
Remerciements
Nous voudrions premièrement remercier M. MERCKLE, notre professeur d’Etude et Réalisation qui nous aura de nombreuse fois aidé dans ce projet. Mais également M. De SABBATA sans qui nous n’aurions pas eu accès aux outils nécessaire pour réaliser ce projet. Et enfin M. VERRON qui nous aura lui aussi grandement aidé lors de la réalisation des circuits imprimés.
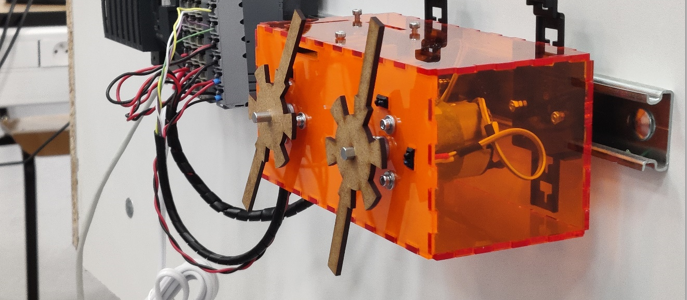
La finalité de ce projet est de permettre le contrôle de 2 moteurs Courant Continu à partir d’une visualisation sur un ordinateur.
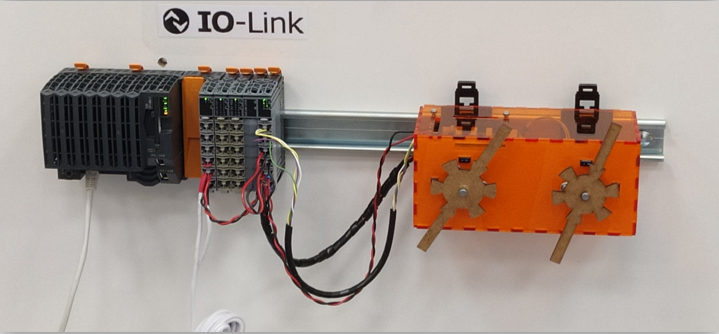
Figure 1: Système final
Voici le cahier des charges de ce projet :
- Etudier la borne moteur ainsi que les capteurs.
- Réaliser un schéma de la maquette
- Choisir et commander le matériel manquant (s’il y en a)
- Elaborer un programme test
- Développer une application complète.
Matériel
Pour réaliser ce projet, voici le matériel que nous avions à disposition :

Maquette
L’objectif premier étant la réalisation de la maquette (sans celle-ci, impossible de pouvoir effectuer le moindre test), il était donc impératif de la commencer le plus tôt possible.
Nous avons alors réalisé une première maquette pour supporter les moteurs, ainsi que souder des câbles aux moteurs afin de permettre leur connexion à l’automate.
Programmation
Dans ce projet, la programmation a pour but d’apporter à l’utilisateur une interface de commande
fiable, ergonomique et intuitive.
La première étape était le design de la visualisation
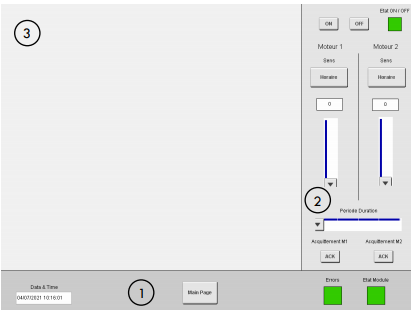
menu principal.
Elle montre également les erreurs de
surintensité potentielles, l’état du
module et également la date et heure
actuelle.
2 : Il est possible de commander les
moteurs à partir de ces boutons,
sliders, et champs d’entrées.
3 : La représentation physique des
moteurs est visualisable dans cet
espace. Par soucis de temps il n’a pas
été possible de développer cette
fonctionnalité, elle reste cependant
La visualisation devra supporter plusieurs types de commandes :
- Une commande manuelle permettant de contrôler chaque moteur indépendamment par
modulation d’impulsion (PWM) avec en plus, la possibilité de choisir le sens de rotation. - Une commande temporelle, capable de faire tourner chaque moteur pour un temps donné (en
utilisant pour base de temps celle de l’automate) - Une commande asservie qui utilisera des capteurs de proximité pour détecter le nombre de tours
que fera chaque moteur.
