

Equipe projet :
- Peroche Alexandre (GeII)
- Bauer Victorien (GeII)
- Kevin Schittly (GMP)
- Jonathan Erhold (GMP)
I. Introduction
II. Contexte
Afin de clôturer notre 2e année d’apprentissage, nous avons du choisir une idée de projet à réaliser. Ce projet devait se dérouler sur 60h, avec de groupes de 2 à 4 étudiants composés d’étudiants en GEII et d’étudiants en GMP, le tout sur une période d’octobre 2016 à mai 2017. Etant donné du faible volume horaire, et de la participation du département GMP, il a fallut rapidement s’organiser pour pouvoir travailler efficacement
III. Le cahier des charges
A. Les idées
N’étant pas contraint par les règlements du concours, nous avons pu décider librement de la conception de notre CanSat. Cependant nous nous sommes imposés la contenance minimale, à savoir 1L comme seule règle. Nous nous sommes ensuite sur les points suivants ; notre CanSat devra :
- Etre capable de mesure de de grandeurs physique en temps réel telles que : La Température, la pression, la luminosité, l’accélération, l’humidité, la position
- Avoir une autonomie suffisante pour monitorer les données pendant 3j
- Transmettre les données en temps réel via un application au sol
- Etre capable de supporter des chocs sans impacter les composants embarqués
- Avoir une masse inférieur à 1kg
- Avoir une hauteur maximale de 200mm et un diamètre de 80mm
- Intégrer un parachute dont la masse ne doit pas excéder 1Kg
- Avoir une structure ouverte pour faciliter les mesures des capteurs
- Etre réutilisable
L’ensemble des réflexions peuvent être brièvement résumées par le schéma suivant :

Cependant, nous nous sommes réserver la possibilité d’ajouter des capteurs/modules au cours du projet, comme par exemple la mise en place d’une caméra par exemple.
B. Les solutions
1. Partie GeII
 Le raspberry pi 0. Nous l’avons choisi notamment pour sa taille très réduite et sa consommation minime, parfaite pour concevoir un appareil avec une bonne durée de vie.
Le raspberry pi 0. Nous l’avons choisi notamment pour sa taille très réduite et sa consommation minime, parfaite pour concevoir un appareil avec une bonne durée de vie.