
Table Interactive
Giudilli – Merimeche – Vessot – Binder
SOMMAIRE
- Phase d’étude
- Présentation du projet
- Matériel en possession
- Répartition des tâches
- Recherche de matériel
- Conception du prototype
- Conception de la table
- Phase prototypage
- Réalisation du prototype
- Polissage du polycarbonate
- Connections des LEDs avec des fils
- Connections des LEDs avec des PCB
- Fabrication de la surface de couplage
- Assemblage
- Phase réalisation
- Réalisation de la table
- Soudure des LEDs
- Programmation
- Jeux
- Démonstration
- Améliorations possibles
Introduction
Lors de notre deuxième année de DUT GEII, nous avons proposé nous-même un projet à nos professeurs. C’est ainsi que nous avons choisi de travailler sur la conception et la création d’une table interactive. Il s’agit d’une table dotée d’un écran tactile et qui peut être utilisée de différentes situations, comme lors de réunions ou simplement pour se divertir, dessiner ou jouer.
Nous tenons à remercier Messieurs Verrier et Bazeille, nos professeurs, qui nous ont encadré lors de ce projet et sans qui il n’aurait pas été possible.

1. Phase d’étude
1. Présentation du projet
Notre table tactile est basée sur une technologie nommée “FTIR” (Frustrated Internal Reflection). Pour mettre en place un tel écran, il faut d’abord une plaque translucide entourée de leds infrarouges. Cette plaque servira de support aux rayonnements infrarouges des leds qui se dispersent de manière uniforme dans ce support.
Lorsqu’un doigt est posé sur la surface, nous modifions le comportement de la lumière infrarouge dans la plaque. Une partie de cette lumière est alors déviée vers le sol et grâce à une caméra infrarouge, nous pouvons repérer cette modification sous la forme de “blobs”.
En traitant les images reçues de la caméra, nous pouvons déterminer à quel endroit simuler un clic de souris sur l’ordinateur.
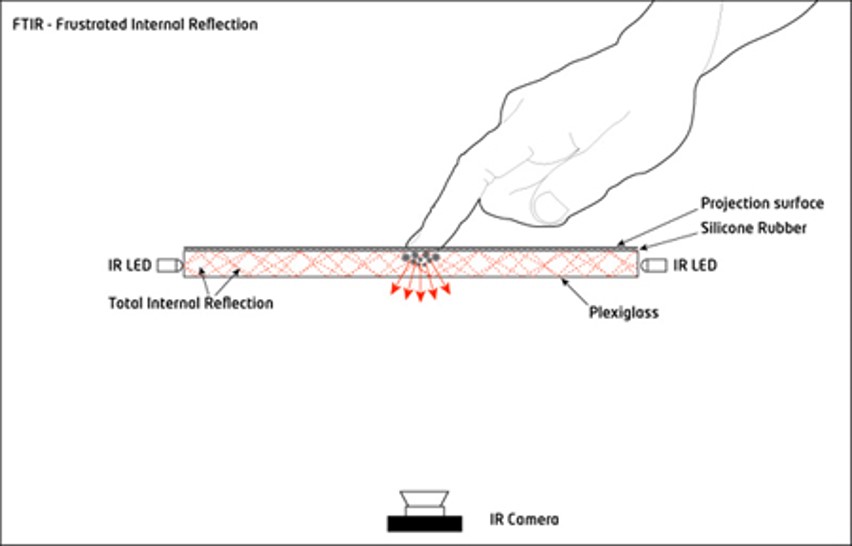
Le choix de cette méthode dite “FTIR” est intéressant car nous pouvons utiliser un vidéoprojecteur pour afficher l’écran de l’ordinateur. En effet le vidéoprojecteur émet de la lumière visible et ne perturbe donc pas notre système infrarouge.
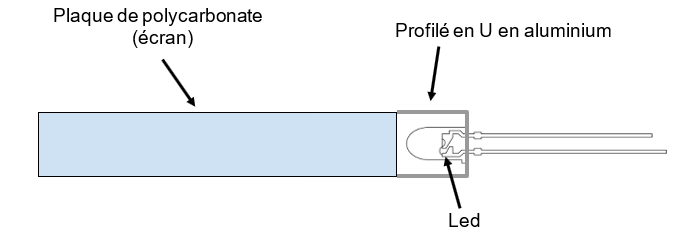
Cependant afin de pouvoir projeter sur l’écran (qui est entièrement transparent), il faut rajouter une surface de couplage légèrement opaque. Cette surface de projection, comme visible sur le schéma, permet aussi d’améliorer la réflection de la lumière infrarouge lorsque nous touchons l’écran.
2. Matériel en possession
Pour réaliser notre projet l’IUT nous a prêté un vidéo projecteur et un Raspberry Pi 3 pour réaliser le traitement d’image et la programmation de la détection de blob et le tracking.


3. Répartition des tâches
Nous nous sommes réparti les tâches afin que tout le monde puisse contribuer au projet. Nous avons tous réalisé de la surface de couplage. M. Merimeche a fait la conception et la réalisation de la table, il a fait la recherche des caméras que nous pouvons modifier afin de lui enlever son filtre infrarouge. M. Vessot s’est occupé de la recherche des composants pour l’écran, a réalisé le schéma électrique et le soudage des LED. M. Giudilli s’est occupé surtout de la programmation et du polissage du polycarbonate du prototype. M. Binder s’est occupé de l’organisation du projet et du polissage du polycarbonate de la table. Quand une personne avait fini sa tâche, il en aidait une autre afin d’aller plus vite.
