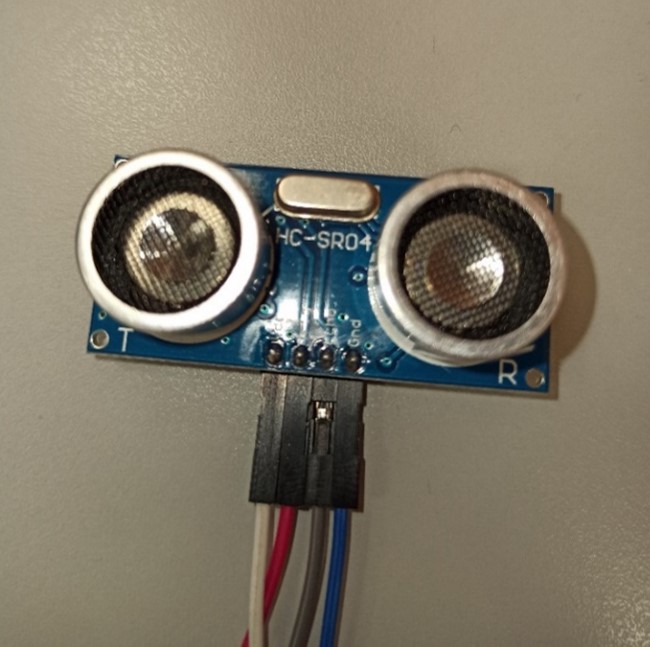
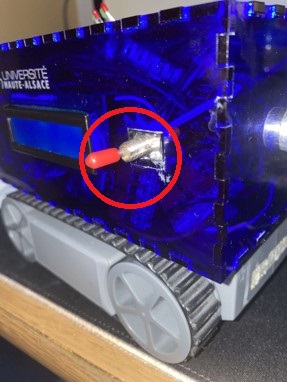
Ajout de capteurs ultrasons HC-SR04 à l’avant et à l’arrière pour détecter un obstacle (la distance de l’obstacle sera indiquée sur un afficheur 7 segments et si obstacle il y a, un buzzer bippera, les leds vertes s’éteindront et les leds rouges s’allumeront)
HC-SR04
Afficheur 7 segments
Buzzer
Leds
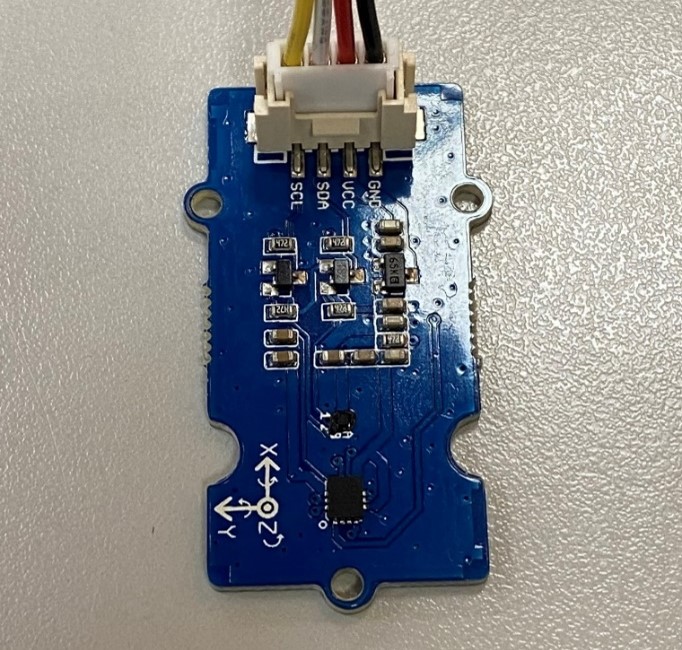
Ajout d’ un capteur de centrale inertielleIMU9DOF qui calcule l’accélération sur les axes x,y et z de la voiture :
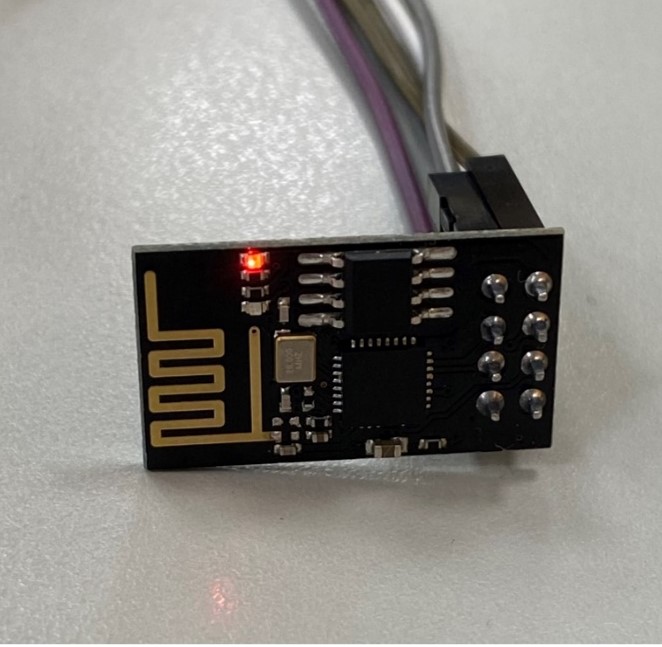
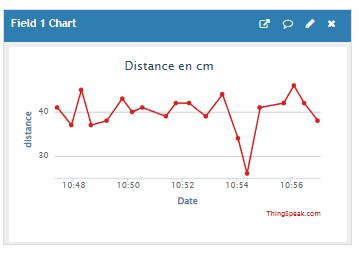
Un module WifiESP8266 qui transmet à un serveur en ligne les données des capteurs :
ESP8266
Données en temps réel
La voiture dispose d’un mode autonome et un mode manuel. Pour le mode manuel on pilotait la voiture avec un simple clavier d’ordinateur.
Un switch permet d’arrêter complètement le système en toute sécurité.
Un afficheur LCD qui permet d’afficher un texte comme le nom du projet par exemple.
