Sommaire
I – Présentation du projet
1 – Projet
2 – Membres
II – Analyse fonctionnelle
1 – Bête à cornes
2 – Diagramme pieuvre
3 – Mindmap
4 – Diagramme de GANTT prévisionnel/réel
III – Etude
1 – Principes de fonctionnement
2 – Design de la maquette
3 – Sécurité
4 – Budget
IV – Réalisation
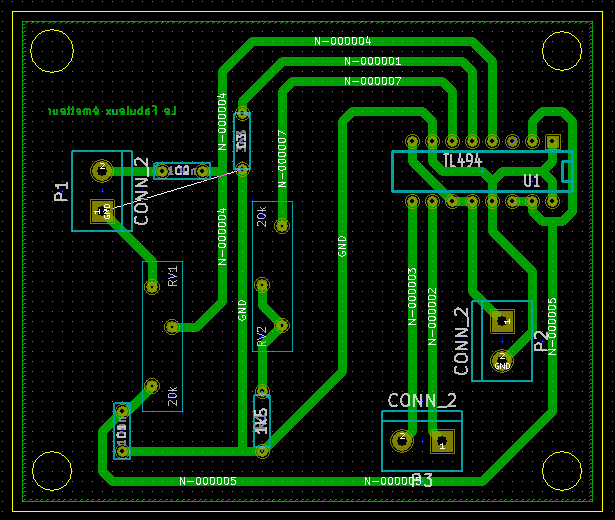
1 – Circuit imprimé PWM
3 – Circuit imprimé émetteur
4 – Arduino
5 – CAO
6 – Tests
V – Conclusion
1 – Difficultés rencontrées
2 – Bilan du projet
3 – Remerciements
I – Présentation du projet
1 – Projet
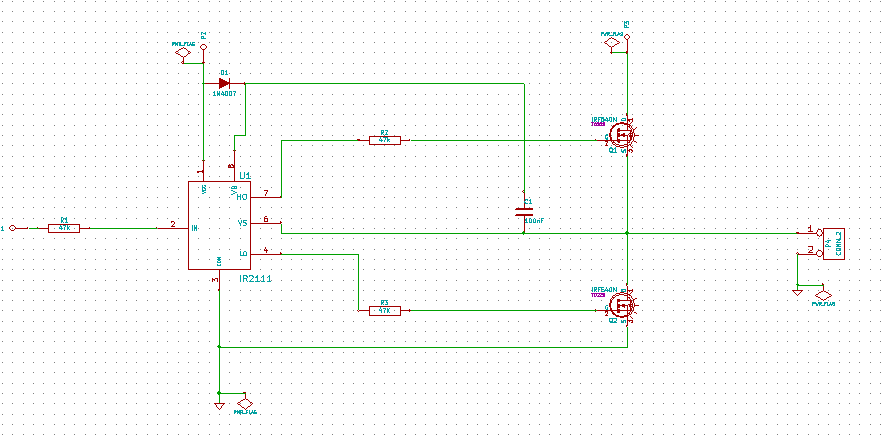
Pour ce projet, nous avons repris le travail réalisé par le japonnais Kazunori Miura rédigé dans l’article « Ultrasonic Directive Speaker » datant de mars 2011. C’est grâce au schéma électrique de son enceinte ultradirectionnel que nous avons su quels composants étaient nécessaire, comment les relier entre eux et comment cela fonctionne.
Cette enceinte atypique ne diffuse pas le son dans toute les directions comme un haut-parleur classique, mais dans un direction précise. En effet, lorsque l’auditeur se trouve en face de l’enceinte il entendra le son émit, en dehors il ne percevra rien.
2 – Membres
Initialement nous sommes 3 équipes de projet distincts, mais ces 3 équipes ont été affectés au même projet suite à un quiproquo administratif, en voici la liste :
Equipe 1 |
Equipe 2 |
Equipe 3 |
|
AMIAR Yassine KHALFALLAH Farès |
BERTRAND Clovis JEZIORNY Thomas |
CAUVEZ Thibaut RIETVELD Ruben SAFRI Ashraf |
Malgré que nous étions nombreux, chacun d’entre nous a pu « apporté sa pierre à l’édifice ». Et force est de constater que le fait que nous étions nombreux, a été bénéfique car cela a permis d’alléger la charge de travail de chacun d’entre-nous.
