

Enoal PERRAIS/ Mehdi Boumakhloufi / Mohamed Amine Fadlallah
Sommaire
1/ Description du projet et problématique
2/ Diagrammes
3/ Améliorations apportées
4/ Partie Logicielle
5/ Conclusion
1/ Description du projet et problématique
Nous avons pour projet de créer un système embarqué dans un robot qui aura de nouveaux capteurs et permettra de réaliser un suivi de ligne.
Nous avons repris le projet que nous avions choisi l’année dernière pour y ajouter des éléments supplémentaires.
L‘année précédente nous avions démarré le projet Smart car uniquement avec le châssis de la voiture et les moteurs DC pas à pas à l’intérieur.
Le châssis :
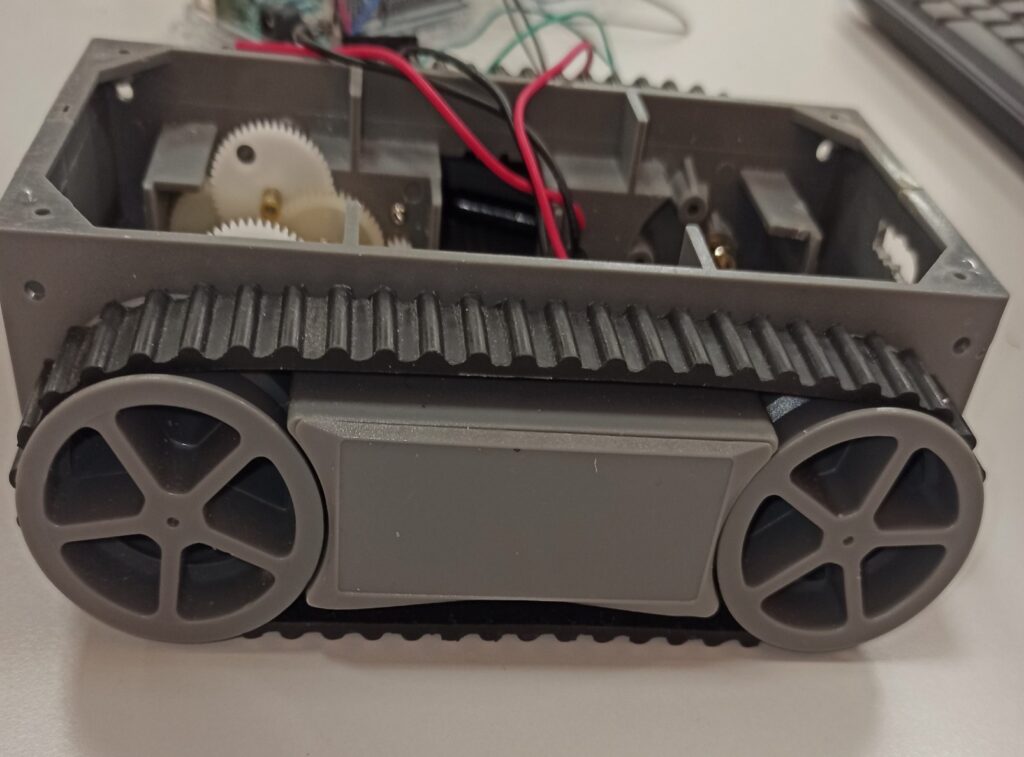
Les moteurs pas à pas double sens :

Nous lui avons ajouté de nombreuses améliorations :
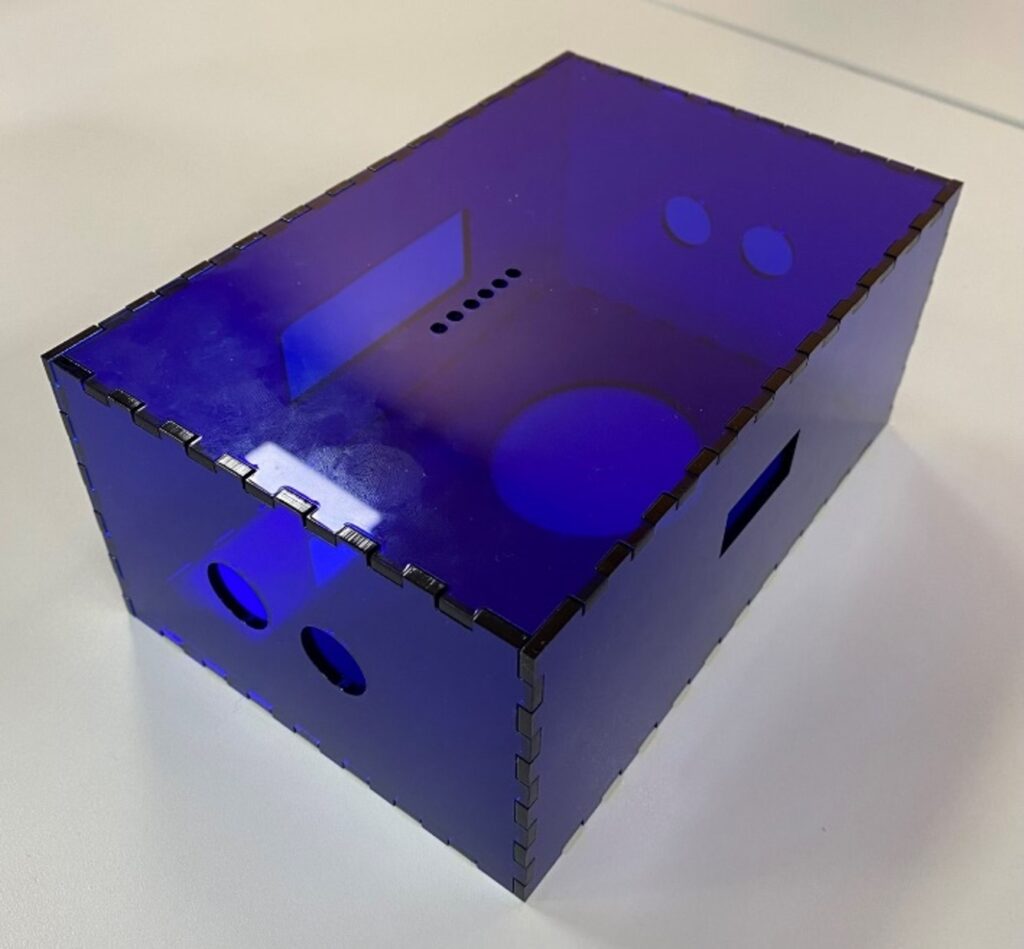
- Ajout d’ un boîtier pour y ajouter du design et contenir les composants ainsi que les capteurs.
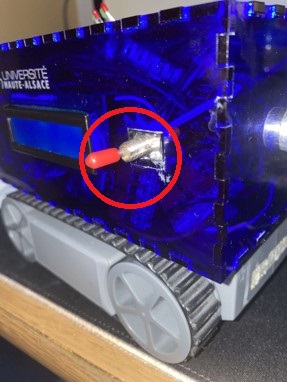
- Ajout de capteurs ultrasons HC-SR04 à l’avant et à l’arrière pour détecter un obstacle (la distance de l’obstacle sera indiquée sur un afficheur 7 segments et si obstacle il y a, un buzzer bippera, les leds vertes s’éteindront et les leds rouges s’allumeront)
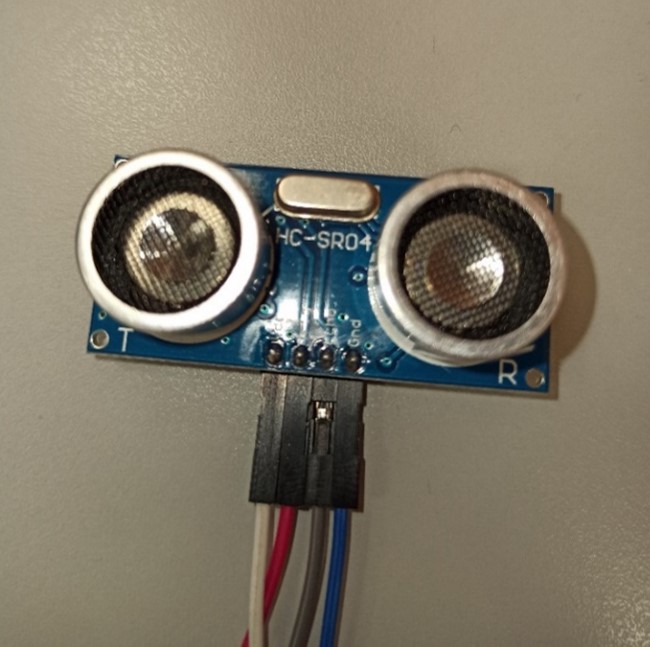
HC-SR04 
Afficheur 7 segments

Buzzer 
Leds