4. Recherche de matériel
Il nous a fallu rechercher un écran transparent, nous pensions à une plaque de plastique. Après de nombreuses recherches, nous avons opté pour un écran en polycarbonate.
Nous avons dû ensuite chercher une webcam sur laquelle le filtre infrarouge est facile à enlever, nous avons retenu quelques modèles :
- Sony Playstation Eye Camera
- Philips SPC900NC
- Logitech QuickCam Express
- Microsoft LifeCam VX-1000
Nous avons finalement choisi la Sony Playstation Eye Camera car elle était plus facile à obtenir et dans un délai rapide. Cependant après certains tests, nous avons tout de même changer l’objectif de cette caméra pour mieux détecter les infrarouges et supprimer le visible.
5. Conception du prototype
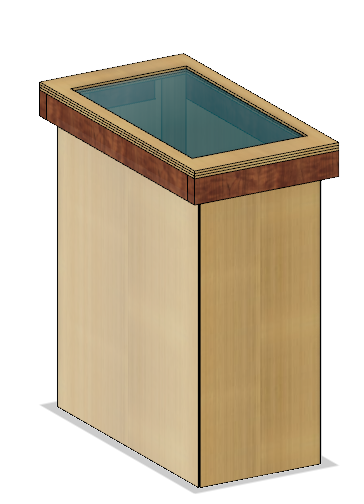
Il nous a fallu d’abord concevoir un prototype avant de commencer la table tactile. Ce prototype a d’abord été modélisé en 3D sur le logiciel Fusion 360. De dimension raisonnable (40*20*20 cm), il permettait d’être transporté facilement et de simuler correctement le comportement d’une table tactile grandeur nature.
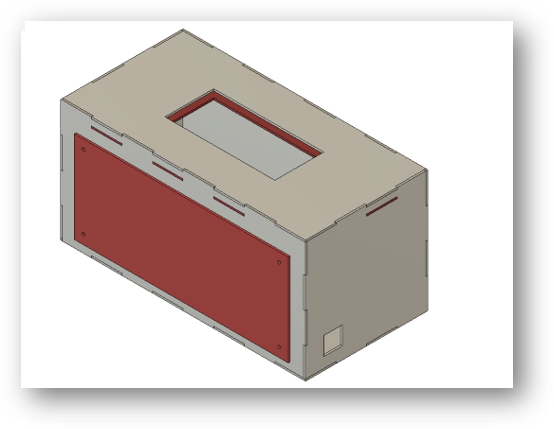
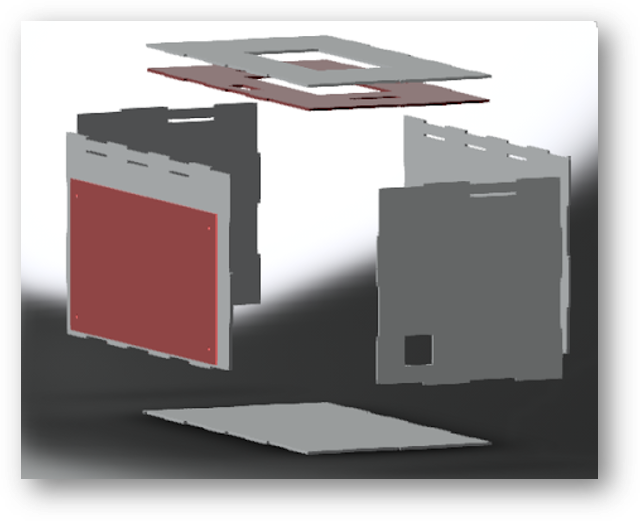
Le prototype modélisé sur Fusion360
La fente supérieure permet d’accueillir une plaque de polycarbonate de 10x20cm avec sa surface de couplage ainsi que les leds infrarouges qui l’entourent. Ce prototype intègre une partie amovible à l’avant (en rouge) pour faciliter l’installation de la caméra sous l’écran.
Nous avons choisi de maintenir les leds autours de l’écran en utilisant des profilés en aluminium
6. Conception de la table
Après des essais concluant sur le prototype, nous avons modélisé notre table tactile en 3D. Ce modèle nous a permis de quantifier le matériel nécessaire (bois et visserie). Nous nous sommes inspirés de différents modèles de tables et d’établis pour concevoir une table solide et non bancale.
2. Phase prototypage
1. Réalisation du prototype
Le prototype a été réalisé à la découpe laser selon le modèle vu précédemment. Voici son apparence une fois les différentes pièces montées.

2. Polissage du polycarbonate
La lumière ne passait pas bien dans la plaque de polycarbonate. De ce fait, nous avons dû la polir à l’aide du papier à poncer, du fil de fer et une dremel.