II – Analyse fonctionnelle
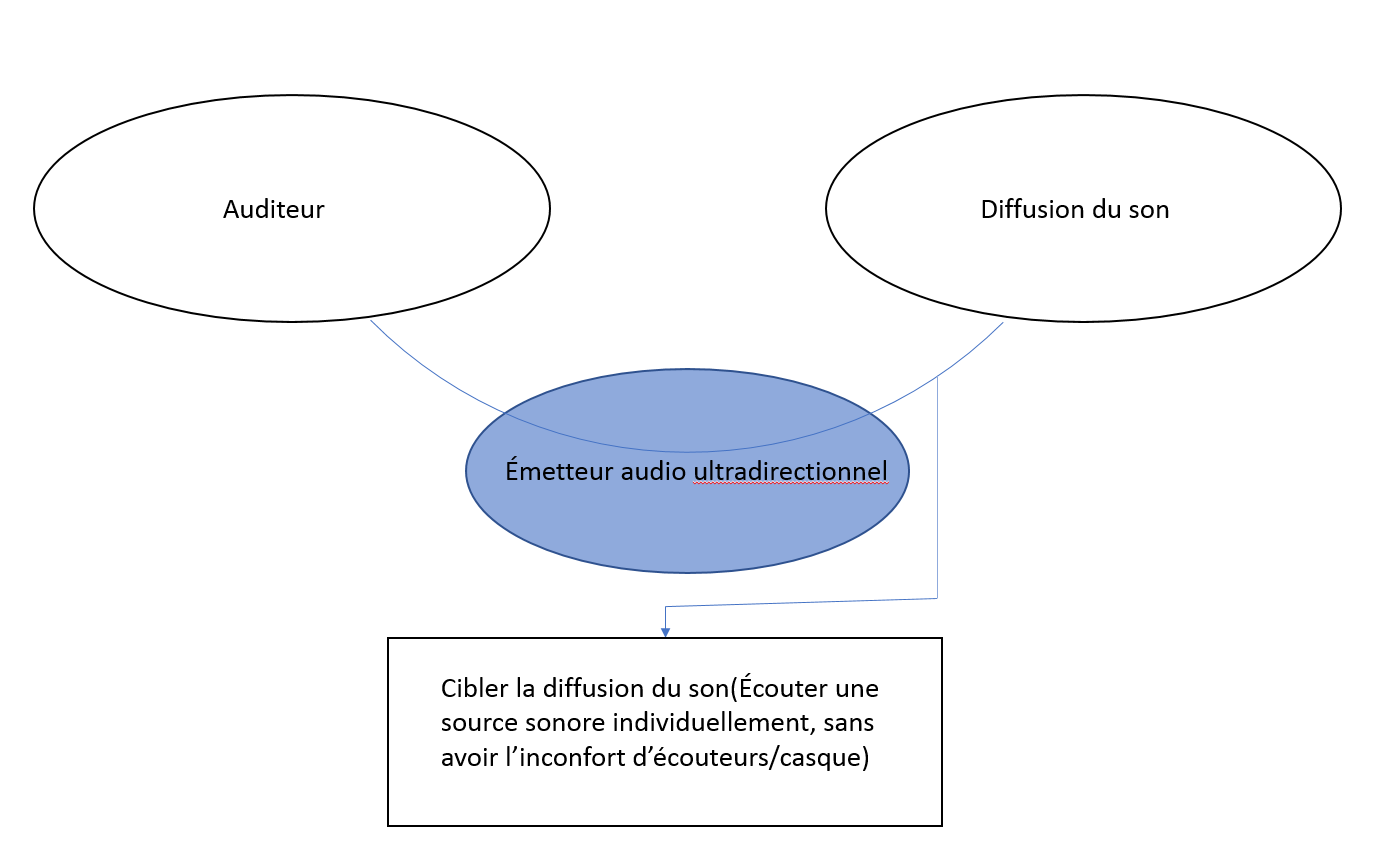
1 – Bête à cornes
L’émetteur audio ultradirectionnel rend service à l’auditeur en agissant sur la diffusion du son dans le but de cibler la diffusion du son.
