

Introduction
Pour le projet d’ER du semestre 4, notre groupe a décidé de choisir comme thème l’exploitation de moteurs pas-à-pas, notamment via une maquette qui reprend la réalité des équipements en industrie.
Cette maquette est composée uniquement d’équipements industriels de marque B&R, une marque proposant des équipements d’automatisme et de supervision industrielle.
Elle permet dans un milieu éducatif, d’apprendre le fonctionnement d’un automate et, dans un milieu industriel, de contrôler des équipements, tout en offrant une mobilité élevée. Elle est composée d’un IHM (Interface Homme Machine) qui permet de créer un lien entre l’Homme et la Machine pour que l’Homme puisse contrôler et surveiller la Machine, d’un variateur qui sera l’intermédiaire entre l’IHM et les équipements, de boutons, d’un moteur PAP intégré et un capteur RFID.
Buts du projet
Exploiter au maximum les capacités des équipements de la maquette, pour pouvoir utiliser toutes ses fonctionnalités, et qu’elle puisse contrôler des moteurs PAP.
On cherche à comprendre les différentes chose qui puissent être faites avec la maquette, et comprendre comment contrôler les môteurs fournis.
Description des équipements hors maquette
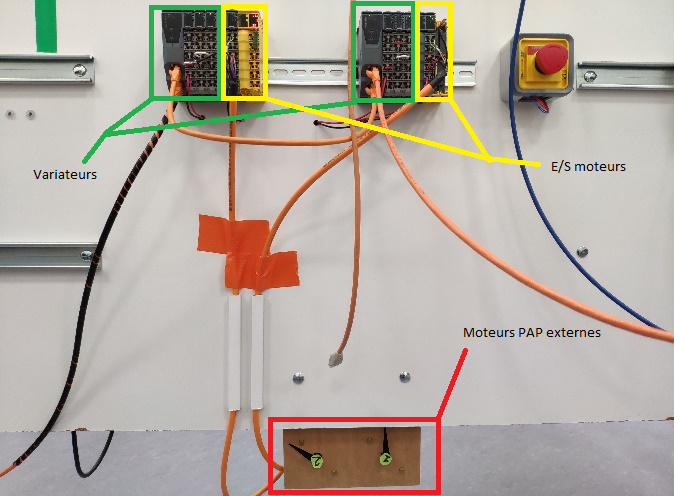
Dans notre cas, nous avons dû utiliser des équipements externes à la maquette pour pouvoir exploiter la maquette au maximum. Nous disposons donc de 2 moteurs pas à pas externes.
Exploitation d’un moteur PAP via logiciel Automation Studio
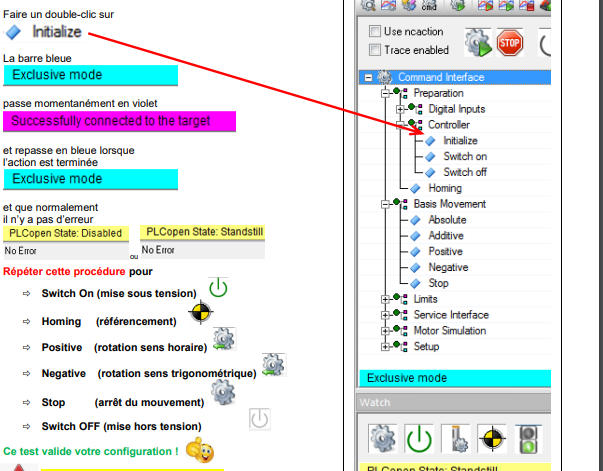
Une fois que le variateur est mis en place et qu’il est bien relié au moteur il est possible d’effectuer un test afin de verifier qu’il n’y ait aucun problème avec ces derniers. Pour ce faire, il faut s’assurer que la CPU soit bien en mode RUN. Une fois que tout est prêt, il suffit d’être dans le centre de test afin de voir le bon fonctionnement de toute l’installation.
v
Une fois la phase de test faite, l’ajout de la librairie qui permet la programmation du moteur grâce à un bloc de fonction. Ce dernier contient toutes les variables permettant d’effectuer une action grâce au moteur.
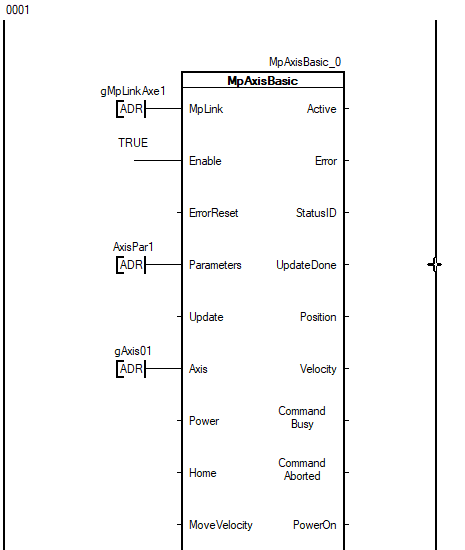
Le moteur est donc controllé via des variable comme Update, MyVelocity, Home… COntenues dans la librairie.