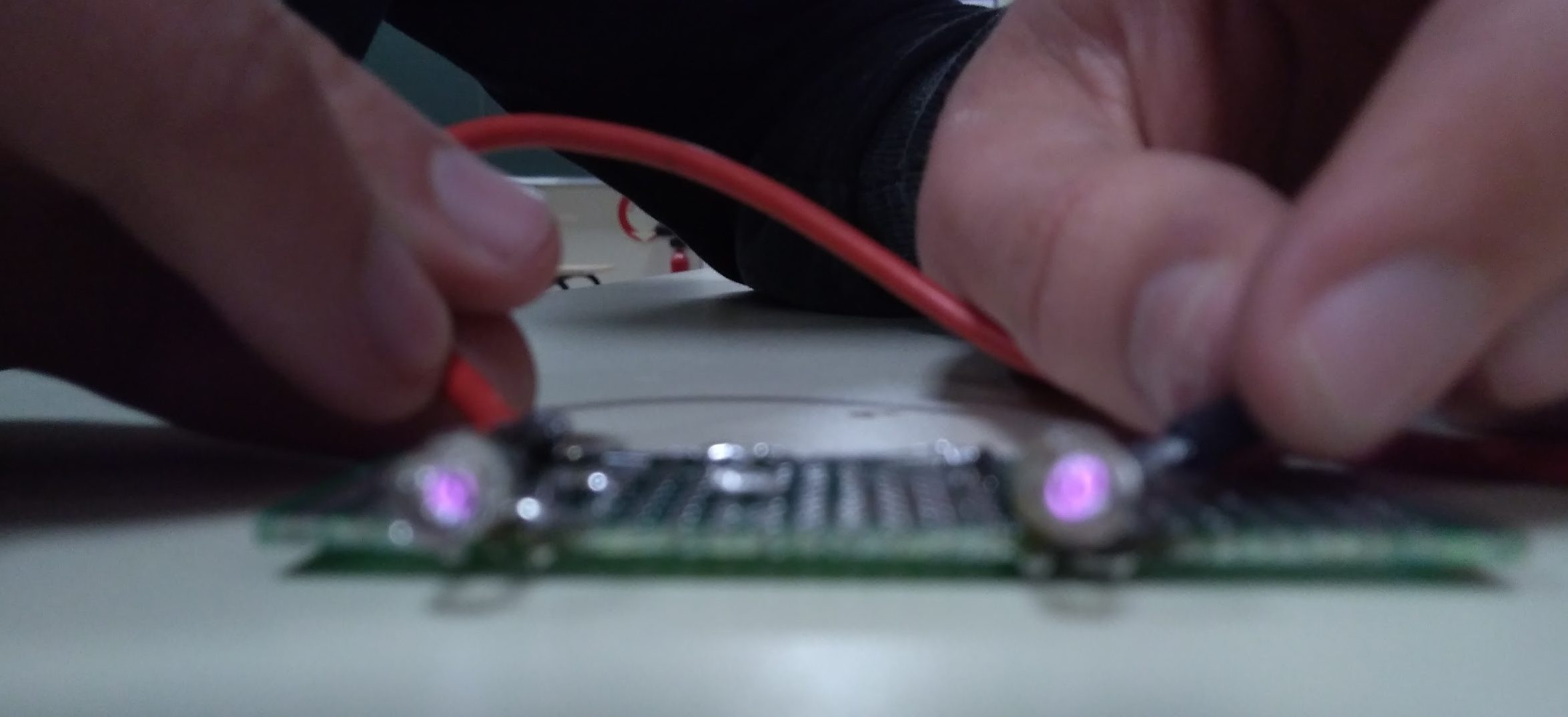
3. Connection des LEDs avec des fils
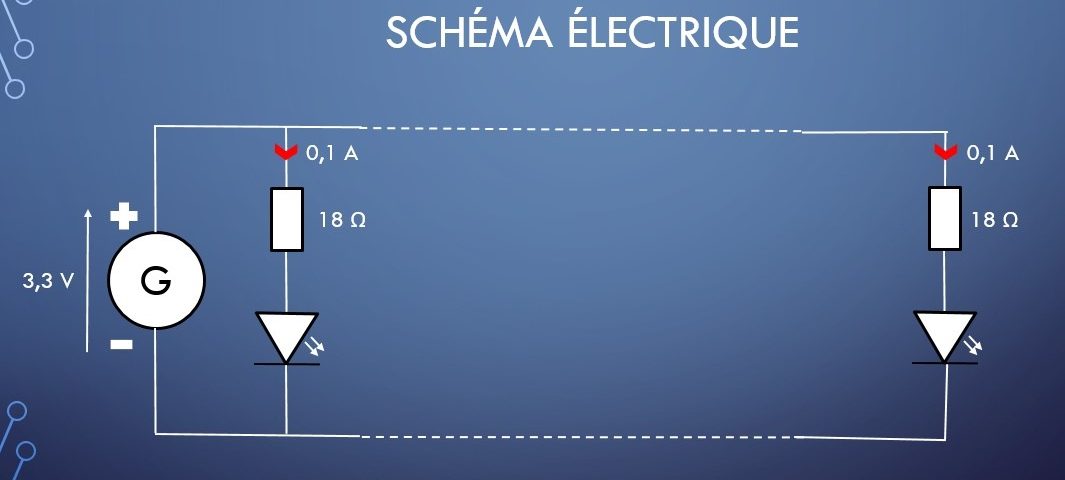
Nous avons choisi d’utiliser une alimentation d’ordinateur pour alimenter nos leds. Cette alimentation à une tension de 3.3 V à ses bornes et est capable de délivrer jusqu’à 33A. Ainsi, nous avons dimensionné nos résistances sur 18 Ω pour que nos leds puissent bénéficier d’un courant optimal. Toutes les leds étaient placées en parallèle.