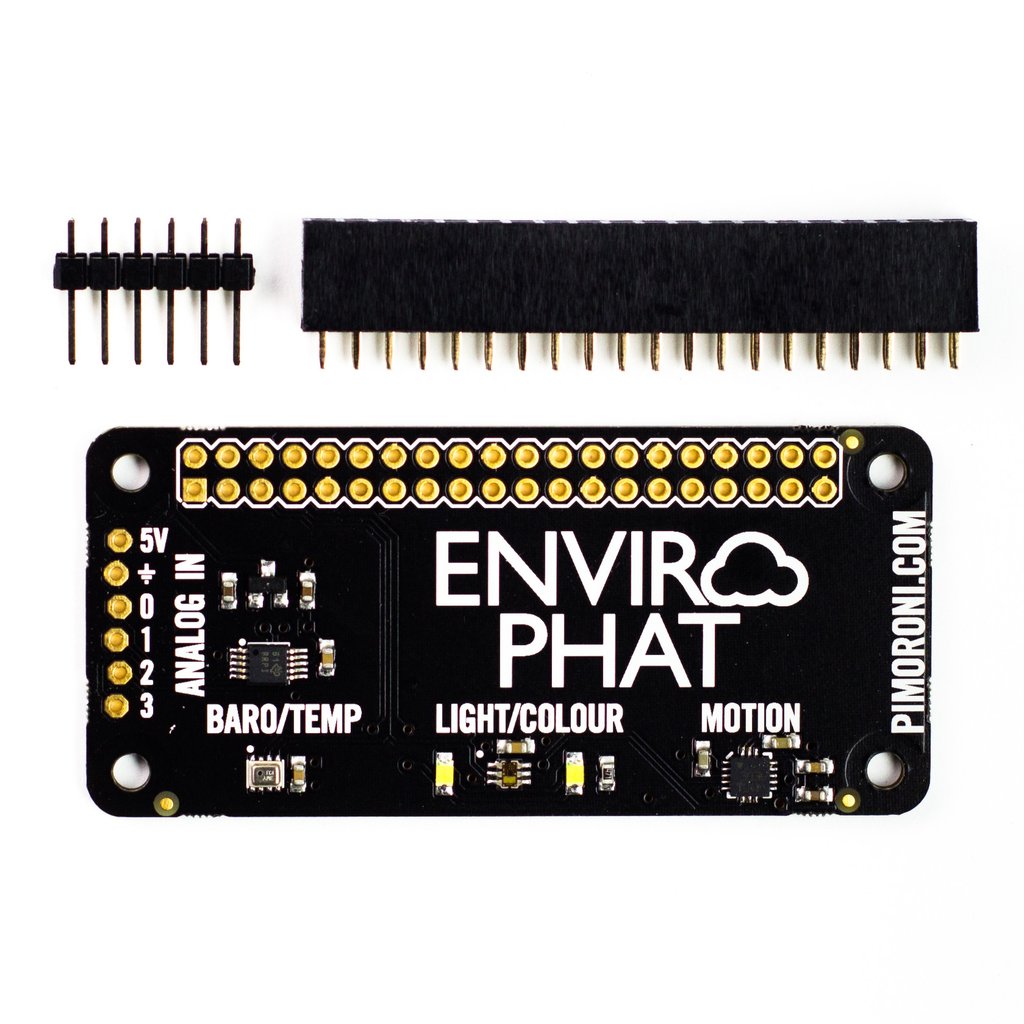 L’enviroPHAT, qui est une carte d’extention du raspberry pi 0. Cette carte rassemble une grande partie des capteurs dont nous avions besoin pour mesurer :
L’enviroPHAT, qui est une carte d’extention du raspberry pi 0. Cette carte rassemble une grande partie des capteurs dont nous avions besoin pour mesurer :- La temperature
- La pression
- La luminosité
- L’accélération

 Une fois configuré correctement, le module xbee permet d’émettre des informations a plus de 1km de portée en simulant une communication série. L’idée était donc d’utiliser 2 modules XBEE : un directement intégrer à la CanSat, et l’autre branché à un PC au sol. Cette installation permet de monitorer les valeurs relevés par la CanSat lorsqu’elle est en fonctionnement. Pour plus de sécurité, la communication est chiffré en AES 256.
Une fois configuré correctement, le module xbee permet d’émettre des informations a plus de 1km de portée en simulant une communication série. L’idée était donc d’utiliser 2 modules XBEE : un directement intégrer à la CanSat, et l’autre branché à un PC au sol. Cette