Exploitation du moteur intégré
Tout d’abord nous avons voulu exploiter le moteur pas à pas présent sur la maquette. Nous n’avons réussi que à faire tourner le moteur partiellement : le moteur ne tournait pas continuellement.

Ceci est un problème auquel nous n’avons pas pu remédier.
Le problème provient des paramètres du moteur dans le logiciel Automation Studio, car le moteur se déplace avec des positionnements angulaires, et ce type de position nécessite plus de paramétrages, que nous n’avons pas pu faire.
Automate à partir d’un automate
Nous avons alors décidé avec l’aide et l’autorisation de Mr MERCKLE de relier le variateur de la maquette à deux autres variateurs qui sont externes à la maquette. Les modules E/S des deux variateurs sont chacun liés à un moteur.
Voici une capture du système vu sur logiciel :
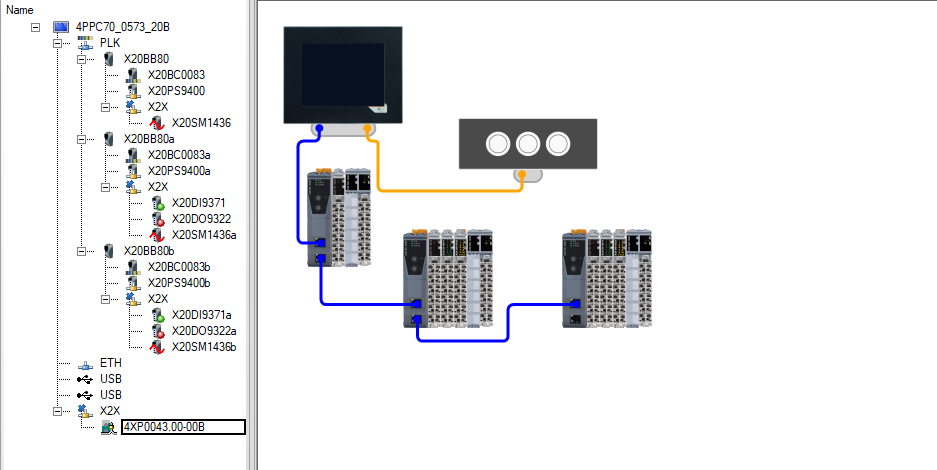
Il faut faire attention à ne pas oublier d’insérer les variateurs, les modules E/S, les moteurs PAP, ainsi que les librairies pour chaque moteur (nous avons pu les ajouter à l’aide du tutoriel de MERCKLE).
Exploitation des boutons
Afin d’exploiter au maximum le module, nous avons décidé dans un premier temps d’ouvrir les pages de chaque moteur et une page générale avec les 3 boutons physiques. Cependant, il était impossible, car les fonctionnalités du module restaient un minimum limité.
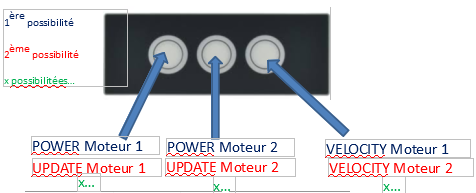
