

SOMMAIRE
I. INTRODUCTION
II. CAHIER DES CHARGES
III. REPARTITIONS DES TÂCHES
IV. DIAGRAMME DE GANTT
V. PRESENTATION DES ELEMENTS
VI. REALISATIONS
VII. CONCLUSION
I. INTRODUCTION
Dans le cadre de nos études en Génie Électrique et Informatique Industrielle (GEII), nous sommes amenés cette année à travailler sur un projet en collaboration avec le département Génie Mécanique et Productique (GMP).
Le projet que nous avons choisi consistera à différencier des pièces de formes différentes à l’aide d’une caméra se situant d’un côté du robot et de les amener de l’autre côté de celui-ci tout en les triant. Ceci sera réalisé à l’aide du robot TP80 de Stäubli que l’on va présenter par la suite.
II. CAHIER DES CHARGES
1. Présentation du robot :
Le robot dont nous disposons pour réaliser notre projet est le TP80 de Stäubli, il a été conçu en février 2012, pèse 71kg, il a la capacité de réaliser 200 déplacements par minutes et de ce fait a une charge nominale plutôt faible de 500g. Ce robot est très adapté aux applications de packaging dans l’agroalimentaire ou le secteur pharmaceutique par exemple.
2. Critères de fonctionnement :
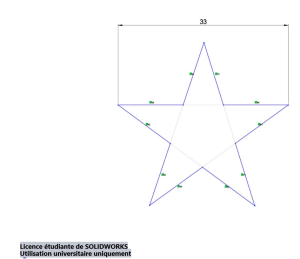
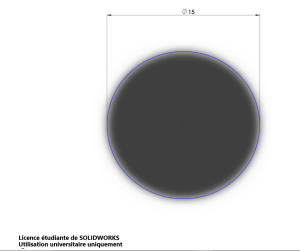
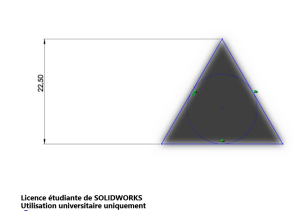
Le robot doit être capable de différencier 4 types de pièces de formes différentes : rondes, carrées, triangles et étoile. Il devra les déplacer dans un ordre précis qui correspond à la demande de l’utilisateur.
3. Critères techniques :
- Choix du préhenseur : il doit être adapté aux pièces que l’on va déplacer.
- Prise en main du logiciel de programmation Stäubli.
- Prise en main du logiciel de programmation du système de vision.
- Mise en place d’un système de communication.
- Fabrication des pièces.
4. Contraintes du projet
Date limite : 01 Juin 2017
Budget : 200€
III. REPARTITIONS DES TACHES
Chargé de la Vision SENE Jean-Michel
Programmation Robotique LEMBLE Pierre
Partie Mécanique LEMBLE et SENE
Partie Communication SENE et LEMBLE
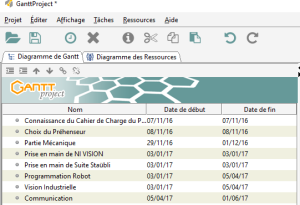
IV. DIAGRAMME DE GANTT

V. PRESENTATION DES ELEMENTS
1. Robot Fast Picker TP80
Le robot FAST picker TP80 est un robot extrêmement rapide conçu pour des opérations de manutention de pièces petites et légères (moins d’1 kg). Le robot FAST picker TP80 est particulièrement adapté aux applications de packaging dans divers secteurs comme l’agro-alimentaire, le médical, le photovoltaïque ou la cosmétique.