2.Diagrammes
Diagramme Bête à corne :
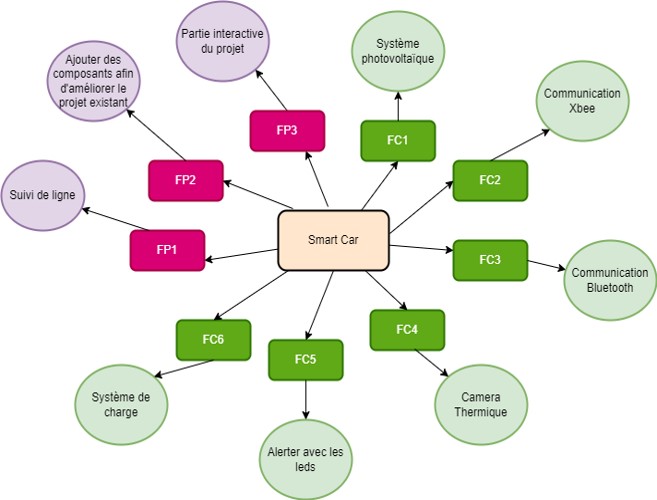
Diagramme Pieuvre :
3/ Améliorations apportées
Cette année nous allons lui ajouter différents composants électroniques et améliorer notre système pour obtenir une meilleure performance :
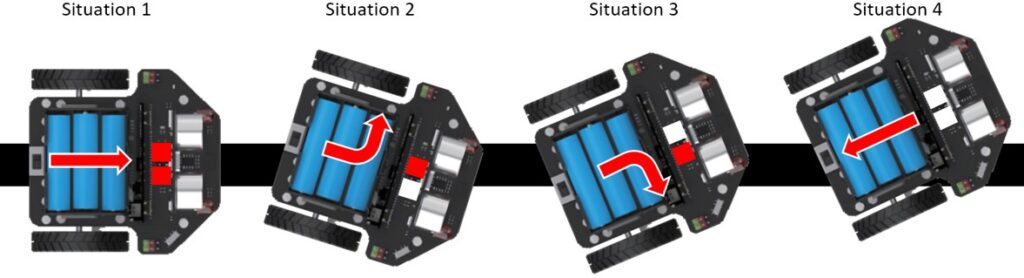
Mode suivi de ligne grâce à des capteurs infrarouges (dans l’illustration ici nous en avons deux -> carrés rouges)
Dans la situation 1 : Les deux capteurs détectent une ligne noire et continue leur trajectoire
Dans la situation 2 : Le capteur gauche détecte la ligne noire et s’y dirige donc en tournant vers elle
Dans la situation 3 : Le capteur droit détecte la ligne noire et s’y dirige donc en tournant vers elle
Dans la situation 4 : Les deux capteurs ne détectent plus la ligne noire et donc le robot recule
Capteur TCRT5000
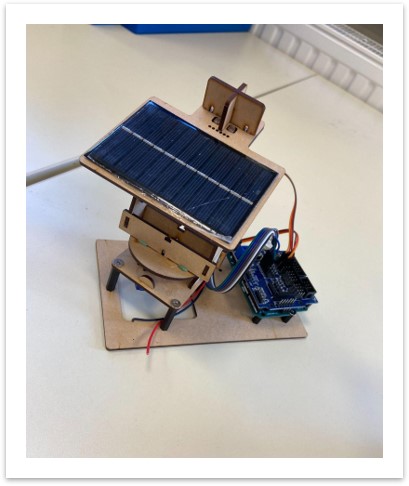
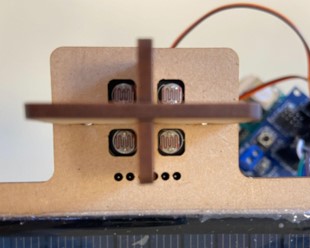
Système photovoltaïque qui se dirige vers les rayons lumineux en récupérant les photons grâce à des photorésistances
Dans ce système photovoltaïque nous trouverons différents composants :
4 Photo – résistances
Shield + Arduino Uno
2 Servomoteurs
Panneau solaire 6 V
Socle
Leds
Communication à distance :
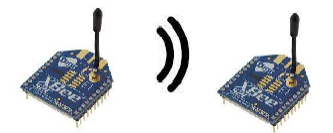
Xbee : de l’Arduino dans la smart car avec la Raspberry Pi via module Xbee RX TX : pilotage manuel de la voiture sur la Raspberry, allumer/éteindre des leds…
Module XBEE :
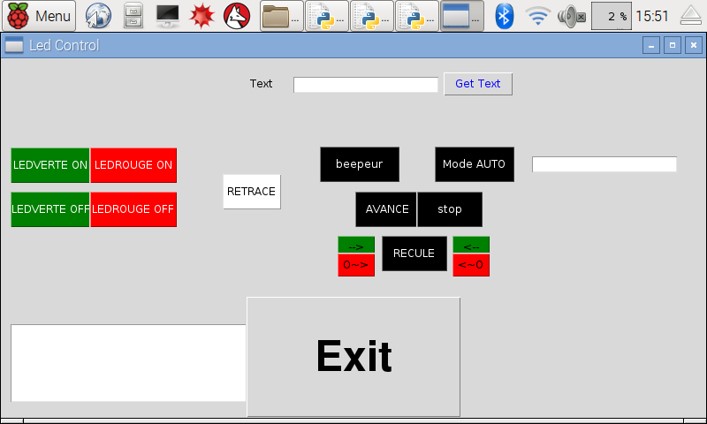
Interface Homme-machine sur l’écran de la Raspberry PI :
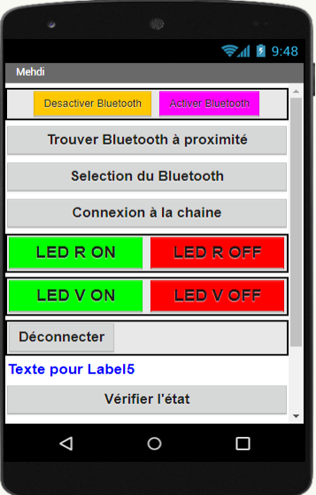
Bluetooth : On peux piloter via une application Android les leds et le moteur de la voiture avec le module HM-10
Module HM-10 :
Interface APPInventor (Android) sur le smartphone :
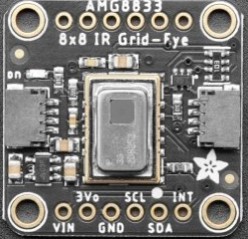
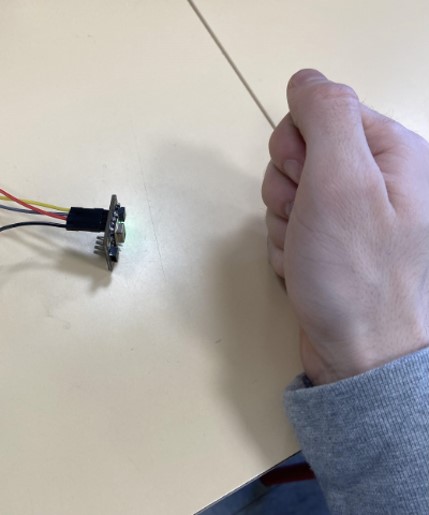
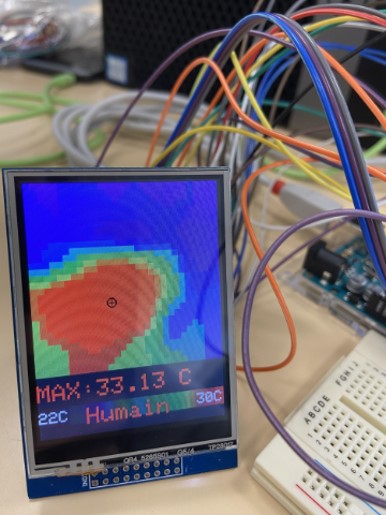
Camera thermiqueAMG8833 permettant d’alerter l’utilisateur d’une présence humaine.
En plaçant sa main devant la caméra (à gauche) on peux constater que sur un écran TFTLCD (à droite) les pixels correspondent à des pics de chaleurs et en l’occurrence ici en rouge c’est la main qui est détectée.
Quand une présence humaine est détectée (par une chaleur supérieure à 32°), il est écrit « Humain » en bas de l’écran.
4/ Partie Logicielle
Voici les logiciels que nous avons été amenés à utiliser tout au long du projet.
RASPBERRY PI
ARDUINO IDE
Python et ses librairies
5/ Conclusion
Ce projet nous a permis de développer nos compétences dans les systèmes embarqués et dans la gestion de projet en groupe.
Nous avons su améliorer notre projet autant sur les fonctionnalités que sur l’esthétique.
Le budget de la Smart Car est également monté d’un cran et cette petite voiture peut désormais être considérée comme un véritable robot haut-de-gamme.
Cet article décrit le travail réalisé dans le cadre du projet « Microscope bas-coût » de deuxième année de D.U.T. Génie Electrique et Informatique Industrielle (GEII), du module d’Etudes et Réalisations. Ce projet a été mené par Amine Ghomrani et Paul-Alexandre Patry.
Contexte du projet
Le but de ce projet est l’élaboration d’un microscope low-cost (bas-coût). L’article Low-cost, sub-micron resolution, wide-field computational microscopy using opensource hardware sert de base de travail au projet. Il montre l’opportunité que représente les récentes évolutions de l’informatique et de la photographie grand public, en décrivant la fabrication et l’utilisation d’un microscope. Les principaux constituants sont un ordinateur mono-carte Raspberry Pi 3 et une caméra couleur, également de marque Raspberry. Une matrice de 256 diodes électroluminescentes (LEDs) sert à l’éclairage des échantillons à examiner.
Cahier des charges
Le projet comporte différents objectifs.
Le microscope présenté dans l’article Low-cost, sub-micron resolution, wide-field computational microscopy using opensource hardware ne permet pas un déplacement de l’échantillon autre que manuel. La structure du microscope doit de ce fait être modifiée, pour permettre un déplacement mécanique de l’échantillon sur les axes X et Y.
Le déplacement de l’échantillon sur les axes X et Y, ainsi que le déplacement de la caméra sur l’axe Z – déjà présent – doivent être, à terme, motorisés.
Une interface graphique, doit être élaborée, pour que l’utilisateur puisse interagir avec le microscope. Toutes les fonctions du microscope doivent être commandables via cette application.