Voici le schéma électrique :
Dans un premier temps, nous avons voulu connecter les LEDs avec des fils sur le prototype, cependant il s’est avéré que cette connection n’était pas adaptée pour ce prototype.
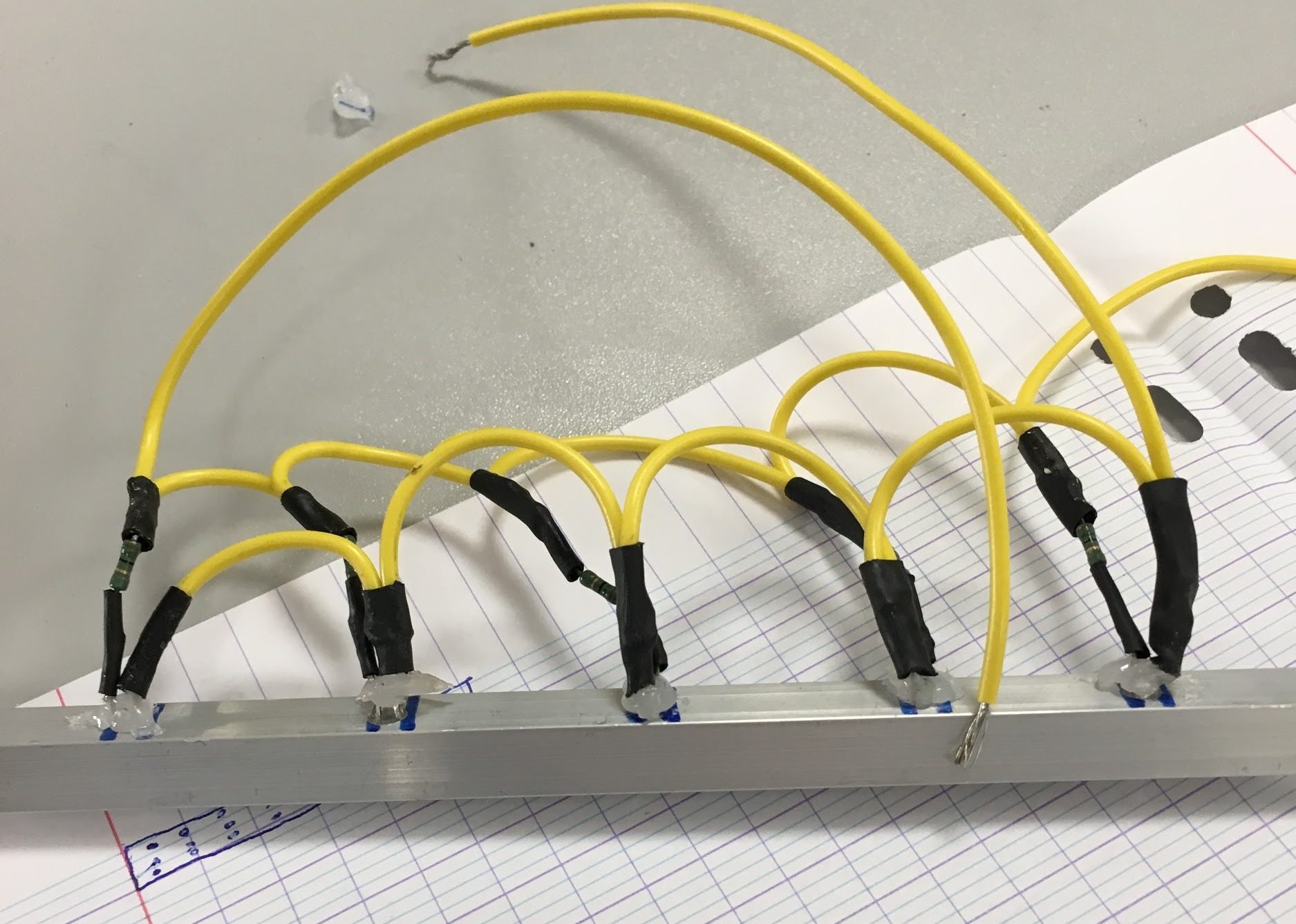
Ils y auraient eu trop de fils, l’isolation aurait été très compliqué à réaliser sur l’ensemble du prototype qui comportait déjà 15 LEDs. Nous avion donc un problème au niveau de l’espace que nous avions pour les fils et aussi de l’isolation du système. Nous avons donc cherché une autre méthode qui résolvait ces deux problèmes.