Vitesses élevées
Ce robot extrêmement rapide est en mesure de soutenir des cadences allant jusqu’à 200 coups/minute en fonctionnement continu.
Fixation simple
Le robot FAST picker TP80 peut être monté sur une structure bien plus légère que les robots à structure parallèle, apportant une réduction substantielle des coûts et une simplification de l’intégration du robot.
Précision et rigidité élevées
La conception et la construction très rigide du robot lui permet une grande répétabilité sur toute son enveloppe de travail.
Grande enveloppe de travail
Son rayon d’action de 800 mm et sa course de 100 mm (200 mm*) donnent au robot FAST picker TP80 une grande enveloppe de travail tout en maintenant des cadences très élevées.
Tous les câbles utilisateurs passent dans le bras
Les connexions électriques, pneumatiques et les entrées/sorties sont disponibles sur la bride outil avec l’ensemble des câbles logés et protégés à l’intérieur du bras.
2. Caméra National Instrument
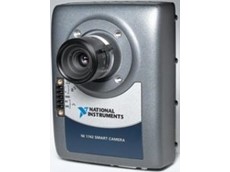
Résolution : 640×480 pixels
Vitesse max d’acquisition : 60 images/s
Type de couleurs : monochrome
Processeur : 400MHz
Mémoire système : 128 Mo
Entrées isolées : 2
Sorties isolées : 2
Ports Ethernet : 2
Longueur : 8,58cm
Hauteur : 11.77cm
VI. RÉALISATIONS
1. Partie mécanique :
Préhension
Nous avons choisi pour la préhension d’utiliser un système venturi.
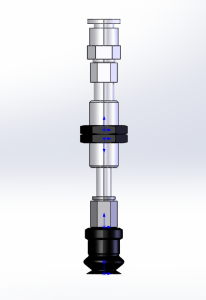
Nous ne possédons pas encore cette ventouse ainsi que le système venturi mais ce sera sur ce modèle que l’on travaillera. Nous avons donc réalisé par la suite une pièce permettant d’adapter ce système de préhension à la bride outil. Étant donné que nous n’avons pas d’étudiant GMP qui travaille avec nous, pour réaliser cette pièce nous nous sommes tournés vers M. CHASSIGNET qui nous a donc aidé pour la réalisation de cette pièce d’adaptation. Cette pièce a été découpée à l’atelier GMP au jet d’eau.
Usinage de la pièce
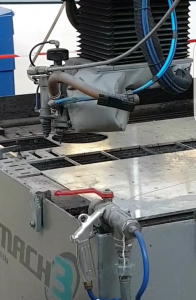

Pièce Finale

Celle-ci nous permettra d’être parfaitement centrés par rapport à la bride outil mais aussi d’empêcher tout mouvement de translation ainsi que de rotation.
Usinage de la pièce
Les pièces ont été dessinées à l’aide du logiciel Solidworks pour que par la suite nous puissions les faire découper par laser à l’IUT Lab.


2. Partie Programmation
La vision : NI VISION BUILDER
La programmation de la caméra se fait avec le Logiciel NI Vision Builder : C’est un logiciel qui donne la possibilité de configurer, définir des valeurs de référence et déployer aisément un système qui répond aux attentes des applications de vision industrielle. Depuis le filtrage par motif et la détection de présence jusqu’à l’alignement de précision et la classification. Un environnement de développement offrant un menu interactif remplace la complexité de la programmation en simplifiant le développement et la maintenance, sans sacrifier les performances et la gamme des fonctionnalités.
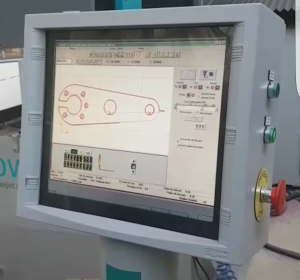
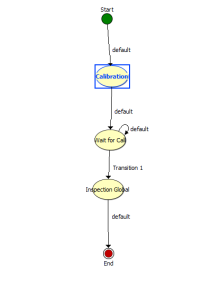 Voici un aperçu global du programme réalisé par la caméra. On commence par faire une calibration de la caméra pour déterminer quelle est la longueur, en millimètres, d’un pixel. Par la suite, la caméra va attendre que le robot lui envoie une demande d’acquisition afin d’envoyer au robot les coordonnées des pièces. La caméra réalisera donc une inspection afin de déterminer les coordonnées des pièces afin de les envoyer au robot.
Voici un aperçu global du programme réalisé par la caméra. On commence par faire une calibration de la caméra pour déterminer quelle est la longueur, en millimètres, d’un pixel. Par la suite, la caméra va attendre que le robot lui envoie une demande d’acquisition afin d’envoyer au robot les coordonnées des pièces. La caméra réalisera donc une inspection afin de déterminer les coordonnées des pièces afin de les envoyer au robot.
- La calibration :
Pour faire la calibration de la caméra, on va demander à la caméra de détecter les deux objets qui se situent à gauche afin de déterminer la longueur, en pixels, qui séparent ces deux éléments.
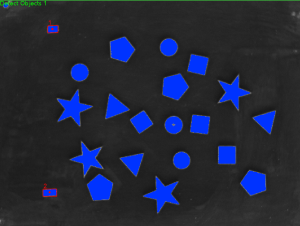
Afin de déterminer cette distance et la convertir en millimètres, nous avons utilisé un bloc « calculator » qui n’est rien d’autre qu’un programme LabView. Dans ce programme on récupère donc les positions en Y de chacun des objets afin de les soustraire pour obtenir la distance qui les sépare selon l’axe Y. Sachant que cette distance est égale à 140mm il suffit de faire un produit en croix pour obtenir la longueur en millimètre d’un pixel.