Electronique
La partie électronique du projet à pour rôle d’assurer le bon fonctionnement de la maquette et
de permettre une utilisation fiable.
L’électronique est elle-même répartie en deux parties :
- Motorisation
- Capteur
Motorisation
La motorisation s’articule autour des deux moteurs et des ports de contrôle du module
automate. Chaque moteur à une tension d’alimentation de 24V et un courant absorbé à vide d’environ 80mA, le module automate ayant une limite de courant de 3,5A par moteur, le système aurait été capable normalement d’actionner les moteurs sans difficulté.
Toutes fois, en raison du pique de courant demandé par les moteurs au démarrage, il nous était impossible de lancer les moteurs (Voir Problème Rencontrés).
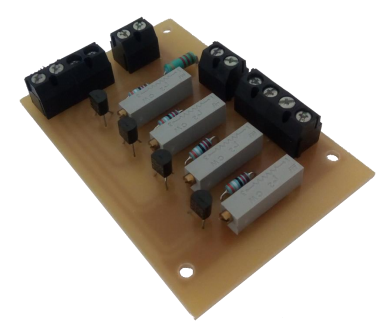
Pour résoudre ce problème, nous avons alors connecté une résistance de 5,6Ohm en série de chaque moteur pour réduire le pique de courant et ainsi permettre le démarrage des moteurs.
Capteur
Les capteurs ont pour but de retourner les informations sur la position/Vitesse des moteurs à la manière d’un encodeur et/ou codeur incrémental.
Nous utilisons pour ce projet des capteurs Infra-RougeIR (TCRT5000L) ainsi que des disques amovibles ayant une découpe particulière suivant la manière dont on veut se servir des capteurs (position initial,
vitesse, sens, …).
Conclusion
Atteinte des objectifs
La date de fin de projet étant maintenant passée, il était essentiel de faire un point entre les attentes et la réalisation effectuée.
En reprenant depuis le début, l’étude de la borne moteurs ainsi que celle des capteurs a été une grande réussite car sans cette étape, nous n’aurions pas pu aller aussi loin.
La structure physique du projet (support + électronique) a elle aussi été une réussite. Cette structure permet d’obtenir une grande facilité d’utilisation, de plus, son côté modulable permet de remanier ce projet dans son entièreté, il est donc très aisé de rajouter des composants ou modules afin d’ajouter de nouvelles fonctionnalités.
Pour finir, il reste l’aspect software (programmation + interface utilisateur). Tout n’a pas pu être entièrement complété, comme la détermination de la vitesse de chaque moteur, ou bien la représentation de la position et rotation sur la visualisation. Cependant, les objectifs clés, tels que la commande manuelle, temporelle ou bien asservie ont, eux, été réalisé.
Ce projet n’aura donc pas été réalisé à 100% mais une grande majorité aura elle, bien été faîtes. Ces quelques éléments manquants pourront par la suite faire place à une phase d’amélioration de ce projet.
Améliorations
Nous avons jusqu’ici réalisé une grande majorité de nos objectifs. Cependant, il reste de nombreuses améliorations à apporter à ce projet.
La maquette a été conçue de sorte que chaque moteur puisse être utilisé avec 2 capteurs. Il est donc désormais possible de déterminer la vitesse de rotation d’un moteur et de l’afficher sur une page de la visualisation. On pourrait également créer une nouvelle commande de moteur avec cette fois la vitesse pour ordre.
Sur les visualisations déjà créées (Voir Figure 3) on retrouve un emplacement central destiné à représenter la position et rotation en temps réelle des moteurs. Par soucis de temps, cet objectif n’aura
pas été atteint mais peut néanmoins servir d’améliorations à ce projet.
Et enfin, l’amélioration la plus ambitieuse, serait la conception puis réalisation d’un bras robotisé a 2 axes de rotation. Ce bras permettrait le déplacement sur axe à 2 dimensions. Il pourrait par exemple
tenir un marqueur et dessiner sur un support que ce soit par commande manuelle ou bien par une succession d’instructions prédéfinies.