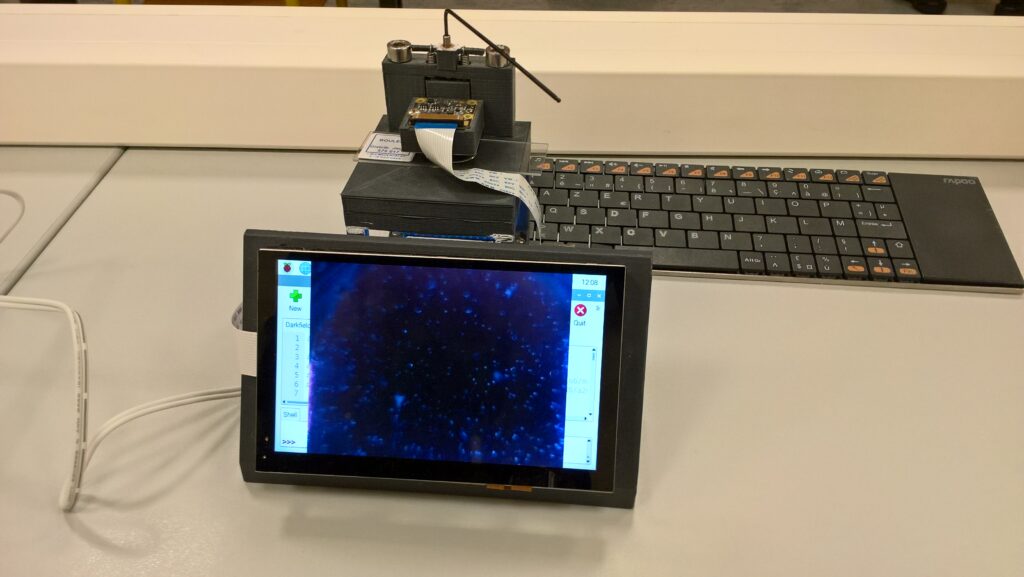
Pour mener à bien le projet, nous avons différents éléments à notre disposition. L’annexe 1 de l’article présente la marche à suivre pour construire le microscope qui sert de modèle pour le projet. La liste des composants de ce microscope, ainsi que les fichiers des pièces qui nécessitent une impression 3D, sont fournis. En plus de ces éléments, trois programmes, écrits en langage Python (version 3 et supérieures), ainsi qu’un exemplaire du microscope (Figure 1), assemblé d’après les instructions de l’article, sont mis à notre disposition.
Figure 1 : Microscope construit d’après les indications de l’article Low-cost, sub-micron resolution, wide-field computational microscopy using opensource hardware
Interface graphique – µScope APP
Programmes existants et définition des fonctions de l’application
Il a été dit ci-dessus que trois programmes, écrits en langage Python, ont été fournis en début de projet. Ces trois programmes correspondent à trois modes d’éclairages différents de l’échantillon. En plus de contrôler l’éclairage, chaque programme affiche à l’écran ce que la caméra filme en direct.
Ces programmes présentent néanmoins deux inconvénients :
Pour modifier l’éclairage de l’échantillon, l’utilisateur doit stopper l’exécution du programme en cours puis lancer l’exécution d’un autre programme.
Le flux d’images en provenance de la caméra, et affiché à l’écran, est intangible pour le pointeur de la souris, et ne peut être déplacé, réduit ou enregistré.
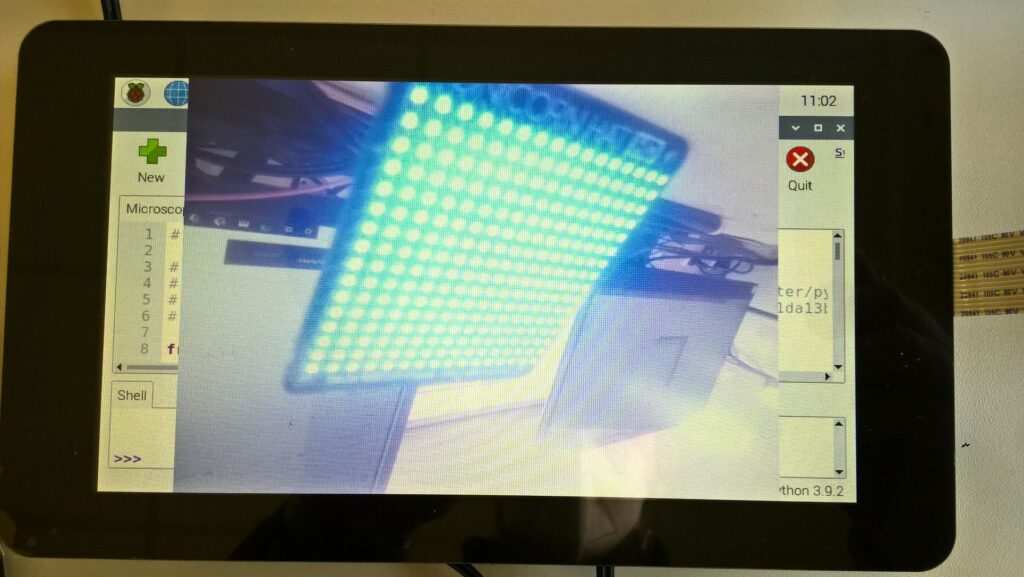
De plus, ce flux d’images étant affiché par défaut en plein milieu de l’écran, l’utilisation d’autres fonctions du Raspberry Pi est impossible (Figure 2).
Figure 2
De cette première analyse des programmes existants il ressort que :
l’application doit permettre un contrôle fluide de l’éclairage de l’échantillon, avec la possibilité de passer facilement d’un mode d’éclairage à un autre.
le flux d’image reçu par la caméra doit être contenu dans une fenêtre qui puisse être déplacée, réduite ou fermée.
Une autre tâche que l’application doit pouvoir remplir, découle de la nature même du projet. Un microscope étant un outil d’observation, l’enregistrement de photographies des échantillons observés doit être possible.
L’éclairage de l’échantillon est assuré par une matrice de LEDs RGB – Red Green Blue – ce qui signifie qu’une multitude de couleurs d’éclairage peuvent être composées. Il a également été montré, via les trois programmes présentés plus haut, qu’il était possible de choisir précisément quelles LEDs de la matrice devaient être allumées ou éteintes. Cette flexibilité de l’éclairage – choix des LEDs et de la couleur – peut être exploitée pour permettre à l’utilisateur de composer un éclairage personnalisé. Elle peut aussi être appliquée au traitement d’image, en photographiant l’échantillon sous différents angles d’éclairage et avec différentes couleurs.
Enfin, le déplacement de l’échantillon devant être motorisé, l’application doit inclure le contrôle par l’utilisateur du mouvement de l’échantillon.
Développement de l’application
Environnement de développement
Le Raspberry Pi, en tant qu’ordinateur, nécessite un Système d’exploitation pour pouvoir fonctionner. Le système d’exploitation utilisé pour ce projet est le Raspberry Pi OS version « Bullseye ».
L’application est entièrement codée en langage Python, version 3.9. La partie interface graphique de l’application a été réalisée avec la librairie Tkinter. Les principales librairies utilisées sont la librairie unicornhathd développée pour le contrôle de la matrice à LEDs, par le fabricant Pimoroni, et la librairie OpenCV pour le contrôle de la caméra, l’enregistrement et le traitement d’images.
Descriptions des fichiers de l’application
Pour que l’application puisse fonctionner, il est nécessaire que tous les fichiers exécutables se trouvent dans le même dossier. Les fichiers qui constituent l’application sont les suivants :
Fichier .py
Rôle
Split_vX (X : numéro de version)
Fichier à exécuter pour lancer l’application. Vérification de l’installation des librairies nécessaires au bon fonctionnement de l’application. Si les toutes les librairies sont installées le fichier Split_mainwindows sera appelé. Sinon le fichier Split_warnwindows sera appelé.
Split_warnwindows
Affichage dans une fenêtre de la liste des librairies manquantes sur l’appareil et nécessaires au bon fonctionnement de l’application.
Split_mainwindows
Définition de la fenêtre principale de l’application. Fait appel aux fonctions définies dans les fichiers Split_stepper, Split_capture et Split_unicornhathd. Appel des fichiers, Split_helpwindows, Split_infowindows et Split_advancedwindows si l’utilisateur appuie sur les boutons correspondants.
