
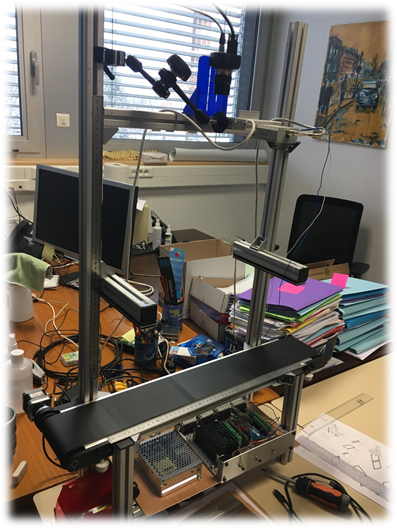
Améliorer le projet du banc de vision déjà commencé, afin de le rendre plus ergonomique, facile d’utilisation et plus présentable lors de journées des carrières et journées portes ouvertes. Le Banc de vision s’inscrit dans le savoir-faire d’un apprenant en DUT Génie électrique et informatique industrielle. C’est une maquette miniaturisée d’une ligne de supervision, pour le traitement de matières d’œuvre, défilant sur le convoyeur.
1. Étude du projet
Besoin du projet et objectifs : Pour ce projet il fallait modifier la partie hardware et software du banc ainsi que la structure même du banc.
Pour la partie hardware, nous voulions changer le câblage et la disposition de ce dernier.
Pour la partie software, nous voulions garder le corps principal du programme et ne modifier que la partie qui concerne l’avancement du tapis.
Enfin pour l’esthétique de la structure, il fallait la rendre plus portable et beaucoup plus sympathique à présenter.
2. Diagrammes Fonctionnels
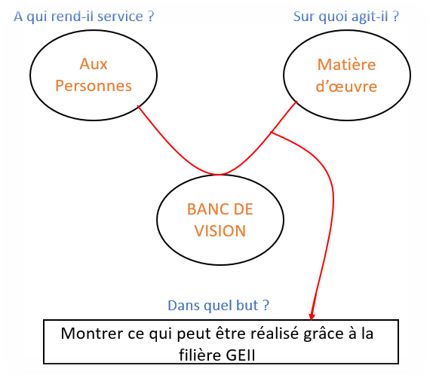
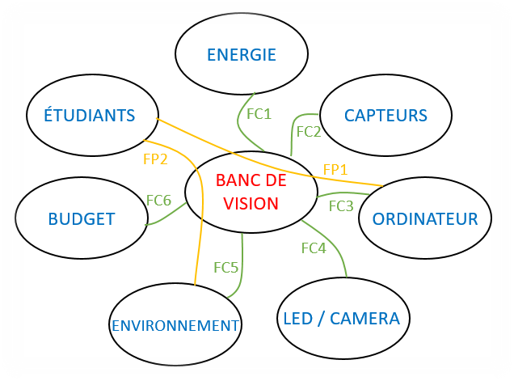
Pour cette étude, nous avons réalisé deux diagrammes : Une bête à corne ainsi qu’un diagramme pieuvre.
3. Modification de la structure
Pour la modification de la structure, nous avons repris une ancienne maquette que nous avons entièrement refait. On a utilisé l’IUT Lab pour « reconstruire » notre structure.
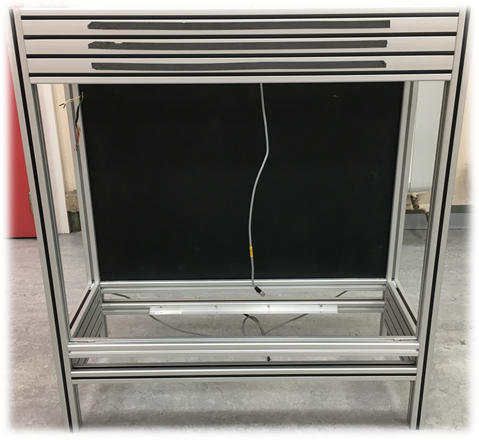

Nous avons découper les barres en aluminium afin de les adapter à une largeur convenable pour notre banc, nous avons également découper les planches, recréer une vraie structure capable de pouvoir accueillir notre tapis roulant.