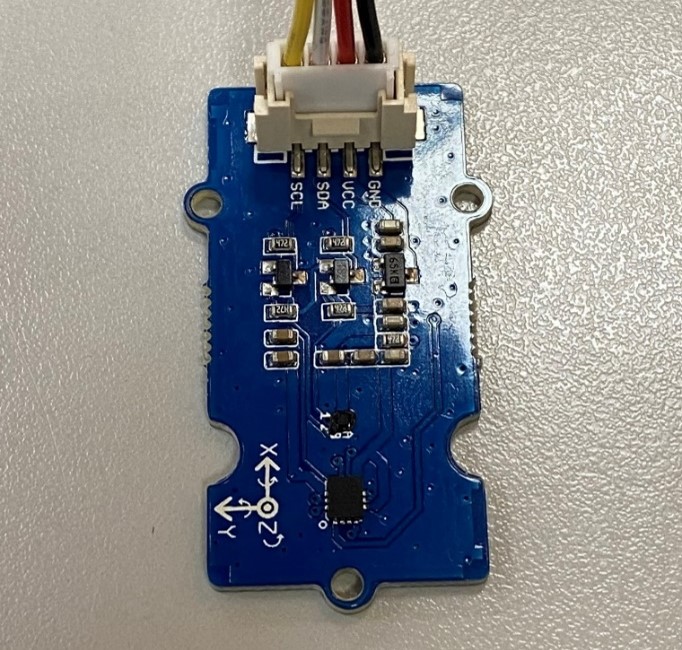
- Ajout d’ un capteur de centrale inertielle IMU9DOF qui calcule l’accélération sur les axes x,y et z de la voiture :
- Un module Wifi ESP8266 qui transmet à un serveur en ligne les données des capteurs :
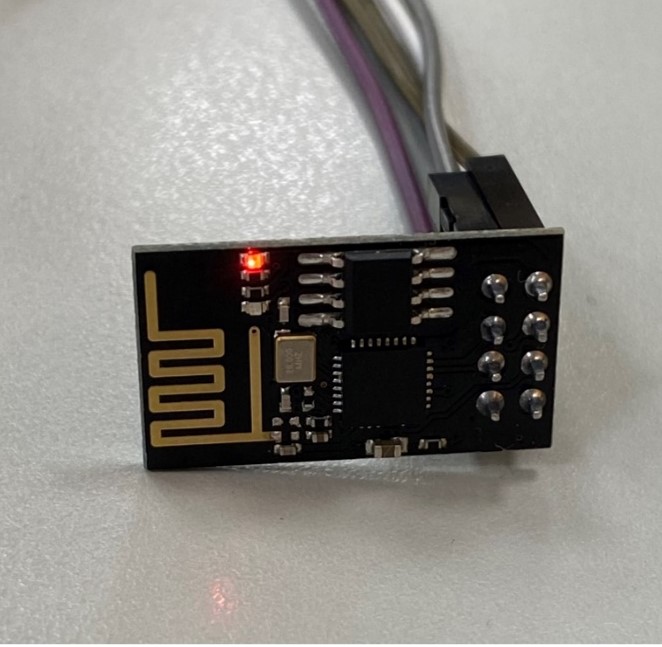
ESP8266 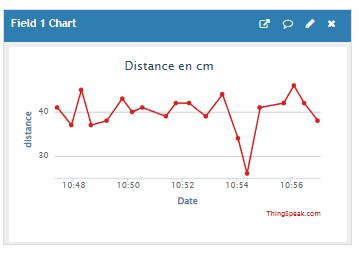
Données en temps réel
- La voiture dispose d’un mode autonome et un mode manuel. Pour le mode manuel on pilotait la voiture avec un simple clavier d’ordinateur.
- Un switch permet d’arrêter complètement le système en toute sécurité.
- Un afficheur LCD qui permet d’afficher un texte comme le nom du projet par exemple.