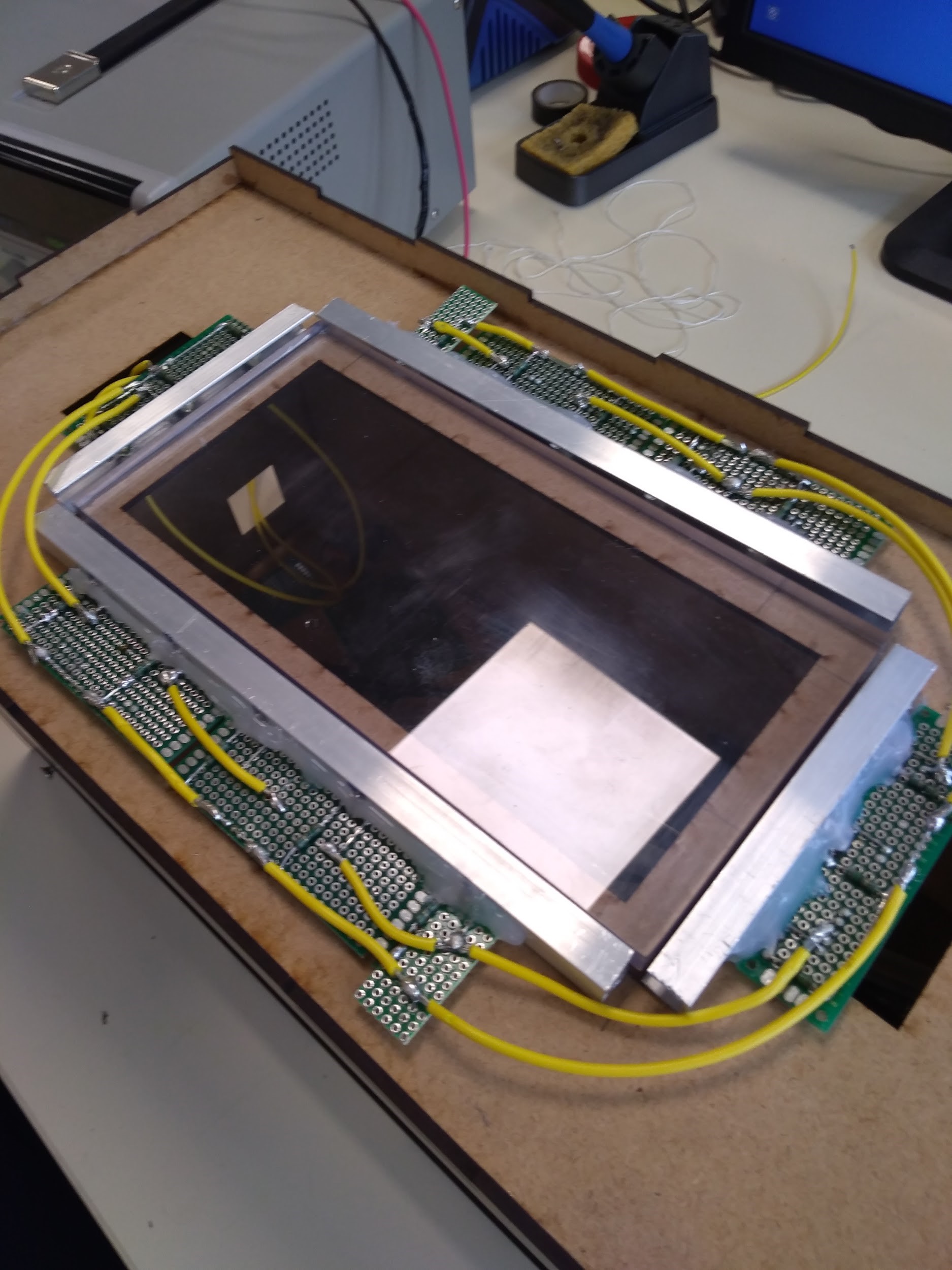
4. Connection des LEDs avec des PCB
Afin de pallier aux problèmes de dimension et d’isolation du schéma électronique, nous avons opté pour une méthode de connections avec PCB. Cette méthode nous permet en effet de gagner beaucoup de place dans le prototype car la soudure des LEDs est faite sur le PCB à des petits fils. Cela a donc permis un gain de place important, pour résoudre le problème de l’isolation, le PCB en lui-même était déjà bien adapté pour isoler le système électronique, mais nous avon rajouté par-dessus de la colle qui permettait d’isoler les parties un peu plus vulnérable que le PCB ne pouvait pas protéger.
Nous avons donc vu que ce système est très pratique pour un schéma électronique de petite taille et avec un courant peu élevé (jusqu’à 1,5A). Cependant pour un schéma électronique plus grand, le choix des PCB aurait été trop coûteux, nous avons donc dû chercher une autre méthode pour la table.
