
MICROSCOPE SANS LENTILLE
SOMMAIRE
INTRODUCTION
PROBLÉMATIQUES
STRATÉGIES
COMPOSANTS
CAO
PROGRAMMATION
VIDÉO
CONCLUSION
POUR ALLER PLUS LOIN…
REMERCIEMENTS
INTRODUCTION
Durant notre deuxième année de DUT Génie Electrique et Informatique Industrielle nous devions effectuer un projet d’étude et réalisation. Nous avons choisi de réaliser un microscope sans lentille à l’aide d’un Raspberry Pi 3. Pour mener à bien se projet nous étions encadrés par deux professeurs, Mr Verrier et Mr Bazeille et notre équipe était composée de la manière suivante :
- Arthur Gasser – Chef de Projet
- Quentin Dijoux – Responsable Programmation
- Raphaël Jimenez – Responsable Conception Assistée par Ordinateur
Notre microscope devait impérativement être réalisé en utilisant un Raspberry Pi 3 et nous devions le créer à l’aide d’une Conception Assistée par Ordinateur (CAO). Il nous a donc tout d’abord fallut apprendre les bases de la programmation Linux, Unix et de l’univers Raspberry en général. Mais nous avons également dû approfondir certaines notions concernant le domaine de l’optique pour pouvoir dimensionner notre microscope de manière optimale. La capture de l’image zoomée se fait à l’aide d’une RaspiCam Noire V2 et peut être visualisée sur un écran LCD et l’éclairage se fait à l’aide d’un module de leds SenseHat.
Nous avons commencé ce projet le jeudi 30/11/2107 et nous l’avons achever le lundi 22/01/2108. La réalisation d’un microscope géré électroniquement nous intéressait tout particulièrement car les différents aspects de conception et de programmation étaient nouveaux pour nous. Mais ce projet faisait appel à d’autres notions intéressantes comme l’holographie par exemple.
PROBLÉMATIQUES
Comment programmer efficacement le microscope pour qu’il soit simple d’utilisation ?
Comment dimensionner rigoureusement la CAO pour que les zooms effectués par le microscope soient suffisamment conséquents et nets ?
Nous voyons ressortir ici les deux points principaux de notre projet : CAO et Programmation.
STRATÉGIES
Ce projet était assez conséquent tant au niveau de la charge de travail qu’au niveau de la difficulté. Nous avons donc relevé le challenge en donnant le meilleur de nous même ! Nos points forts étaient notre motivation et notre bonne répartition des rôles. Nous avons également essayé de communiquer régulièrement avec nos professeurs encadrants afin qu’ils soient tenus au courant des avancements de notre projet et pour qu’ils puissent nous conseiller au mieux.
Nous avons tout d’abord réalisé le cahier des charges fonctionnelles accompagné de différents diagrammes pour bien commencer le projet. Puis nous avons effectué les différentes recherches nécessaires afin de pouvoir démarrer la programmation de la caméra et des leds. Ensuite nous avons étudié un certains nombres de documents afin de pouvoir calculer la future résolution de notre microscope qui nous a permis de le dimensionner et nous avons rédigé les différents documents accompagnant notre projet tout au long de celui-ci. Plus notre projet avançait, plus il était complexe, il a donc fallut travailler en dehors des heures prévues pour les études et réalisations, lors de nos temps libres.
Nous vous invitions à télécharger le PDF suivant afin de visualiser nos différents diagrammes qui nous ont permis de démarrer le projet dans les meilleures conditions possibles (Bête à cornes, MindMap, Pieuvre, Ligne des temps).
COMPOSANTS
Notre microscope est constitué de plusieurs éléments, nous allons vous les présenter brièvement. Les caractéristiques électroniques de ces composants sont détaillées dans notre Cahier des charges techniques disponible en bas de page.
- RASPBERRY PI 3 Modèle B
C’est le cœur de notre microscope. En effet cette carte contrôle notre écran, nos leds ainsi que notre caméra. L’entièreté de la programmation a été réalisé sur ce Raspberry et toutes les informations sont centralisées à l’intérieur de ce dernier.

- ECRAN LCD
Cet écran tactile permet de visualiser les images récupérées à l’aide de notre microscope. Il rajoute énormément de confort car il est possible de travailler directement avec le microscope sans avoir besoin d’être à proximité d’un autre écran. Cependant, travailler sur un écran plus grand reste plus confortable sur le long terme.