installation permet de monitorer les valeurs relevés par la CanSat lorsqu’elle est en fonctionnement. Pour plus de sécurité, la communication est chiffré en AES 256.
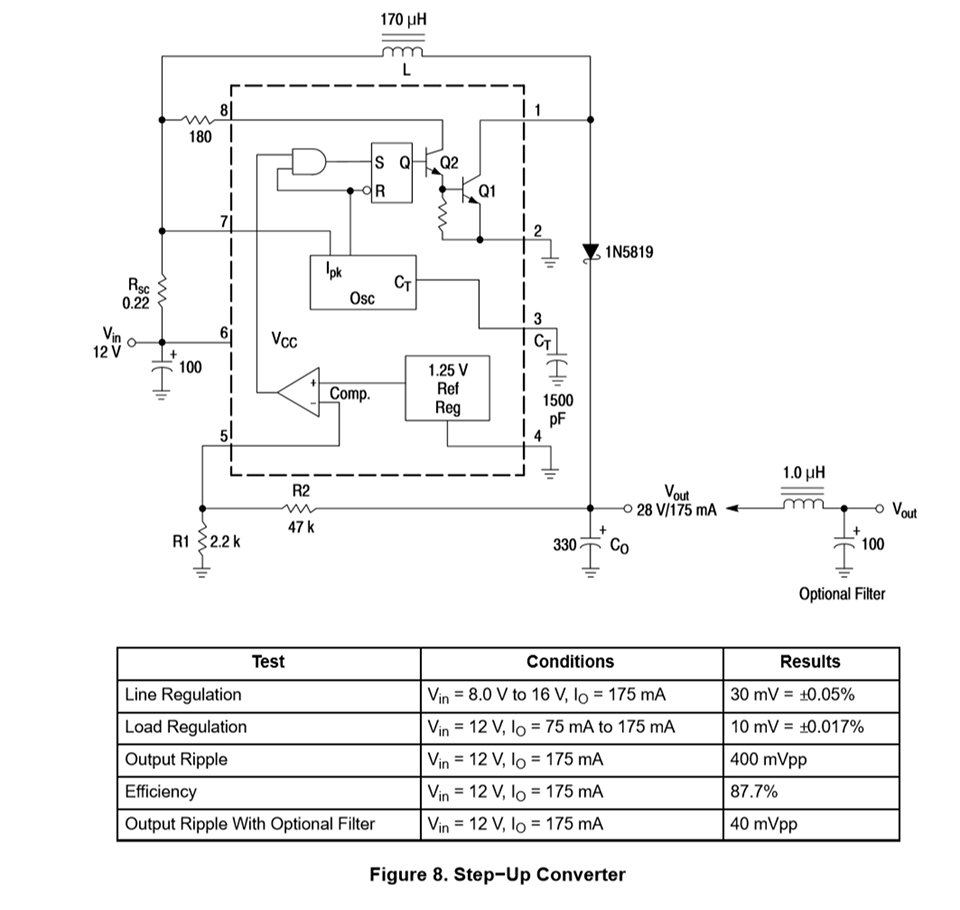
 C’est un hacheur Boost DC-DC pouvant convertir du 3,3V en 7V et du 5V en 9V. Il fonctionne avec de faibles intensité, et permet de centraliser l’alimentation de la CanSat.
C’est un hacheur Boost DC-DC pouvant convertir du 3,3V en 7V et du 5V en 9V. Il fonctionne avec de faibles intensité, et permet de centraliser l’alimentation de la CanSat.2. Partie GMP
Nous avions différents idées pour la conception de notre Can-Sat. C’est pourquoi nous avons tout d’abord échangé nos idées à l’aide de croquis.
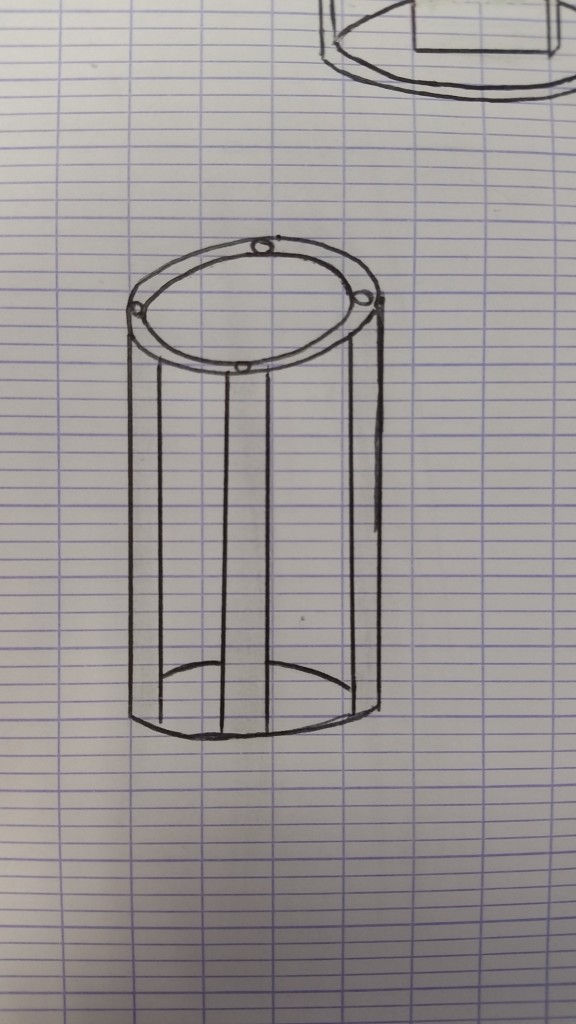
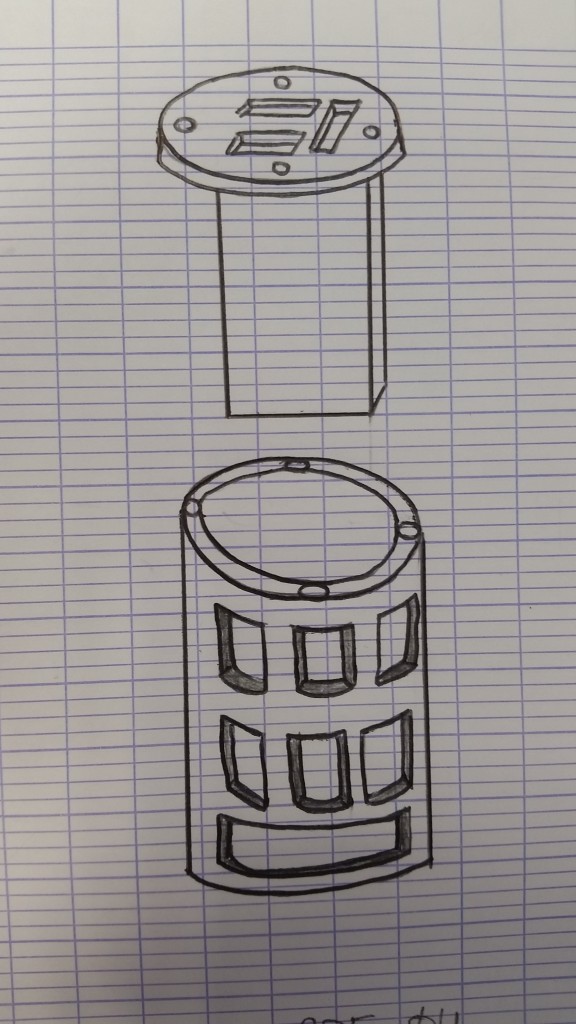
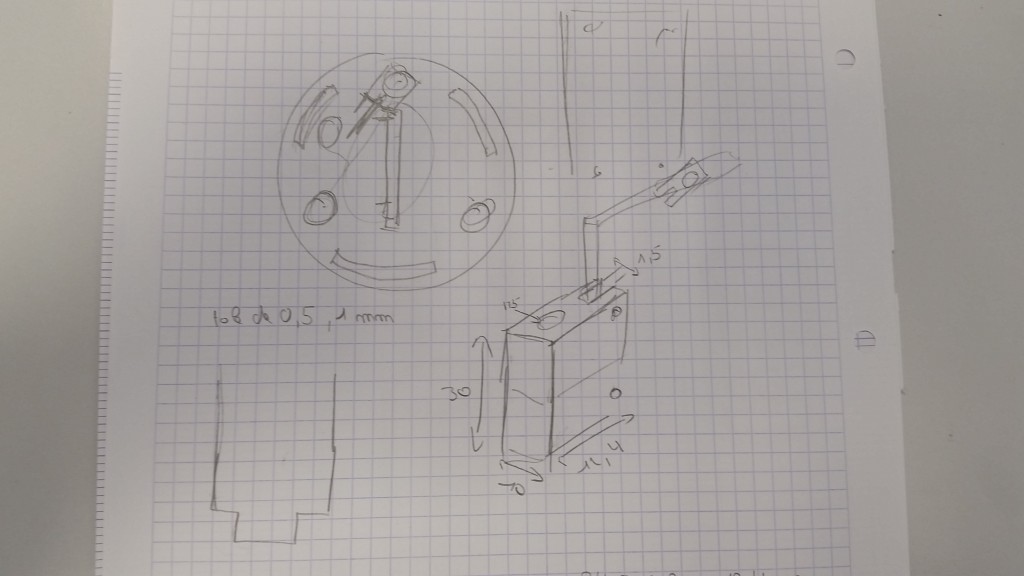
Les solutions 1,2,3 utilisent le même principe. Une partie inférieure en un seul bloque usiné pour avoir un gain de matière. Une partie supérieure avec une platine permettant de fixer le raspberry. Cependant il est très difficile d’usiner ce type de bloc.