Split_helpwindows
Définition de la fenêtre d’aide de l’application.
Split_infowindows
Définition de la fenêtre d’information sur l’application.
Split_advancedwindows
Définition de la fenêtre des réglages avancés. Cette fenêtre réunit les éléments définis dans les fichiers Split_hatwindows et Split_capwindows.
Split_hatwindows
Définition des éléments de contrôle personnalisé de l’éclairage (mélangeur de couleur, éclairage progressif…). Fait appel aux fonctions définies dans les fichiers Split_capture et Split_unicornhathd.
Split_capwindows
Définition du bouton « Créer un film » et des fonctions utilisées pour la création de vidéos.
Split_unicornhathd
Définition des fonctions de contrôle de la matrice à LEDs.
Split_stepper
Définition des fonctions de contrôle des moteurs pas à pas.
Split_capture
Définition des fonctions de traitement d’images et de sauvegarde d’images.
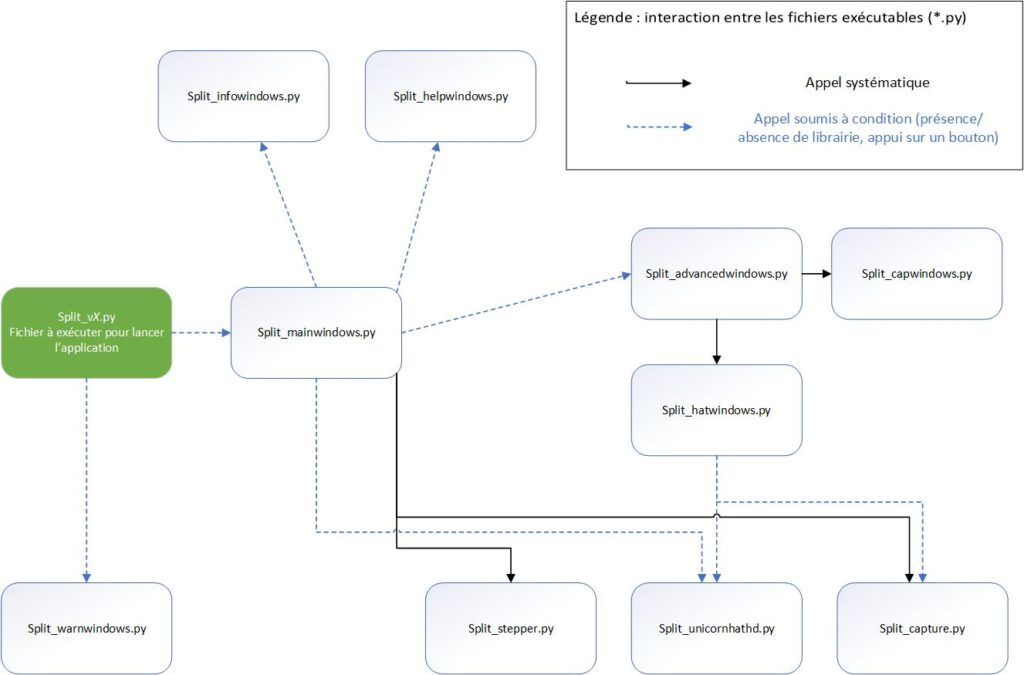
Le diagramme suivant décrit de manière visuelle l’ ordre dans lequel sont appelés les fichiers et si cet appel se fait systématiquement, ou est conditionné à un événement (ex. : appui sur un bouton) :
Figure 3 : Interactions entre fichiers
Contrôle des librairies
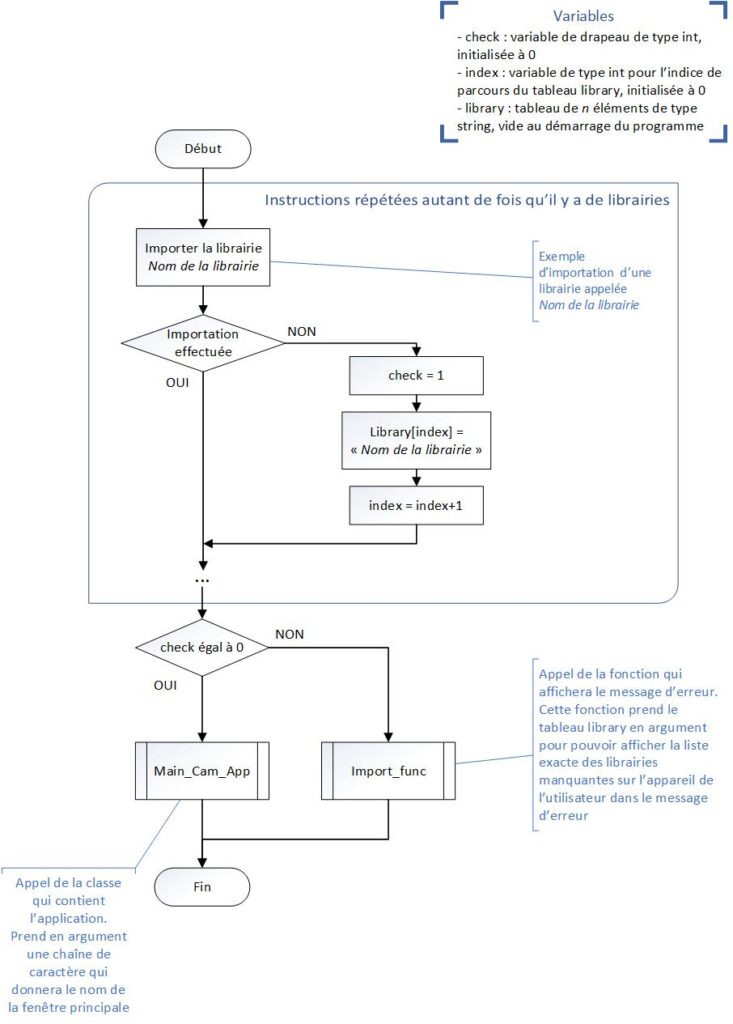
Le diagramme suivant montre le mécanisme utilisé pour vérifier la présence des librairies nécessaires au bon fonctionnement de l’application :
Figure 4 : Mécanisme d’importation des librairies
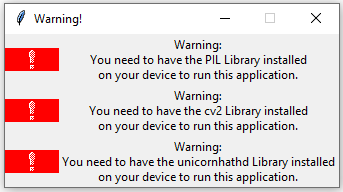
Si les librairies nécessaires au bon fonctionnement de l’application ne sont pas installées la liste des librairies manquantes sera affichée (Figure 5).
Figure 5 : exemple de message d’erreur
Utilisation du GPIO par l’application
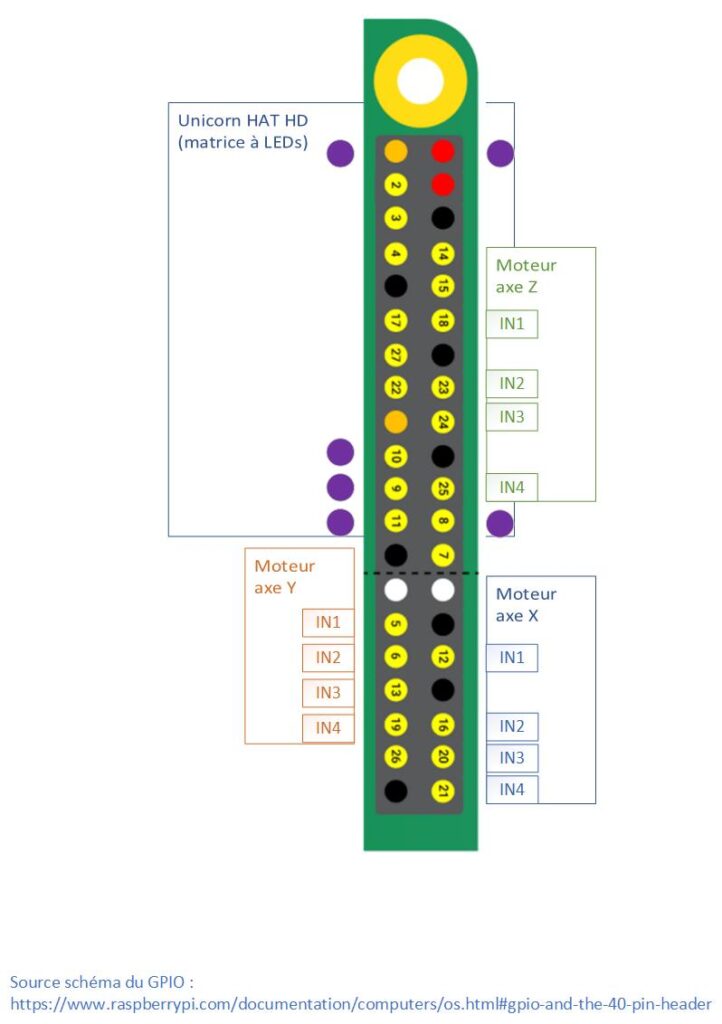
Le schéma suivant montre les pins utilisés pour le contrôle de la matrice à LEDs et des trois moteurs pas à pas (Figure 6).