2. Diagrammes
Diagramme Bête à corne :
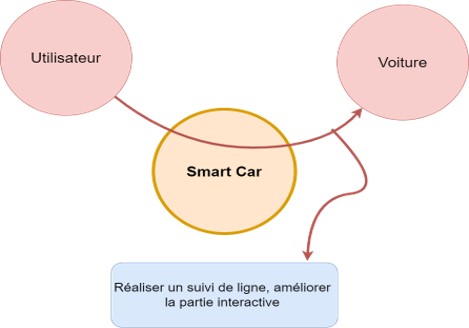
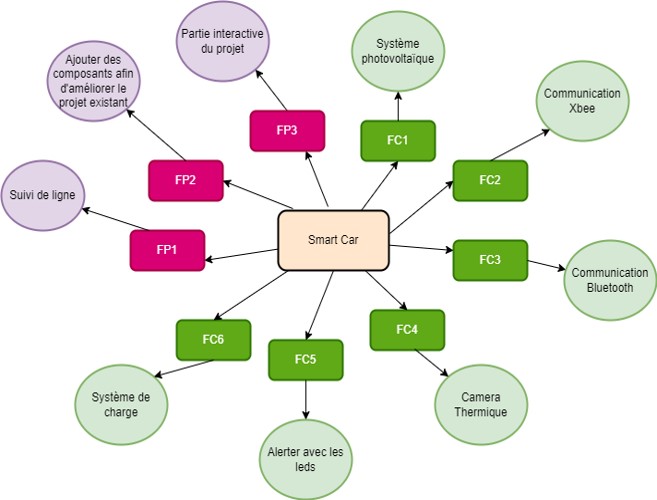
Diagramme Pieuvre :
3/ Améliorations apportées
Cette année nous allons lui ajouter différents composants électroniques et améliorer notre système pour obtenir une meilleure performance :
- Mode suivi de ligne grâce à des capteurs infrarouges (dans l’illustration ici nous en avons deux -> carrés rouges)
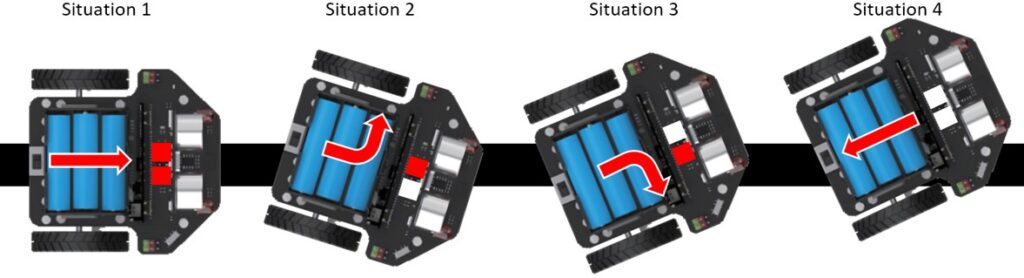
Dans la situation 1 : Les deux capteurs détectent une ligne noire et continue leur trajectoire
Dans la situation 2 : Le capteur gauche détecte la ligne noire et s’y dirige donc en tournant vers elle
Dans la situation 3 : Le capteur droit détecte la ligne noire et s’y dirige donc en tournant vers elle
Dans la situation 4 : Les deux capteurs ne détectent plus la ligne noire et donc le robot recule

- Système photovoltaïque qui se dirige vers les rayons lumineux en récupérant les photons grâce à des photorésistances
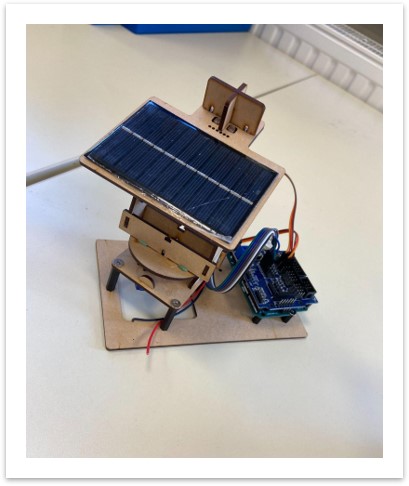
Dans ce système photovoltaïque nous trouverons différents composants :
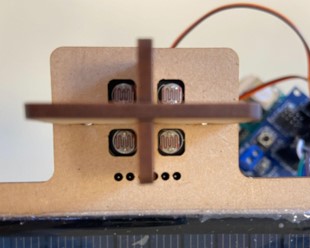
4 Photo – résistances 
Shield + Arduino Uno 
2 Servomoteurs 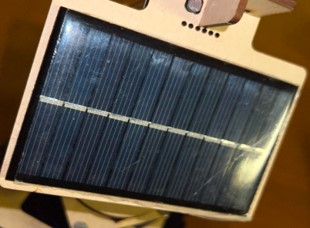
Panneau solaire 6 V 
Socle 
Leds
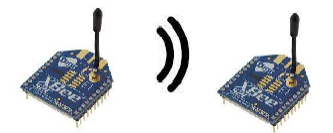
- Communication à distance :
- Xbee : de l’Arduino dans la smart car avec la Raspberry Pi via module Xbee RX TX : pilotage manuel de la voiture sur la Raspberry, allumer/éteindre des leds…