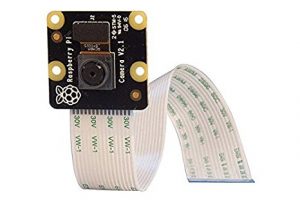
- RASPICAM NOIRE V2
Cette caméra nous permet de capturer nos images zoomées. Elle est de très bonne qualité mais dans le cadre de notre application, comme le nom de notre projet l’indique, nous avons été amené à retirer la lentille présente sur la caméra. Cela est indispensable pour pouvoir réaliser les zooms des images.
- SENSEHAT
Cette petite carte contient un module leds compatible avec Raspberry, voilà pourquoi nous l’avons choisi pour réaliser l’éclairage dans notre microscope. Ces leds sont pratiques à utiliser et assez simples à programmer. Cependant, le flux lumineux qu’elles délivrent est assez faible. Il est possible d’augmenter la qualité de notre microscope avec des leds plus puissantes.

- CARTE SD
Nous réalisons des captures ainsi que du traitement d’image, ces opérations sont assez lourdes niveau mémoire. Nous avons donc du ajouter une carte SD de 16go compatible avec Raspberry pour éviter tout problème et pour mener à bien notre projet.

- ÉCHANTILLON
Enfin, comme dans tout microscope, il faut un échantillon à observer. Comme pour les microscope classique nous observons des échantillons présents sur de simples lames standards.