Figure 6 : Utilisation des pins du GPIO
Les moteurs pas à pas sont alimentés par une autre source que la carte Raspberry Pi. Les masses des drivers des moteurs doivent donc être reliées à la masse de l’alimentation, elle même reliée à la masse du Raspberry Pi.
La matrice à LEDs est alimentée directement par le Raspberry Pi et doit aussi être reliée à la masse de la carte.
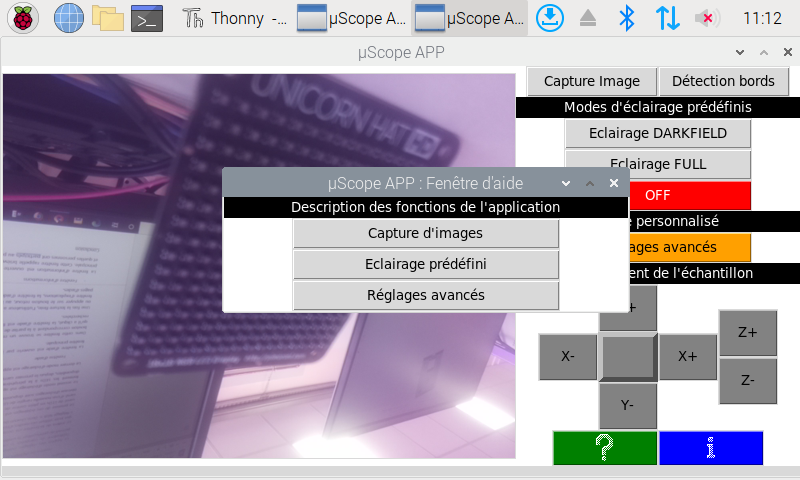
µScope APP : description des fenêtres de l’application
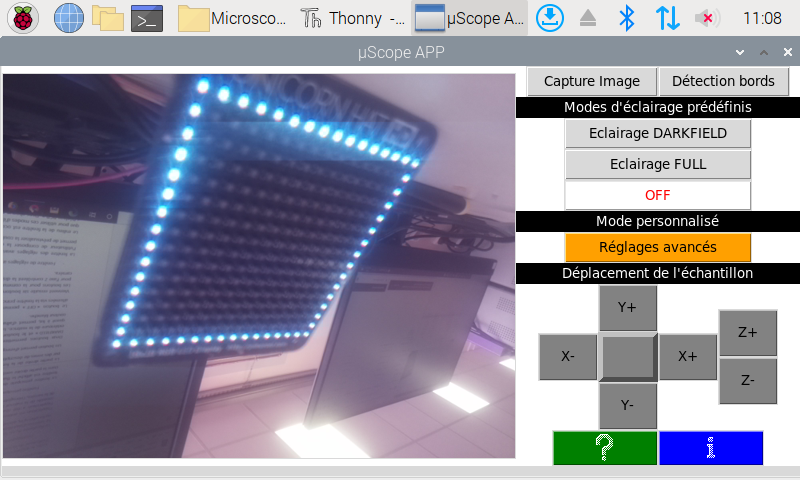
Fenêtre principale
La fenêtre principale de l’application (Figure 7) est découpée en deux parties. Dans la partie gauche de la fenêtre est affiché le flux d’images en provenance de la caméra. Cet affichage se fait en temps réel. Dans la partie droite sont rassemblés les boutons de contrôles des fonctions de base de l’application.
Figure 7 : Fenêtre principale de l’application
La partie droite de la fenêtre principale est elle-même divisée en plusieurs sous parties, identifiées par des zones de descriptions.
Un bouton permet d’enregistrer l’image actuellement filmée par la caméra.
Deux boutons permettent d’allumer des modes d’éclairage prédéfinis : le bouton « Eclairage DARKFIELD » (Figure 8) et le bouton « Eclairage FULL » (Figure 9).
Le premier permet d’allumer les LEDs de la rangée extérieure de la matrice. Le but est d’obtenir un éclairage rasant de l’échantillon.
Figure 8
Le second bouton, quant à lui, permet d’allumer toutes les LEDs de la matrice. Dans les deux cas, l’éclairage est de couleur blanche.
Figure 9
Le bouton « OFF » permet d’éteindre complètement les LEDs de la matrice, qu’elles aient été allumées via la fenêtre principale, ou la fenêtre des réglages avancés.
Viennent ensuite six boutons qui permettent de déplacer l’échantillon en commandant les moteurs. Les boutons pour la commande des axes X et Y permettent de déplacer l’échantillon. Les boutons pour l’axe Z contrôlent la distance entre la caméra et l’échantillon, via la translation du support de la caméra.
Fenêtre de réglages avancés
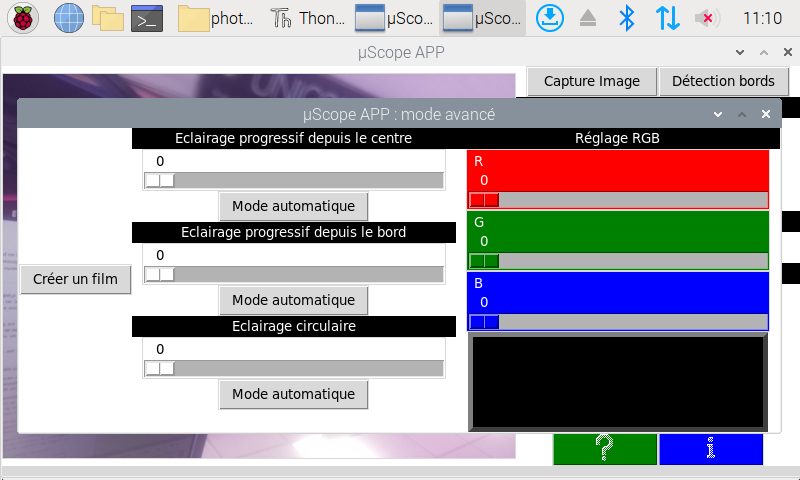
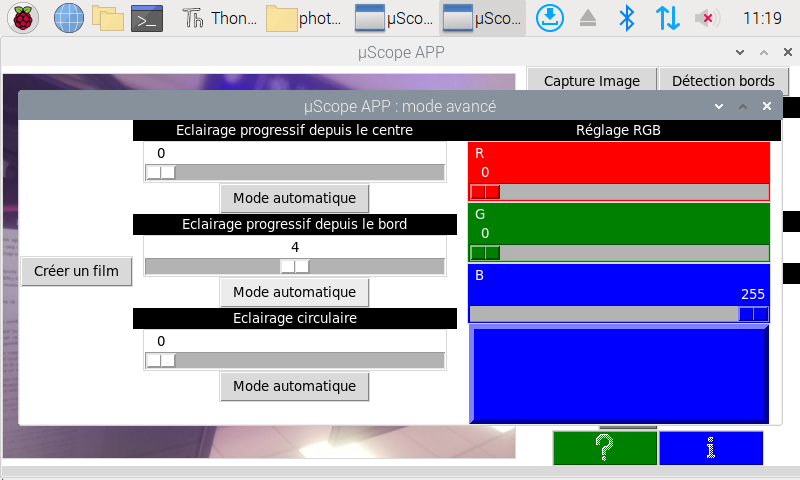
La fenêtre des réglages avancés est scindée en trois parties (Figure 10).