Pour exploiter tout de même les boutons, nous avons décidé de donner comme utilité aux boutons, le contrôle des équipements. Il y a de nombreuses possibilités (en fonction des équipements) dans notre cas (moteur PàP), car à l’aide des boutons nous pouvons faire de nombreuses actions : changer de direction, allumer le moteur, lancer la rotation du moteur, Remettre à 0 la valeur de la position, actualiser les valeurs des variables moteurs (UPDATE), etc…
Voici un schéma démonstratif des nombreuses possibilités :
Simplification de l’interface
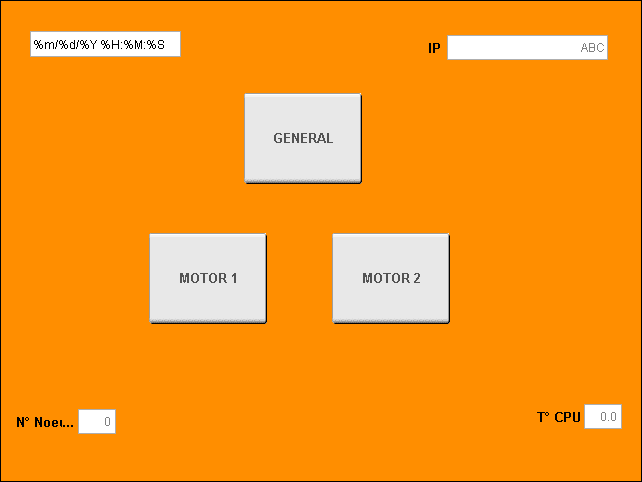
our pouvoir utiliser simplement et efficacement le moteur, nous avons mis en place une interface avec 4 pages au total :
– 1 page d’accueil avec bouton Général et Moteur 1/2
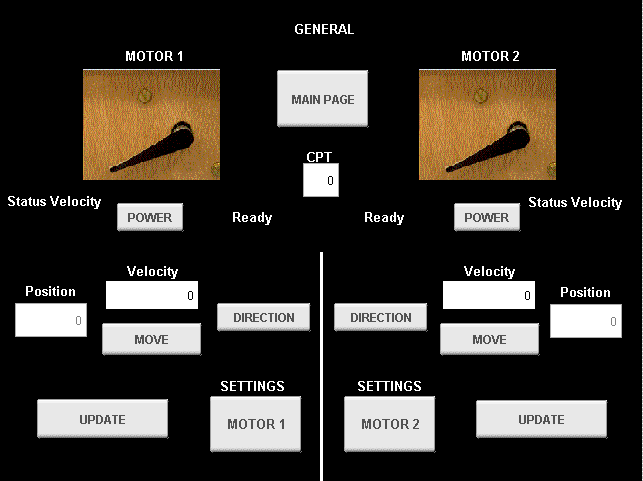
– 1 page générale (ensemble des moteurs)
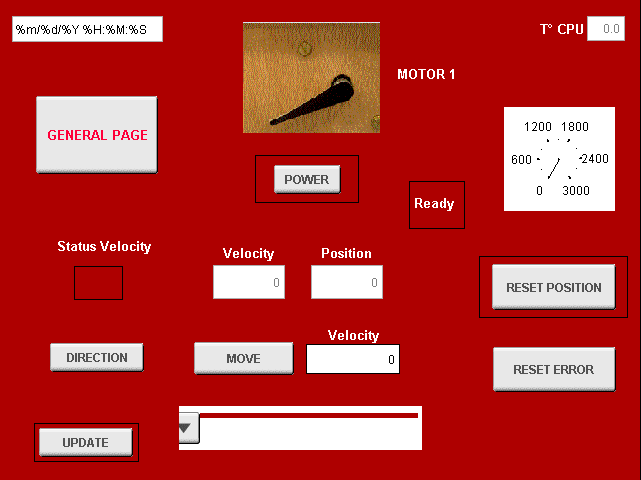
– 1 page pour chaque moteur et toutes leurs fonctionnalités.
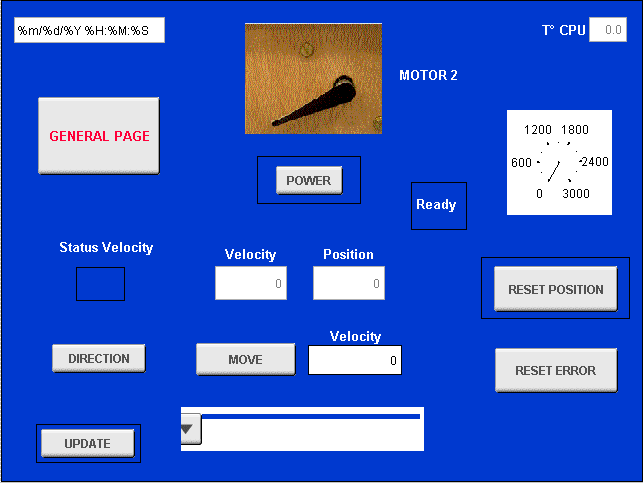
Les boutons entourés d’un rectangle noir ont un voyant qui peut s’illuminer de 2 couleurs : Rouge si une variable n’est pas à jour ou n’est pas prête, et Vert si une variable est à jour ou prête.
Exemple 1 : Si le moteur est allumé, le cadre du bouton POWER sera Vert. Si le moteur est éteint, le cadre sera Rouge.
Exemple 2 : Si la position est remise à 0 en cliquant sur RESET POSITION, le cadre de ce bouton sera Vert, sinon ce sera Rouge.
Dans notre cas, les variables UPDATE (qui actualise les valeurs de la variable) sont affectées aux boutons physiques, comme dans l’exemple du schéma dans la partie « Module de boutons ».
Support de maquette sur-mesure
Pour utiliser confortablement la maquette, nous avons crée un support sur-mesure afin de consolider l’ensemble et de le transporter sans s’inquiéter d’abimer un câble ou un composant.