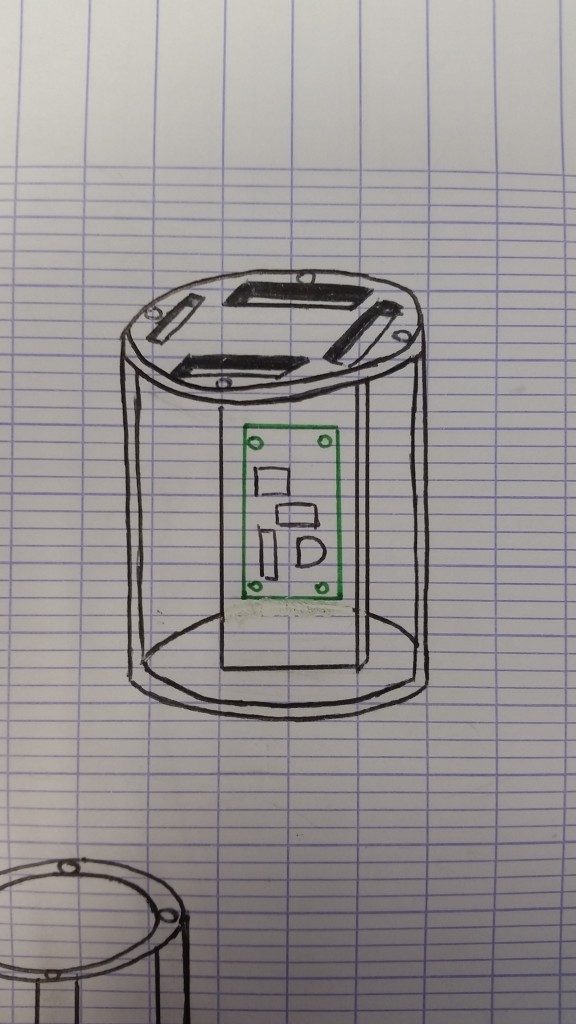
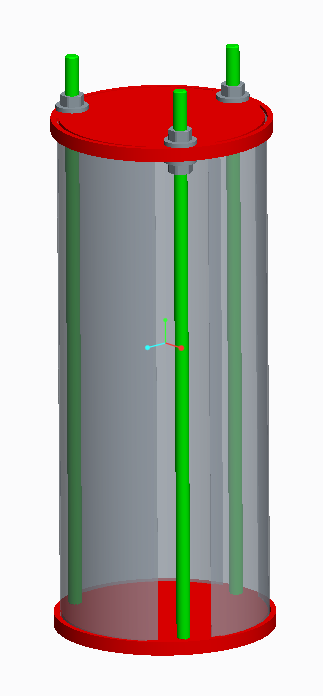
Après discussion entre nous et les professeurs, nous avons choisis la solution 4. Celle-ci est la plus simple à réaliser. Elle est composée de deux platines circulaires, 3 tiges filetées et de support pour le raspberry. Nous avons donc plusieurs petits éléments facile à réaliser, à assembler et modulable.
Voici le modèle 3D de la CanSat :
III. Le développement
A. Partie Electrique
Nous pouvons dégager 2 grandes partie dans la conception du projets :
- La programmation du Raspberry pi et des capteurs environnants
- La conception du Hacheur
B. Partie Mécanique
La conception commence par des croquis pour voir les différentes idées.
Nous avions différentes idées pour la conception de notre Can-Sat. C’est pourquoi nous avons tout d’abord échangé nos idées à l’aide de croquis.
Les solutions 1,2,3 utilisent le même principe. Une partie inférieure en un seul bloque usiné pour avoir un gain de matière. Une partie supérieur avec une platine permettant de fixer la carte électronique. Cependant il est très difficile d’usiné des blocs comme ça.
Après discussion entre nous et les professeurs, nous avons choisis la solution 4. Celle-ci est la plus simple à réaliser. Elle est composée de deux platines circulaires, 3 tiges filetés et de support pour la carte électronique. Nous avons donc plusieurs petits éléments facile à réaliser, à assembler et modulable.
La conception de la CANSAT est terminée, les plans sont en cours de validation pour pouvoir produire nos pièces et ensuite assembler la CANSAT.
Nous avons aussi commencé à chercher des solutions pour la réalisation de notre parachute, mais la conception finale, le dimensionnement et la réalisation du parachute reste à faire.
IV. Remarques et commentaires
[…]