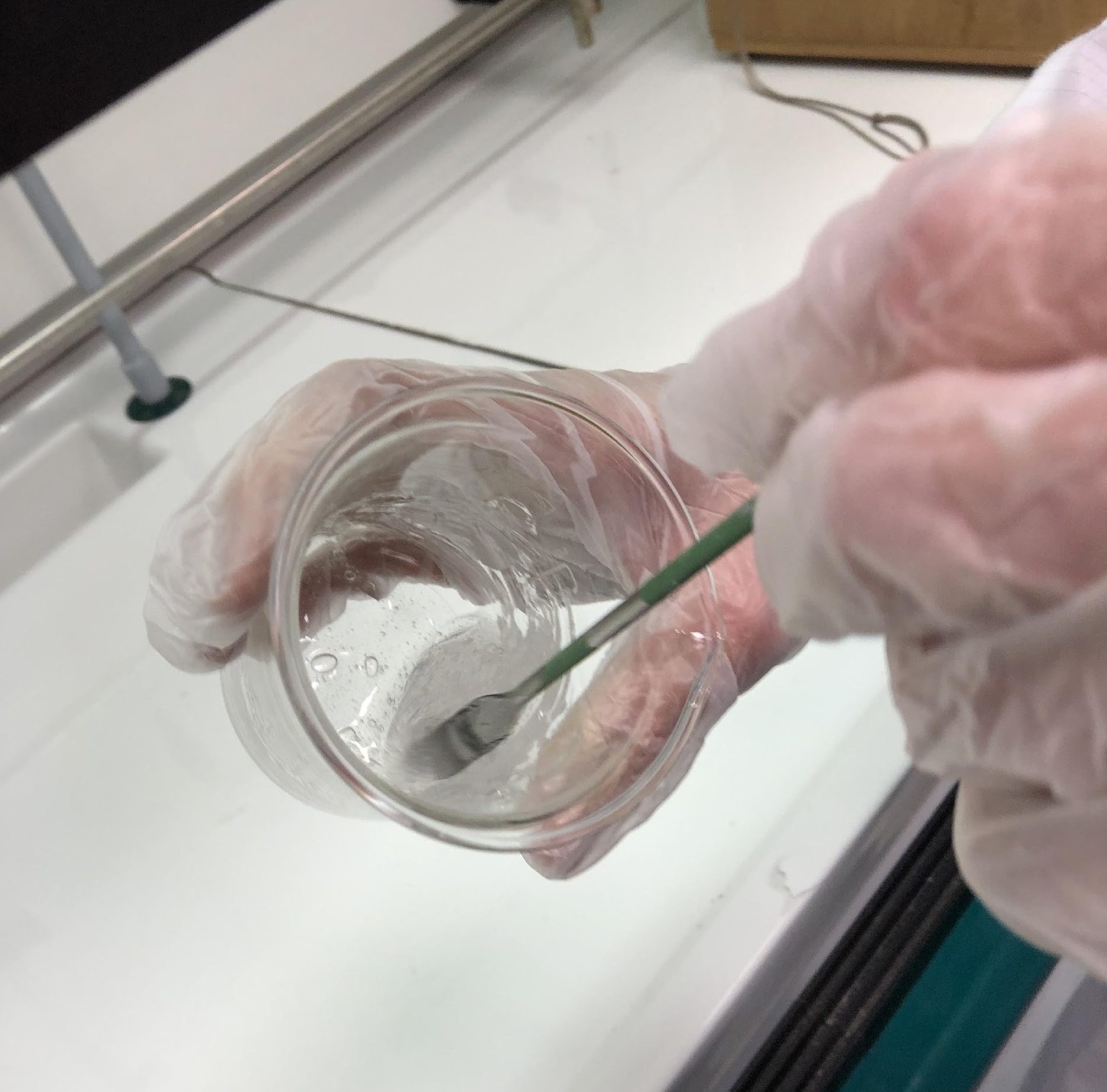
5. Fabrication de la surface de couplage
La surface de couplage à deux fonctions : elle sert à afficher l’écran via le vidéoprojecteur et à mieux détecter les doigts. Elle a été créée à partir d’une feuille de papier calque (ayant les mêmes dimensions que la plaque de polycarbonate) qui a été enduit d’un mélange de silicone et de diluant.
6. Assemblage
Nous avons installé les différentes composantes du prototype vues dans les parties précédentes sur la maquette.
3. Phase réalisation
1. Réalisation de la table
Une fois la commande de bois reçue, nous avons découpé les planches et les chevrons en se basant sur la modélisation 3D pour les dimensions. Nous les avons ensuite assemblés.

Une fois la table montée nous avons installé la plaque de polycarbonate par-dessus. Ensuite, nous avons rajouté autour de l’écran les profilés U avec les leds et la surface de couplage a été posée par-dessus.
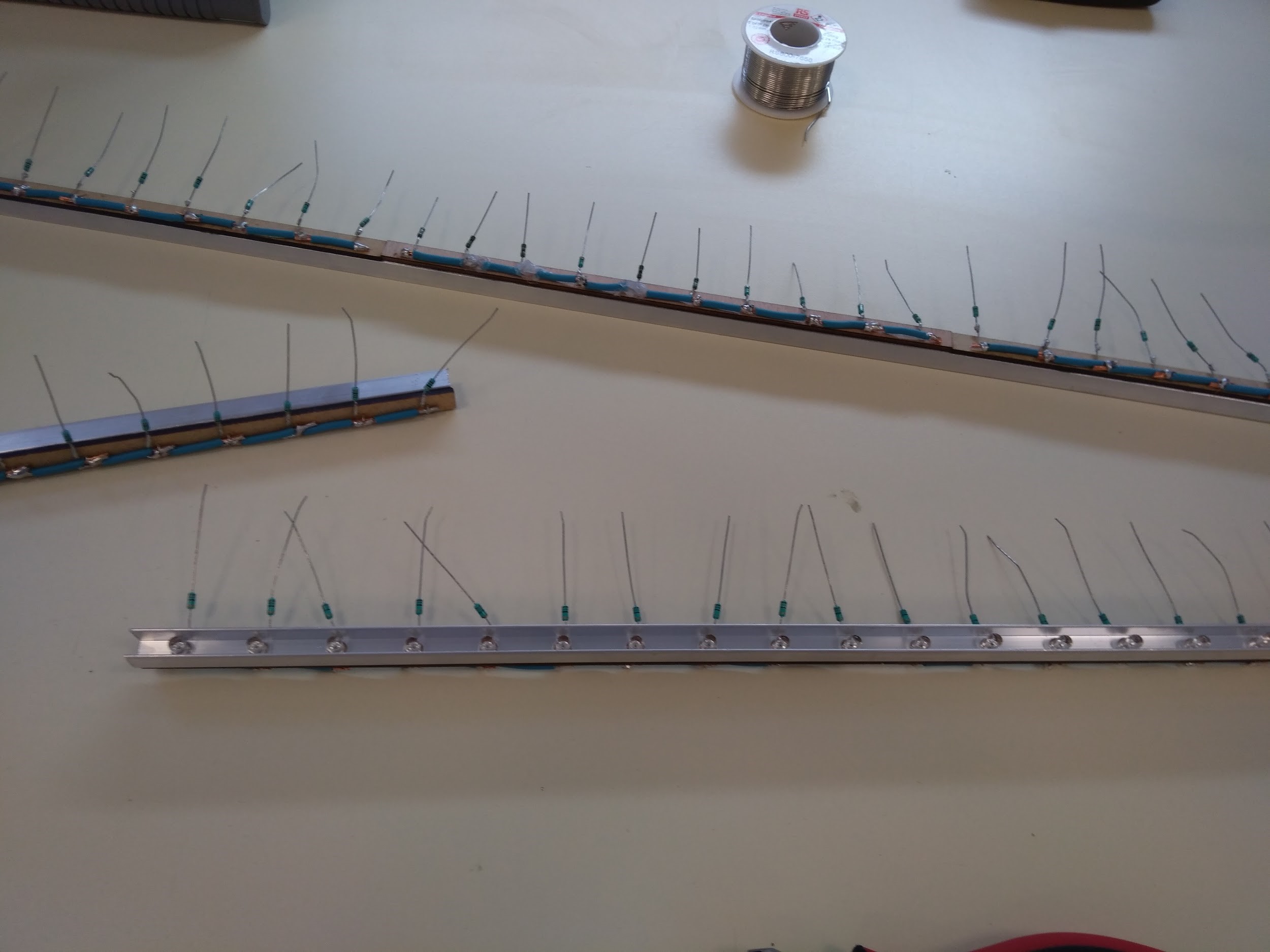
2. Soudure des LEDs
La solution que nous avons choisie pour connecter les leds entre elles sur la table est de modéliser nos propres PCB en bois et de les fabriquer avec la découpe laser.

PCB en bois modélisé en 3D
Soudure des leds
3. Programmation
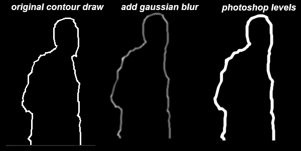
Traitement flux d’entrée : Pour repérer uniquement les changements effectué sur l’image d’entrée nous soustrayons l’image acquise par une première image prise lorsqu’il n’y a aucun doigt de posé. Ensuite nous appliquons différents filtres pour supprimer le bruit de fond dû à la caméra.