Figure 10
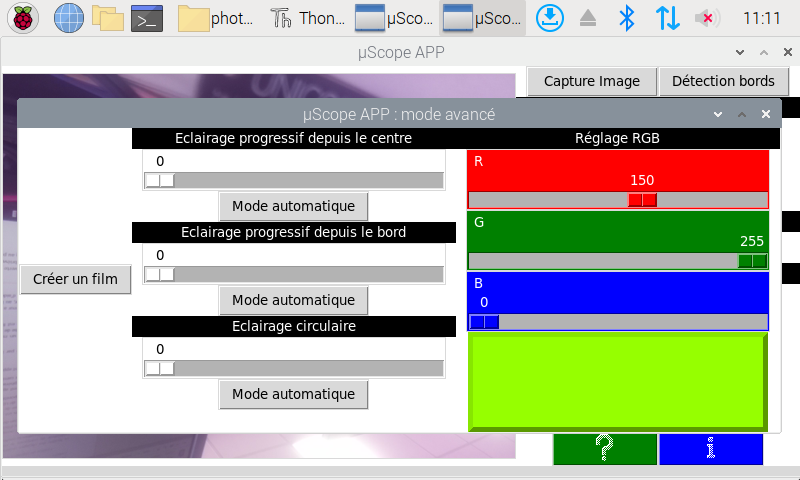
La partie « Réglage RGB » permet à l’utilisateur de composer la couleur de l’éclairage de l’échantillon. La zone sous les trois tirettes permet de prévisualiser la couleur obtenue par le mélange des couleurs rouge, vert et bleu (Figure 11).
Figure 11 : exemple de composition d’une couleur
Le milieu de la fenêtre est occupé par les commandes de trois modes d’éclairage dits « progressifs ». Il est à noter que pour utiliser ces modes d’éclairage – ainsi que les modes dits automatiques – il faut d’abord avoir composé une couleur, à l’aide de la partie « Réglage RGB ». Dans chacun des modes d’éclairages, le niveau 0 sert à éteindre la matrice à LEDs.
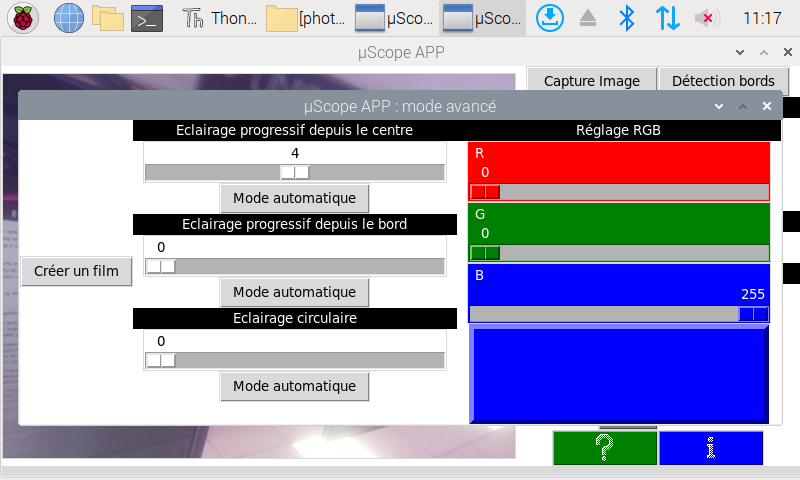
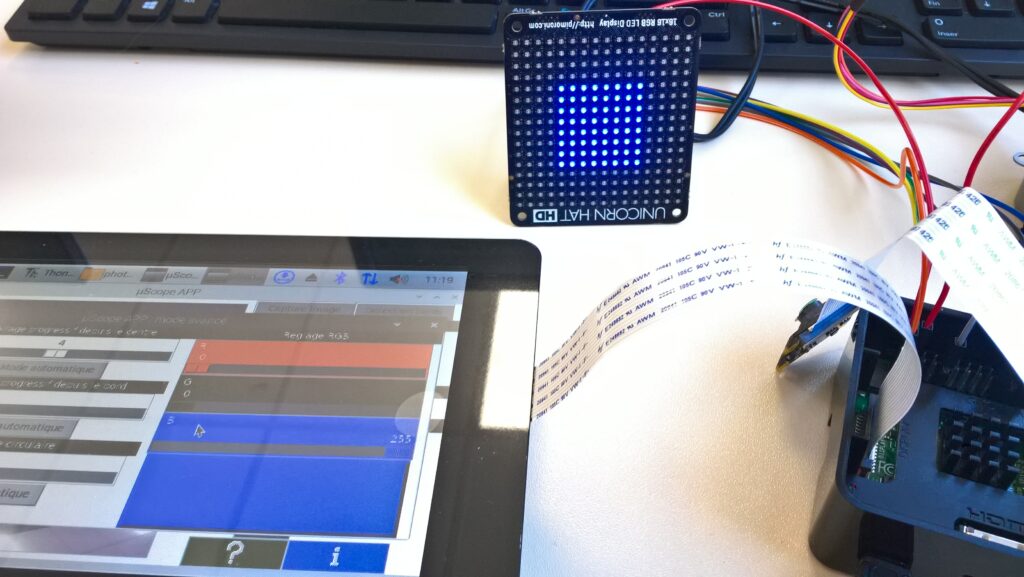
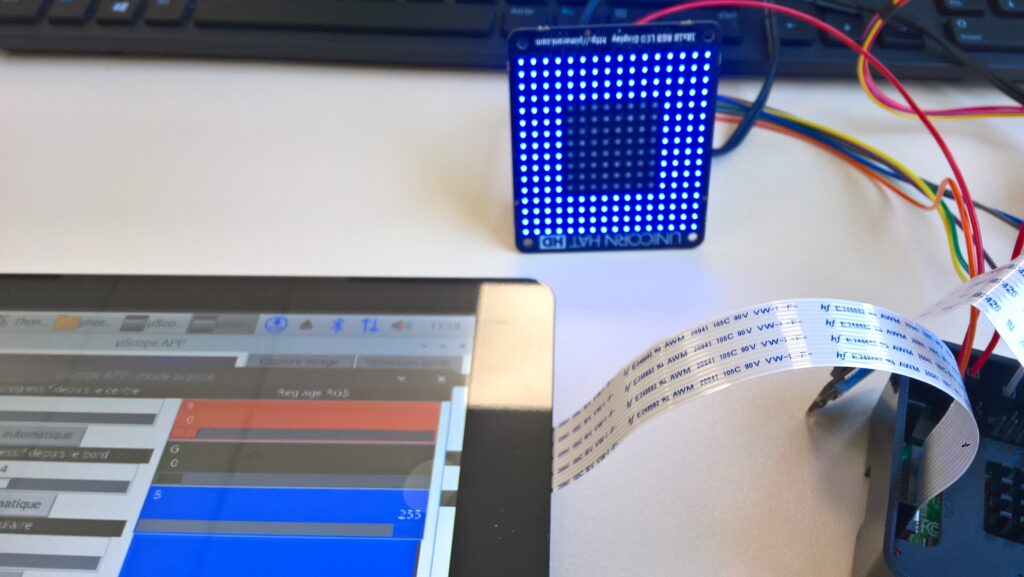
Le premier de ces éclairages est un éclairage « depuis le centre ». Le niveau d’éclairage 1 allume un carré de LEDs en plein centre de la matrice. Chaque niveau d’éclairage supérieur épaissit le bord du carré d’une nouvelle rangée de LEDS, jusqu’à allumer toutes les LEDS avec le dernier niveau. En tout 8 niveaux d’éclairages sont disponibles, en exceptant le niveau 0 (Figures 12 et 13).
