


Introduction
Etudiants de GEII première année, nous sommes arrivées a une période de l’année( mois de mars) que le département au projet d’étude et de réalisation de 1 ére année. C’est dans ce cadre là que plusieurs sujet de projets nous sont proposé. Libre aux étudiants de choisir sur quel projet ils vont se consacrer sur une période de 70 heures reparti en 4 semaines.
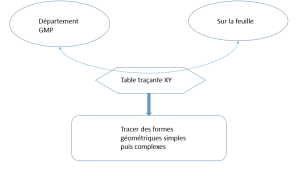
Dans notre cas, il s’agit du projet de la table traçante XY.
Présentation du sujet
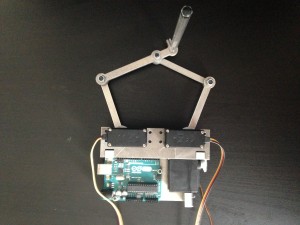
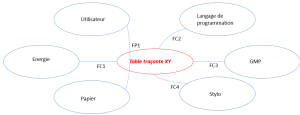
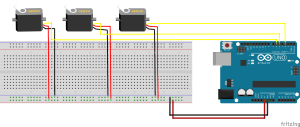
Un professeur du département Génie Mécanique et Productique (GMP) nous demande de lui programmer et d’interfacer une table traçante où la mécanique est déjà faite. La table traçante est piloté par 3 servomoteurs dont un qui permet de lever/abaisser le stylo. Ces 3 servomoteurs sont pilotés par l’intermédiaire d’une carte Arduino UNO. Le système doit être capable de tracer quelques formes géométriques simples (carré,triangle,cercle…) puis des formes plus complexes(sinus, fleur…).

Composition de la table
- Une carte Arduino Uno
- 3 servo moteurs (mouvement des 2 bras + position du stylo)

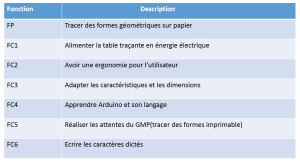
Cahier des charges:
Bête à corne :
Contraintes techniques :
Développement
Les différentes étapes du projet sont les suivantes :
-Connecter la carte Arduino aux servomoteurs selon leurs propres caractéristique techniques.
-Établir une interface en fonction des formes déjà programmé
Gestion de Projet
La réalisation de ce projet se découpe en quatre grandes parties :
- Établir la connectique entre la carte arduino et les 3 servomoteurs.
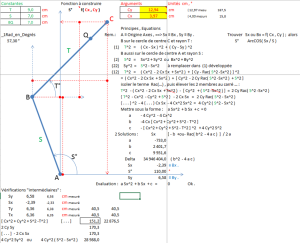
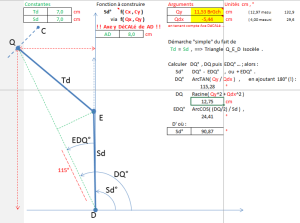
- Faire la décomposition mathématique du système
- Réaliser un programme qui fasse quelques formes géométrique
1-carré :
2-une ellipse :
3-un cercle
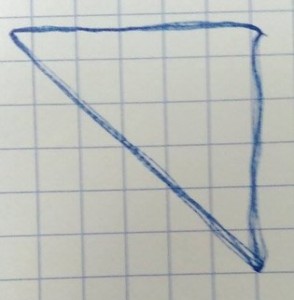
4-Un triangle
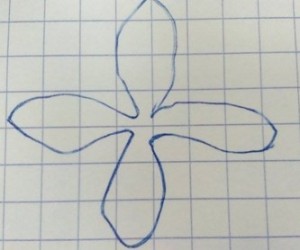
5-Une fleur
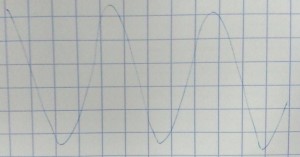
6-Un signal sinusoïdale
- Créer une interface qui permette de choisir la forme que l’on veut tracer
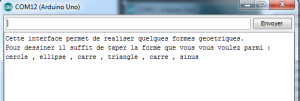
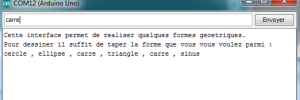
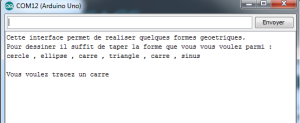
Tableau de bord
Mardi 02/02/2016
Première séance de projet
Découverte du projet et la compréhension de ses objectifs
Tracer le plan d’action et déterminer nos propres objectifs
Mardi 1/03/2016
Faire fonctionner les servomoteurs
Réalisation du branchement de ces moteurs avec la carte Arduino Uno
Mercredi 2/03/2016
Découverte du langage Arduino
Comprendre ses bases
Vendredi 4/03/2016
On a commencé à dessiner des traits droit mais le résultat n’était pas bon car on n’avait pas des données, il y’avait un manque de précision. On a décidé alors de faire une décomposition mathématique pour un avoir un résultat parfait en fonction des coordonnées des vis écrous présents dans le mécanisme et leurs angles
Mardi 8/03/2016
Décomposition mathématique du la table.
Réalisation d’un schéma 3D qui représente le mécanisme.
Mercredi 9/03/2016
La décomposition n’était pas si simple que ça, on a eu de grandes difficultés car les équations étaient très complexes, même avec l’aide des professeurs on n’y arrivait pas.
Vendredi 11/03/2016
On a donc décidé d’abandonner la décomposition mathématique à la main, et passer à l’Excel.
On a réussi à avoir les coordonnées en fonction des angles mais ce n’était pas le but.
Mardi 15/03/2016
A l’aide d’Excel on a réussi à exprimer les angles en fonction des coordonnées
Mercredi 16/03/2016
Finaliser les résultats Excel.
On a commencé à programmer les résultats quand on réussit à avoir avec Excel avec du langage c sur codeBlocks.
Jeudi 17/03/2016
Programmation C des coordonnées en fonction des angles
Etude financière
-
Pour la réalisation de notre projet, nous avions un budget de 200€ maximum.
-
Ce projet ne nécessite aucuns achats importants. Toutes les pièces nécessaires sont disponibles à l’IUT.
Conclusion
-
On a découvert un nouveau domaine qui est la mécatronique
-
La mécatronique est la combinaison synergique et systémique de la mécanique, de l‘électronique, de l’automatisme et de l‘informatique en temps réel.
Bibliographie
openclassrooms.com : Apprentissage ARDUINO
www.arduino.cc (Forum) : Recherche de solutions pour nos problèmes techniques
(Fonctionnement servomoteurs)