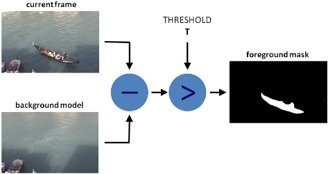
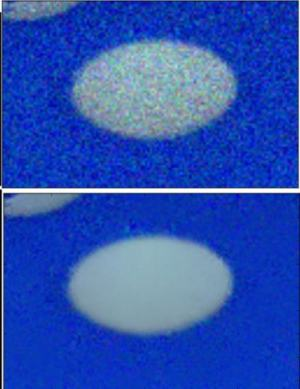
Détection des blobs : Comme nous l’avons vu précédemment, notre système infrarouge permet de repérer les doigts posés sur l’écran sous la forme de “blobs”.
Tracking : La détection de blob nous permet d’avoir un tableau de coordonnées représentant les différentes positions de chaque blob. Pour identifier ces derniers et les différencier un algorithme de proche en proche programmé par nos soins est utilisé ainsi chaque blob se voit donner un ID unique nous permettant de le différencier.
Calibrage : La webcam étant en train de filmer avec un grand angle, il fallait donc lui donner à travers le programme les dimensions de l’écran. Aussi, cette caméra n’étant pas totalement droite par rapport à l’écran, l’image reçue n’était pas 100% rectangulaire. Pour cela notre programme intègre une partie de calibrage. Il faut lui donner 4 positions sous la forme de blobs (en posant nos doigts) aux 4 coins de l’écran. Ainsi le programme en traitant ces données récupère les dimensions de l’écran et est capable de le redresser sous la forme d’un rectangle.
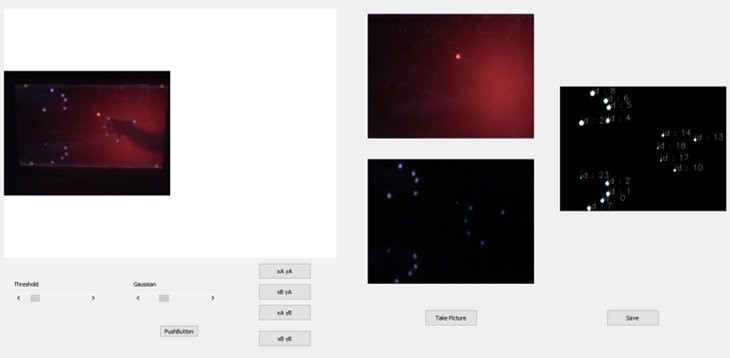
Interface et application : Les différentes parties du programme ont été regroupées sous une même interface.