Figure 12 : Eclairage progressif depuis le centre de niveau 4 et de couleur bleueFigure 13 : Résultat de la commande sur la matrice à LEDs
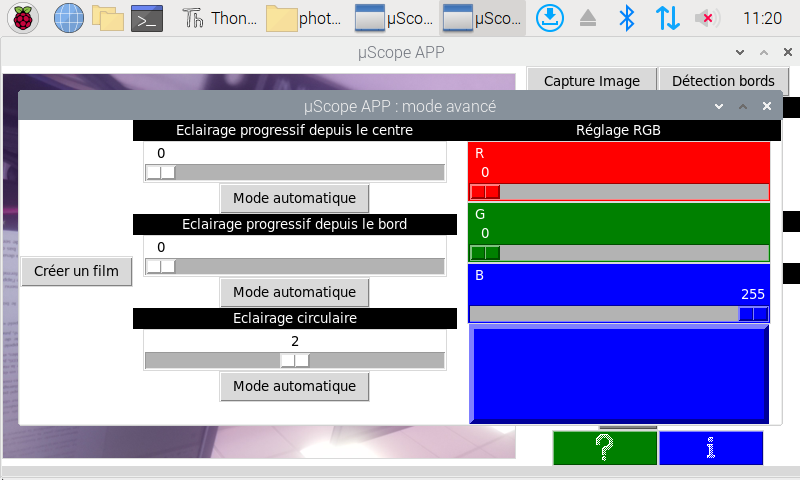
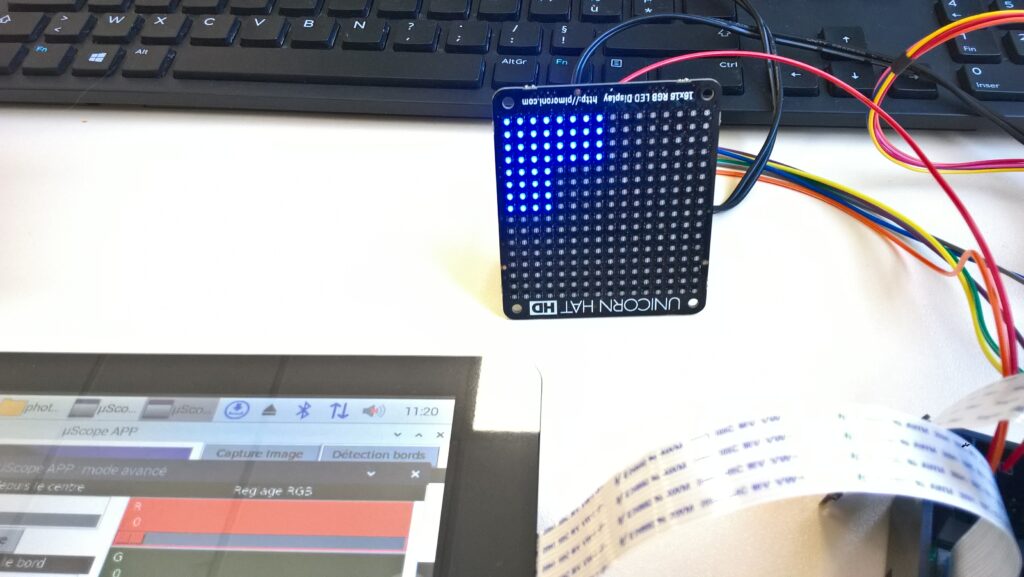
Le second mode d’éclairage est appelé « depuis le bord ». Le niveau d’éclairage 1 allume le carré que forment les LEDs à la périphérie de la matrice. Dans ce cas aussi, 8 niveaux d’éclairage sont disponibles, depuis le premier carré, jusqu’à l’utilisation de toutes les LEDs de la matrice (Figure 14 et 15).
Figure 14 : Eclairage progressif depuis le bord de niveau 4 et de couleur bleueFigure 15 : Résultat de la commande sur la matrice à LEDs
Le dernier mode d’éclairage est appelé « Eclairage circulaire ». Contrairement aux modes d’éclairage précédents, celui-ci ne comprend que quatre niveaux d’éclairage. Les LEDs allumées forment un L contenu dans un quart de la matrice. Chaque niveau d’éclairage correspond à la commande d’un quart différent de la matrice (Figures 16 et 17).
Figure 16 : Eclairage circulaire de rang 2 et de couleur bleueFigure 17 : Résultat de la commande sur la matrice à LEDs
A chaque mode d’éclairage est associé un bouton « Mode automatique ». Dans ce mode une photographie de l’échantillon est prise pour chaque niveau d’éclairage disponible. Le bouton « Créer un film » , à gauche de la fenêtre, permet de générer un film à partir de la série de photographies prises.
Fenêtre d’aide
La fenêtre d’aide est ouverte par le bouton vert marqué d’un point d’interrogation, situé dans la fenêtre principale (Figure 18).
Figure 18
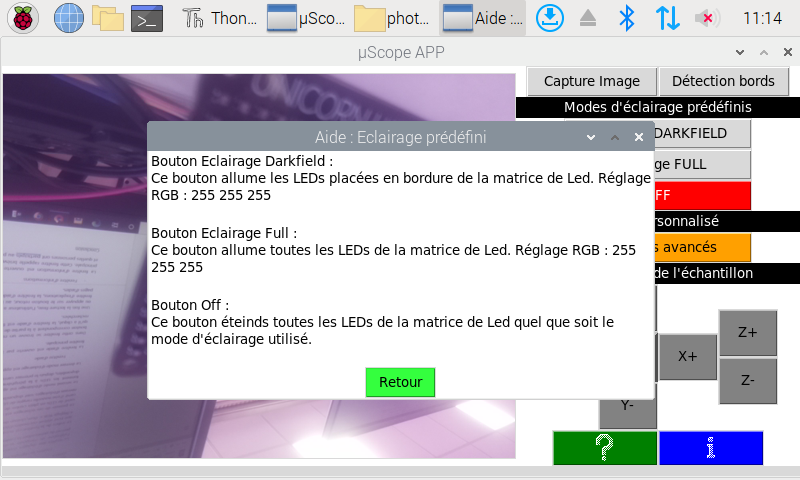
Dans cette fenêtre se trouve un menu constitué de plusieurs boutons. L’utilisateur appuie sur le bouton correspondant à la partie de l’application sur laquelle il cherche des renseignements. Une fois qu’il a cliqué, la fenêtre d’aide est fermée et remplacée par une fenêtre contenant les explications recherchées (Figure 19).
Figure 19
Une fois la lecture finie, deux choix s’offrent à l’utilisateur :
soit fermer directement la fenêtre d’explications
soit appuyer sur le bouton retour, au bas de la fenêtre.
Dans le second cas, après la fermeture de la fenêtre d’explications, la fenêtre d’aide sera de nouveau affichée, permettent l’exploration des autres pages d’aides.
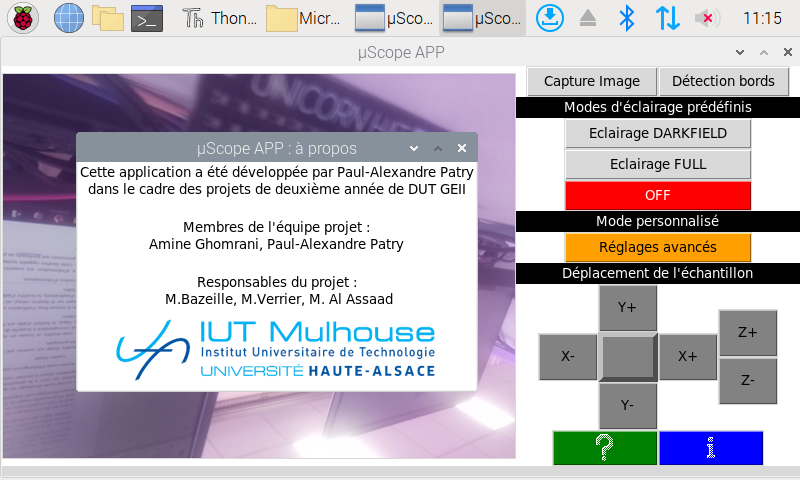
Fenêtre d’information
La fenêtre d’information est ouverte par le bouton bleu marqué d’un i, situé dans la fenêtre principale. Cette fenêtre rappelle brièvement dans quel contexte cette application a été développée et quelles personnes ont participés au projet (Figure 20).