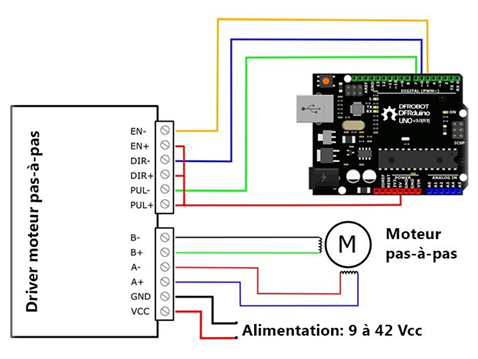
Pour ce qui est du câblage, nous sommes rester sur quelque chose de relativement simple, pour la partie commande, nous avons le driver qui va commander le moteur pas à pas pour l’avance du convoyeur, puis l’arduino qui va permettre de gérer ce driver, les leds et caméras.
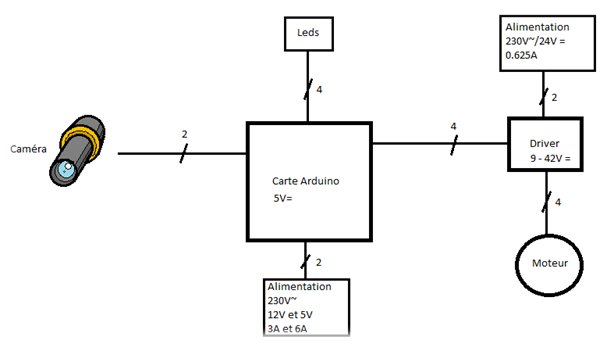
Nous avons ensuite créer un synoptique pour nous aider dans le câblage, relativement simple comme il se compose de deux alimentations, un driver, un moteur pas à pas, un arduino, une caméra et deux bandeaux de leds.
Pour le câblage, nous avions anciennement tout regrouper sur une platine carrée placée sous la structure. Nous avons gardé la même approche sauf que nous avons adapter la platine pour notre structure. On est passé d’un carré à un rectangle et on a aussi enlevé quelques composants du câblage qui ne nous servaient plus.
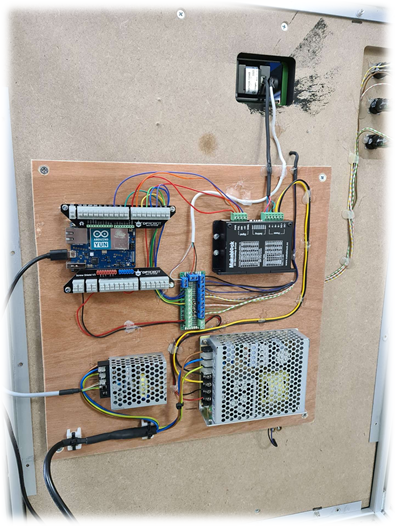

Comme on peut le voir ci dessus, nous avons grandement réduis ce câblage malgré le fait qu’il manque quelques éléments.
4. Modification du Programme
Pour ce qui est du programme, nous voulions garder le même étant donné qu’il fonctionne correctement. Seulement nous voulons changer la partie commande du moteur. Au lieu de gérer le moteur via des boucles on veut gérer ce dernier via les timers de l’arduino. C’est à dire à l’aide d’interruptions.
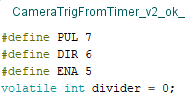
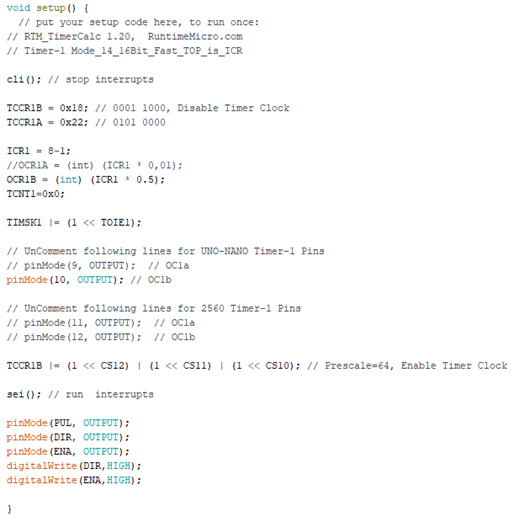
Malheureusement, ce programme ne suffisait pas et ne marchait pas pour gérer le moteur à l’aide d’interruptions.