4. Jeux
Nous avons aussi programmé quelques applications qui ont été optimisées pour la table. Elles ont été programmées en C++ et à l’aide de la librairie SFML.
“Paint” : Notre Paint reprend les bases du Paint sur ordinateur et on peut être plusieurs à l’utiliser en même temps.

“Hanoï” : Notre jeu des tours de Hanoï reprend les règles classiques du jeu pour 3 disques, il faudra donc utiliser le tactile afin de les déplacer.

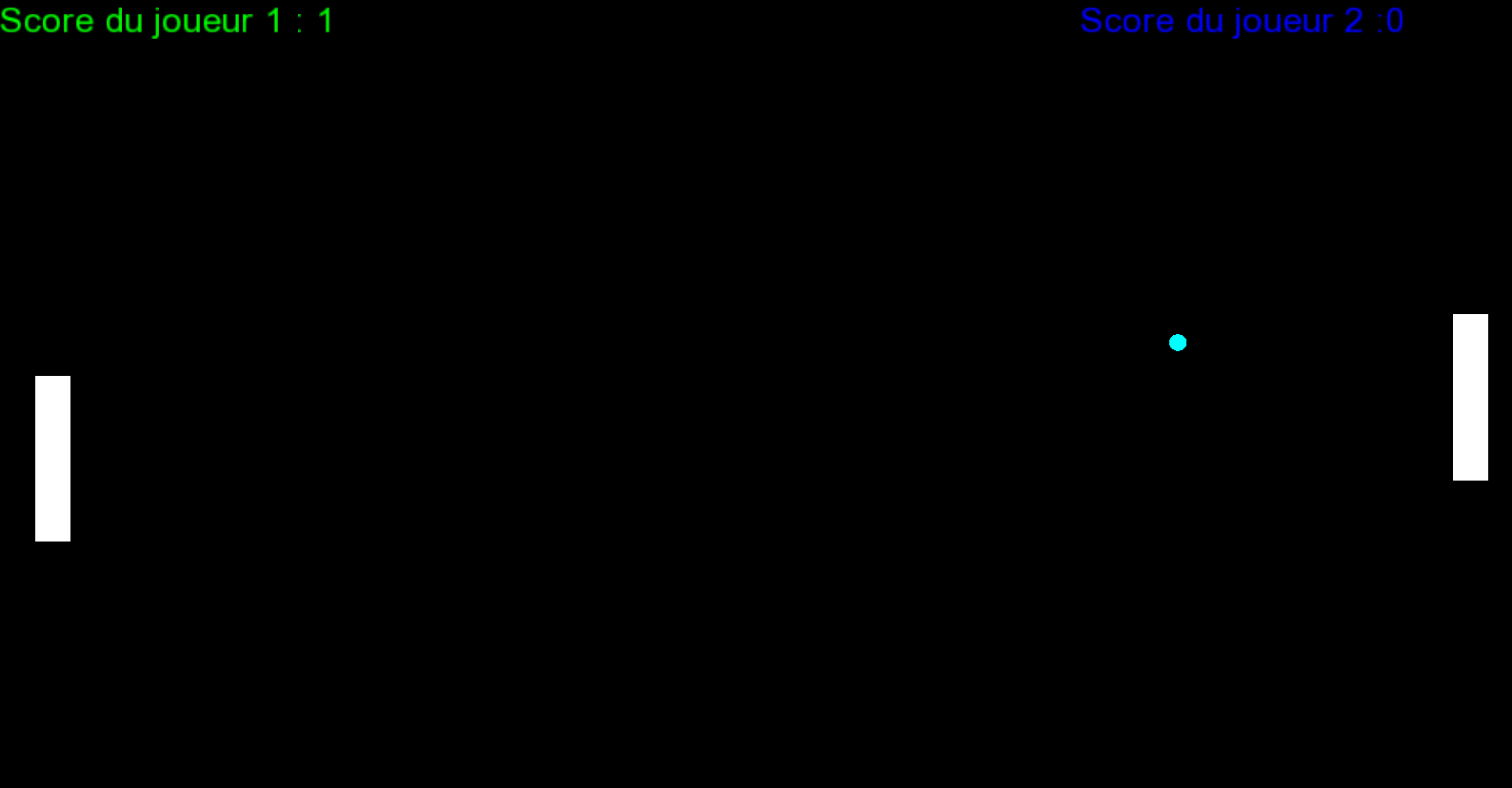
“Pong” : Ce jeu n’a pas encore été implémenté sur la table et nécessite 2 joueurs. Son amélioration et installation pourrait faire l’objet d’un projet futur.
5. Démonstration

6.Améliorations possibles
Des améliorations peuvent encore être réalisées sur notre table tactile. En voici certaines :
- Adapter les jeux Hanoï et Pong sur la table
- Soigner son esthétique (ponçage, peinture ..)
- Investir dans une caméra de meilleure qualité (avec un plus grand nombre d’image par seconde notamment)
- Porter les programmes sur un ordinateur plus puissant et l’intégrer dans la table
- Réaliser l’alimentation des leds