CAO
L’un des points principaux de notre projet était de réaliser une CAO (Conception Assistée par Ordinateur) pour créer notre microscope. Pour cela, nous avons utilisé le logiciel Tinkercad, qui était le plus pratique dans notre cas car c’est un logiciel en ligne, nous pouvions donc travailler chez nous et sur tous les PC de l’IUT (voici un lien vers le site Tinkercad).
Pour une question de praticité, nous avons décidé de réaliser notre microscope en plusieurs pièces pour faciliter le montage ainsi que la maintenance. Dans cette partie, nous allons vous présenter chacune des pièces en détail.
- SOCLE
Commençons par la base de notre microscope. Ce socle a été conçu afin que la caméra et surtout le capteur soit au milieu du microscope. Il y a également un chemin de câble qui passe en dessus pour que la nappe de la caméra soit protégée et pour la connecter directement au Raspberry de manière efficace. Le Raspberry et l’écran sont donc placés sur la partie avant du socle (la plus grande) pour des questions de confort.
- MURS/ÉCHANTILLON
Sur ce socle, vient la partie qui permettra d’accueillir l’échantillon. Cette pièce est constituée de 4 murs et sur deux de ces murs, il y a une fente permettant d’introduire l’échantillon dans le microscope à l’aide de la pièce que nous allons voir tout de suite.
- SUPPORT/ÉCHANTILLON
On place l’échantillon sur cette pièce puis on l’introduit dans le microscope. Tout a été étudié pour que le support soit maintenu par les deux fentes vues précédemment. Cette pièce est de cette forme car l’échantillon ainsi que la lumière doivent arriver jusqu’au capteur située juste en dessous.
- PROTECTION
Pour que notre écran et notre Raspberry soient protégés contre les chutes. Nous avons réalisé cette pièce permettant de les caler. Sur cette pièce nous avons également réalisé deux trous pour laisser passer les câbles provenant du SenseHat et de l’alimentation mais aussi pour brancher le clavier, la souris et un câble HDMI. Nous avons aussi placé le logo de l’IUT ainsi que nos noms sur le dessus de la pièce.
- PINHOLE
Cette pièce est entièrement pleine. Mais en son centre, il y a le trou appelé « pinhole » permettant de laisser passer la lumière. Sa taille a été étudiée afin que le phénomène de diffraction soit respecté, nous verrons les détails des phénomènes physiques dans la dernière partie de ce document.
- FOCALE
Afin que le flux de lumière soit plus conséquent, nous avons ajouté une focale pour concentrer la lumière en un seul point. Cette pièce est donc constituée d’un trou permettant de fixer parfaitement la focale au centre.
- LEDS/TUYAU
Notre module de leds sera fixé sur cette pièce, nous avons percé un trou afin de laisser passer les câbles du SenseHat. Ces câbles passeront ensuite dans le tuyau et descendront jusqu’au Raspberry.
- TOIT
Voici la dernière pièce de notre microscope. Il s’agit d’un cube permettant de refermé le montage. Sur cette pièce nous pouvons voir le nom de notre microscope « μSCO-Pi 3D » ainsi que notre logo.
La CAO était une étape très importante du projet, nous avons donc consacré beaucoup de temps pour la réaliser de la manière la plus précise, esthétique et ergonomique. Cependant, le rendu final présentait quelques erreurs de précision que nous avons tenté de corriger au mieux. Nous avons dû peindre notre microscope en noir pour empêcher la lumière extérieure de gêner notre acquisition. Nous avons utilisé l’imprimante 3D (résine) de l’IUT Lab, nous souhaitons donc remercier Mr De Sabbata pour son aide.
Nous vous invitions à télécharger notre Cahier des charges techniques (CDCT) en bas de page dans la rubrique « Pour aller plus loin… » afin de visualiser nos différentes pièces ainsi que le microscope fini sur Tinkercad et après impression.
PROGRAMMATION
La programmation de notre microscope est réalisée en Python 3. Avant ce projet, nous n’avions aucune connaissance en Python et en Linux, nous avons donc dû nous adapter et apprendre ces différents langages. Nous souhaitions que notre microscope puisse être utilisé par tout le monde, c’est pour cela que nous avons annoté chacun de nos programmes. Nous utilisons trois programmes principaux et nous allons détailler leur contenu.
- ACQUISITION
La programmation de notre microscope est réalisée en Python 3. Avant ce projet, nous n’avions aucune connaissance en Python et en Linux, nous avons donc dû nous adapter et apprendre ces différents langages. Nous souhaitions que notre microscope puisse être utilisé par tout le monde, c’est pour cela que nous avons annoté chacun de nos programmes. Nous utilisons trois programmes principaux et nous allons détailler leur contenu.
- RECONSTRUCTION
La capture étant réalisée, il faut maintenant améliorer le rendu de celle-ci. Pour cela veillez cliquer sur le bouton « Reconstruction 2D » afin de lancer le programme correspondant. Ce dernier va réaliser une mise au point numérique à l’aide d’un recalage de pixel. Pour cela, il faut utiliser plusieurs FFT (Fast Fourier Transformer). Ces différents termes peuvent paraître compliqués mais en visualisant la photo une fois reconstruite vous allez très vite comprendre son impact sur l’image que vous avez prise précédemment. Une fois la reconstruction terminée vous pouvez analyser votre image.
- ANALYSE
Pour ouvrir ce programme il vous suffit d’appuyer sur le bouton correspondant. Une fois le programme lancé, vous pouvez réaliser un certains nombres d’actions :
- Contouring
- Zoom
- Déplacement
- Annotation
- Sauvegarde
- …
Pour accéder à ces différentes actions, il vous suffit de lire les instructions présentes sur votre écran.
Vous pouvez retrouver tous nos codes en téléchargement dans la rubrique « Pour aller plus loin… » en bas de page.
VIDÉO
Dans le cadre du projet nous avons du réaliser une vidéo résumant l’entièreté de celui-ci. Nous n’avons pas réalisé une vidéo classique, en effet, nous avons utilisé une macro sur PowerPoint afin de transformer ce dernier en vidéo full HD puis nous avons rajouté nos voix ainsi qu’une musique en fond. Cette vidéo est disponible juste ici, nous vous invitons à la visionner.
CONCLUSION
Malgré le manque de connaissance, nous nous sommes adaptés très rapidement à l’univers Raspberry. Nous avons réussi à créer un programme assez simple d’utilisation ainsi qu’un CAO précise, nous avons atteints nos objectifs. Nous sommes globalement très satisfaits du rendu final de notre microscope. Le projet était assez complexe mais nous avons redoublé d’effort pour le mener à bien. Nous arrivons à obtenir des images zoomées avec une résolution et une précision correctes. Nous aurions cependant pu avoir de meilleurs résultats avec une source de lumière plus adaptée à la situation et un pinhole plus petit (ce qui était difficilement réalisable). Et avec plus de temps, nous aurions aimé réaliser, en plus de la reconstruction 2D, une reconstruction 3D de nos images mais c’est encore un autre niveau de difficulté.
Mais notre microscope n’est pas encore dans son état final puisque Mr Verrier continuera à travailler sur celui-ci et l’utilisera lors de divers présentations ou événements.
POUR ALLER PLUS LOIN…
Afin que notre projet soit plus complet et plus détaillé, nous avons rédiger plusieurs documents. Si notre projet vous a intéressé, nous vous invitons à les télécharger. Les différents programmes que nous avons réalisé sont également en téléchargement.
- Cahier des charges fonctionnelles
Indispensable au bon démarrage du projet, ce cahier des charges définit les différents cadres et objectifs de celui-ci. Il permet de partir dans la bonne direction et de vérifier si tous les membres de l’équipe ont la même vision des moyens à mettre en œuvre pour accomplir les objectifs.
- Cahier des charges techniques
Ce document récapitule les fonctions des composants que nous avons utilisé, la manière dont nous avons effectué notre CAO, les différents calculs de dimensionnement que nous avons du faire et aussi un résumé de la partie programmation.
- Guide d’utilisation et d’installations
Ce guide vous permet de comprendre comment utiliser notre microscope étape par étape mais il vous explique également comment installé les divers logiciels que nous avons installé sur notre Raspberry.
- Rapport de nos séances
Ce document permet de visualiser l’avancement de notre projet au fur et à mesure de nos séances de travail.
REMERCIEMENTS
Nos professeurs encadrants pour leurs aides et leurs conseils.
L’IUT ainsi que l’IUT LAB de Mulhouse pour le budget et l’apport de matériels.

![]()