En effet, les câbles lorsque la maquette est posée sur une surface plate, se frottent contre celle-ci, et avec le temps, risquent de s’abimer et donc de causer des problèmes sur le fonctionnement global de la maquette.
Le support permet de tenir la maquette inclinée, offrant une meilleure vue de l’ensemble et principalement de l’IHM.
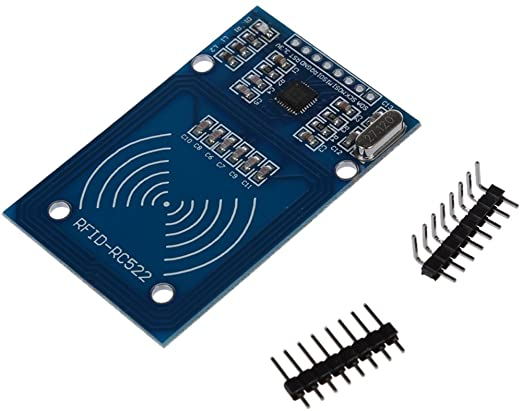
Capteur RFID
Ce capteur aurait donné d’autres fonctionnalités à cette maquette : possibilité de se connecter à un utilisateur précis via ce capteur, activer ou désactiver le mode Manuel, allumer/éteindre les moteurs, faire office d’arrêt de secours, etc…

Nous pouvions exploiter le capteur RFID, pour permettre seulement aux utilisateurs munis d’un badge à induction, d’utiliser l’interface de la maquette.
Mais malheureusement nous ne disposions pas de badges à induction lors de la réalisation de notre projet.
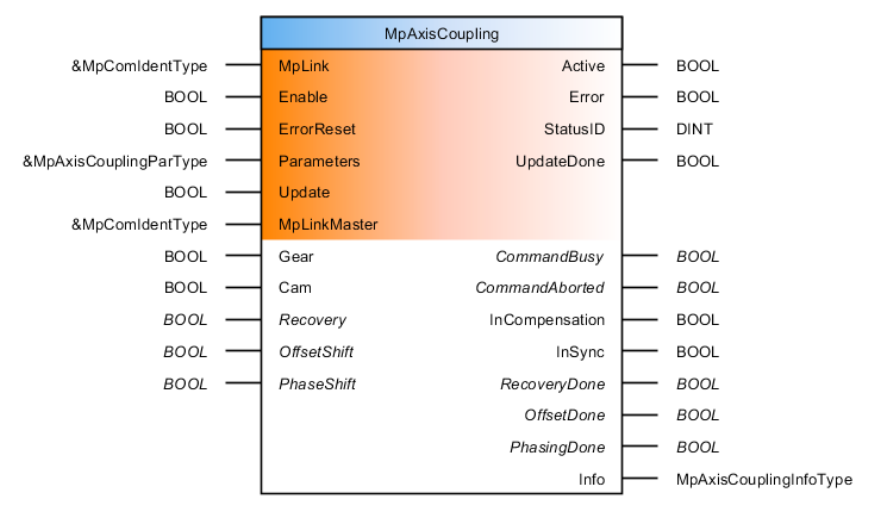
Couplage des deux moteurs
Capture d’un bloc fonction permettant le couplage des moteurs Les 2 moteurs tournant individuellement, montrent le bon fonctionnement de ces derniers. Suite à cela, une nouvelle exploitation aurait pu être faite : Le couplage des moteurs. Cela consiste à faire tourner un des moteurs grâce à la rotation effectuée par l’autre.
Plus précisément, lorsque le premier moteur dit « Moteur maitre » est en rotation grâce à la programmation d’un bloc de fonction prévue pour le couplage des deux, le deuxième dit « Moteur esclave » sera entrainé par la rotation du premier. La programmation de ce bloc permettrait de choisir les sens de rotation du deuxième moteur en fonction du premier.
Avec les bonnes valeurs le premier moteur pourrait faire tourner le deuxième moteur dans le même sens, ou bien dans le sens opposé.
Conclusion
Le but de ce projet étant d’exploiter un maximum la maquette, nous avons pu en exploiter 70%. Les exploitations éventuelles comme celles du couplage, et le changement de pages avec les boutons physiques auraient peut-être été faites avec légèrement plus de temps.
Avec une recherche plus détaillée et plus d’éléments, une exploitation du capteur RFID aurait pu être faite, mais le résultat final est que l’on connaît son utilité et son fonctionnement, et que sa mise en place du aurait certainement été rapide.
Nous tenons a remercier comme il se doit Mr. MERCKLE pour son soutien et son apport de connaissance qui nous a énormément aidé à mener à bien ce projet, et Mr. DE SABBATA pour l’aide à l’IUT Lab lors de la réalisation de la maquette.