Grâce à cela, il nous suffira de multiplier cette valeur par les coordonnées en pixels de chaque objet pour obtenir leur coordonnées en mm.
Une fois la calibration finie et que le robot a demandé à la caméra de lui envoyer les coordonnées des pièces, la caméra va réaliser plusieurs étapes afin de différencier les différentes pièces. Afin de déterminer si la pièce est carrée, ronde ou triangle il a fallu faire une détection d’objet et y rajouter des filtres afin d’être capable de ne détecter uniquement les objets de chaque famille.
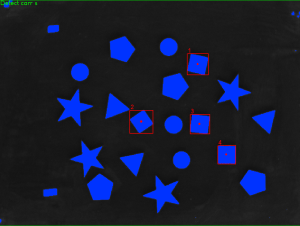
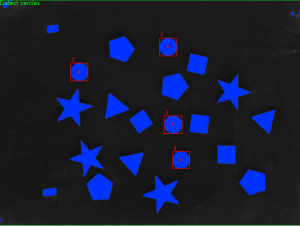
Une fois que cela est fait on peut envoyer ces coordonnées au robot.
La Programmation du Robot : Suite Stäubli Robotics
Nous utilisons le logiciel Stäubli pour la programmation du robot c’est un logiciel de développement, de simulation, de maintenance, et de suivi d’applications robotisées. Stäubli Robotics Suite intègre des outils permettant la réalisation de simulation 3D (importation de modèles CAO, modélisation 3D, détection de collision, analyse d’accessibilité, mesure réaliste de temps de cycle), de programmation et débogage par le biais d’un éditeur de programme, de maintenance, et de suivi de la cellule robotisée avec des outils d’accès à distance.

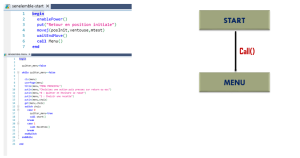
Le programme que nous avons développé avec le robot est fait comme suit.
On commence tout d’abord par mettre le Robot sous tension puis on fait appel au Menu.
Une fois dans le Menu, on peut aller dans le sous Programme Recette :
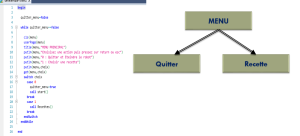
Au sein du menu Recette on a la possibilité de saisir le nombre de pièces que nous souhaitons déplacer.
On saisit le nombre de pièces triangulaires, le nombre de pièces rectangulaires, le nombre de pièces pentagonales et le nombre de pièces étoilées.
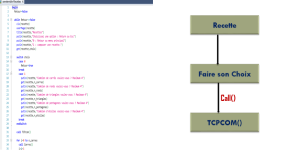
Après la saisie des nombres de pièces on envoie une demande d’acquisition à la caméra. Cette dernière nous envoie les coordonnées des pièces sous forme de tableau.
C’est à partir de ce moment que s’exécute le programme déplacement des pièces en fonction de leur forme.
3. Partie Communication
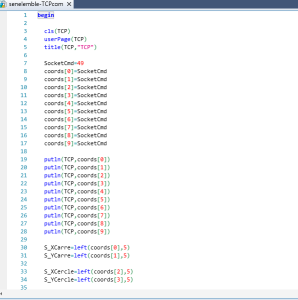
 La communication se fait donc comme suit : Le constituant le Client envoie une demande d’acquisition à la Caméra le serveur. La Caméra effectue l’acquisition et envoie les coordonnées au robot sous forme de tableau.
La communication se fait donc comme suit : Le constituant le Client envoie une demande d’acquisition à la Caméra le serveur. La Caméra effectue l’acquisition et envoie les coordonnées au robot sous forme de tableau.
On a de ce fait les coords[0] et coords[1] qui constituent respectivement les coordonnées x et y des carrés ainsi de suite.
VII. CONCLUSION
Ce projet nous a permis d’améliorer nos connaissances en programme robotique et vision industrielle. La programmation du robot ainsi que celle de la caméra n’était pas très compliqué. Ce qui nous a causé problème tout au long du projet c’est la communication entre la caméra et le robot.
Le robot ne comprenait pas le type de données que lui envoyait la caméra.
Toutefois, le projet reste très intéressant.