Figure 20
Bibliographie
LOW-COST, SUB-MICRON RESOLUTION, WIDE-FIELD COMPUTATIONAL MICROSCOPY USING OPENSOURCE HARDWARE OMAS AIDUKAS, ANDREW R. HARVEY, PAVAN C. KONDA, REGINA ECKERT, LAURA WALLER
TKINTER REFERENCE: A GUI FOR PYTHON NEW MEXICO TECH COMPUTER CENTER
CAMERA PROJECTS BOOK : 39 EXPERIMENTS WITH RASPBERRY PI AND ARDUINO IBRAHIM DOGAN ELEKTOR INTERNATIONAL MEDIA – 2019 – ISBN : 978-1-907-92077-6 (Disponible à la Bibliothèque Universitaire, Campus Collines)
Notre but est donc de trouver un moyen de trier et de calculer la somme de ces pièces automatiquement
Cahier des charges fonctionnel
Cahier des charges fonctionnel
Trier
Distinguer les différentes pièces
Stocker les pièces par valeur
Compter
Calculer la somme total
Calculer les sommes par valeur
Calculer la différence par rapport à un objectif
Afficher (IHM)
Vue Principale
Somme totale
Vue Tiroir
Gestion de tous les tiroirs
Vue Objectif
Fixer une valeur à atteindre et l’écart avec celle-ci
Vue Conversion
Comparer la somme avec d’autre monnaies prédéfini
Coût
Environ 130 €
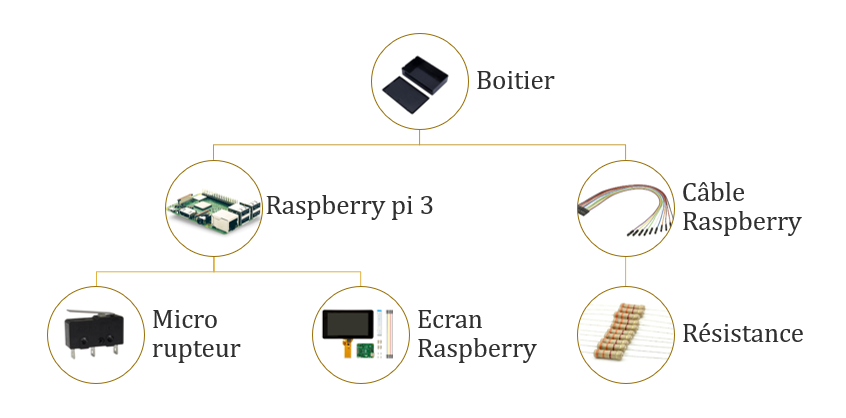
Matériel utilisé
Solutions techniques mises en œuvre
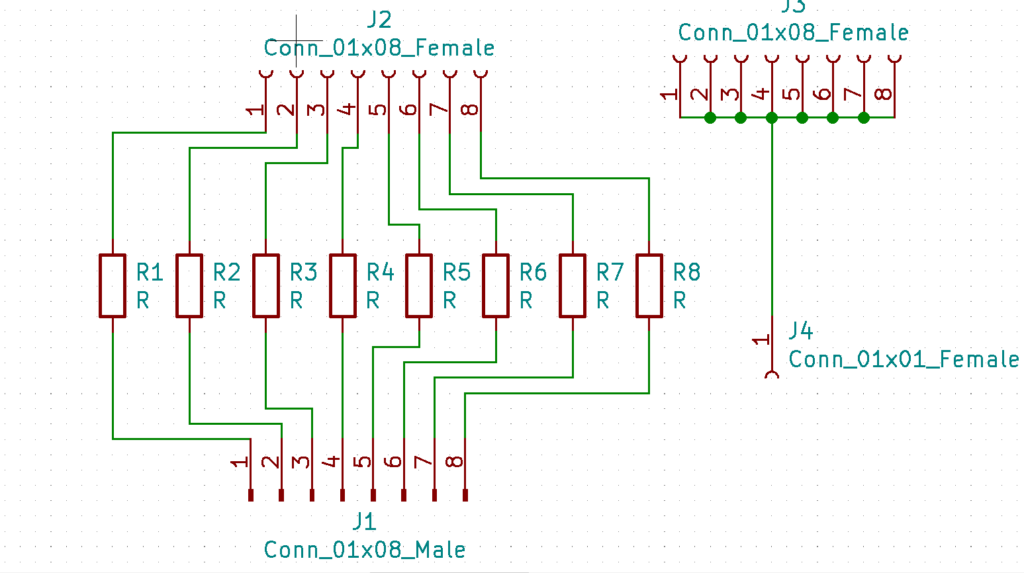
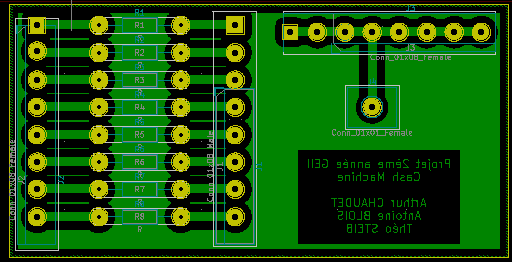
Partie électronique
Nous avons réalisé une carte pour regrouper les résistances. Cela permet de simplifier le câblage et le rangement à l’intérieur de la boîte ce qui permet une meilleur ergonomie à lors d’action dans la boîte (tels que la récupération des pièces et changement éventuel de composants).
Nous avons mis des résistances de 3,3k Ohm afin d’enlever l’effet de rebond du signal produit par les capteurs.
Partie programmation
Interface graphique
L’IHM (interface homme-machine) permet d’interagir et de rendre compte du contenu de la tirelire.
Pour cela nous utilisons la bibliothèque Tkinter qui est une graphique libre d’origine pour le langage Python, permettant la création d’interfaces graphiques.
Utilisation de la bibliothèque Tkinter
Menu principale avec ses 3 sous-menu
from tkinter import *
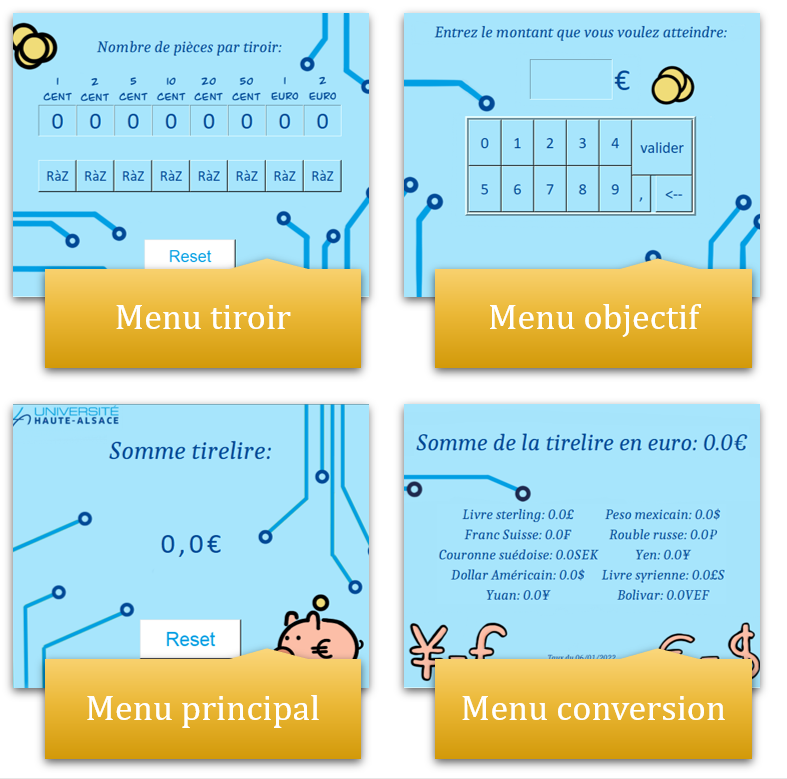
Résultat final pour chaque menu
Menu tiroir
Menu objectif
Menu principal
Menu conversion
Permet une visualisation du nombre de pièces par tiroir
Permet de définir un montant à atteindre
Affiche la somme et permet d’accéder aux autres menus.
Convertit la somme actuelle dans la tirelire en différente monnaie
Détection pièce
Parallèlement au programme qui gère l’interface graphique, un programme détecte les impulsions des capteurs et incrémente à la somme de la tirelire la valeur qui correspond à chaque capteur.
Utilisation de la bibliothèque « gpiozero »
Incrémente la valeur de la pièce
from gpiozero import Button
Partie conception
Utilisation du logiciel CorelDRAW
Conclusion du projet et amélioration possibles
Durant ce projet nous avons du travailler en équipe pour réaliser les différentes tâches et les mettre en communs pour finaliser le projet.
En guise d’amélioration, nous aurions pu rajouter un moteur qui aurait permis un écoulement plus fluide des pièces dans l’entonnoir.