Module XBEE :
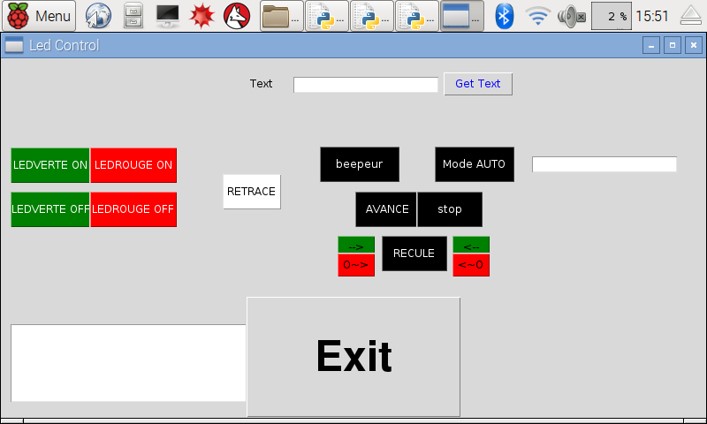
Interface Homme-machine sur l’écran de la Raspberry PI :
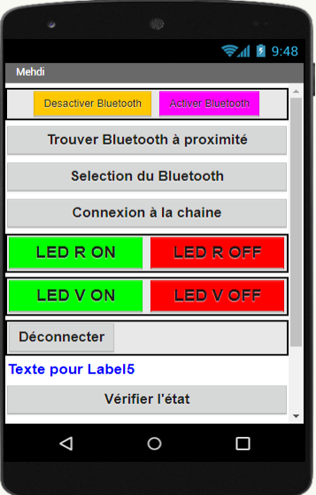
- Bluetooth : On peux piloter via une application Android les leds et le moteur de la voiture avec le module HM-10
Module HM-10 :

Interface APPInventor (Android) sur le smartphone :
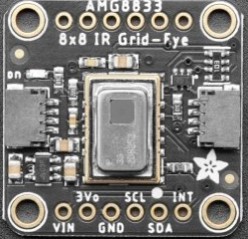
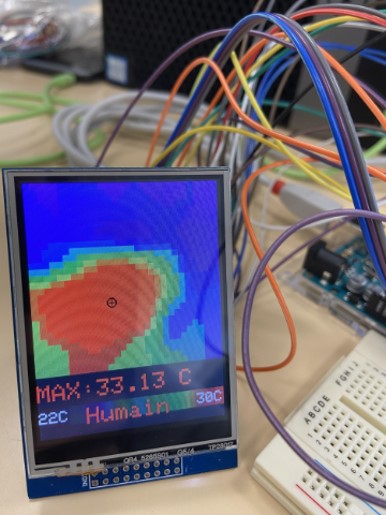
- Camera thermique AMG8833 permettant d’alerter l’utilisateur d’une présence humaine.
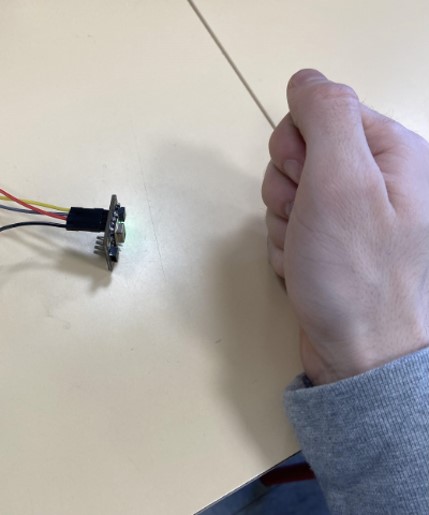
En plaçant sa main devant la caméra (à gauche) on peux constater que sur un écran TFTLCD (à droite) les pixels correspondent à des pics de chaleurs et en l’occurrence ici en rouge c’est la main qui est détectée.
Quand une présence humaine est détectée (par une chaleur supérieure à 32°), il est écrit « Humain » en bas de l’écran.
4/ Partie Logicielle
Voici les logiciels que nous avons été amenés à utiliser tout au long du projet.
RASPBERRY PI 
ARDUINO IDE 
Python et ses librairies


5/ Conclusion
Ce projet nous a permis de développer nos compétences dans les systèmes embarqués et dans la gestion de projet en groupe.
Nous avons su améliorer notre projet autant sur les fonctionnalités que sur l’esthétique.
Le budget de la Smart Car est également monté d’un cran et cette petite voiture peut désormais être considérée comme un véritable robot haut-de-gamme.