2 – Diagramme pieuvre
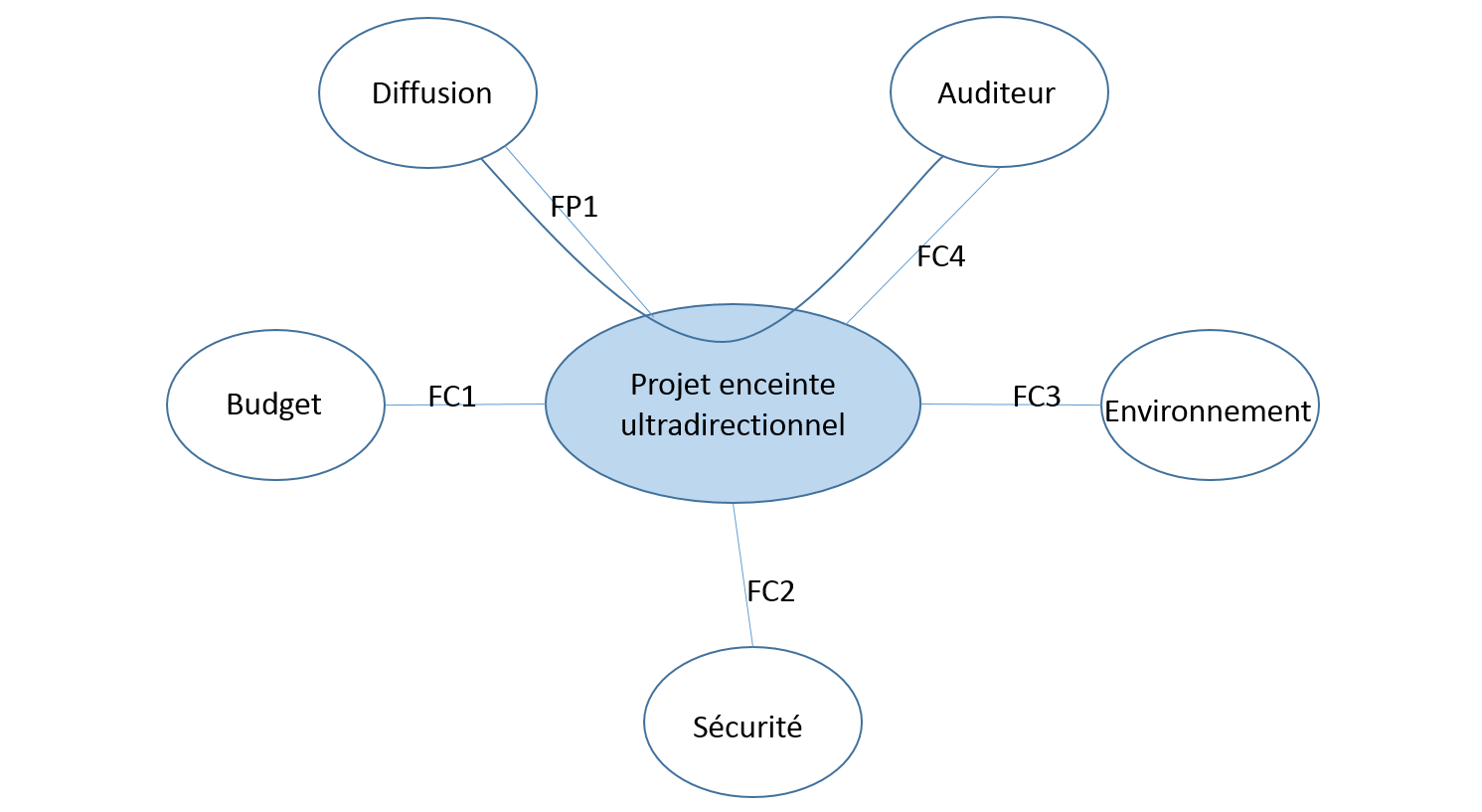
La fonction principale de l’enceinte est de diffuser une onde sonore, cependant notre projet comporte aussi des contraintes: notamment budgétaire car il ne faut pas que le coût dépasse 350 euros; de sécurité car il ne faut pas blesser l’auditeur; environnementale car le produit doit pouvoir fonctionner dans un milieu sec, chaud,froid et humide; et enfin il faut que l’onde sonore soit audible par l’auditeur, la plus clair possible et agréable a l’écoute.
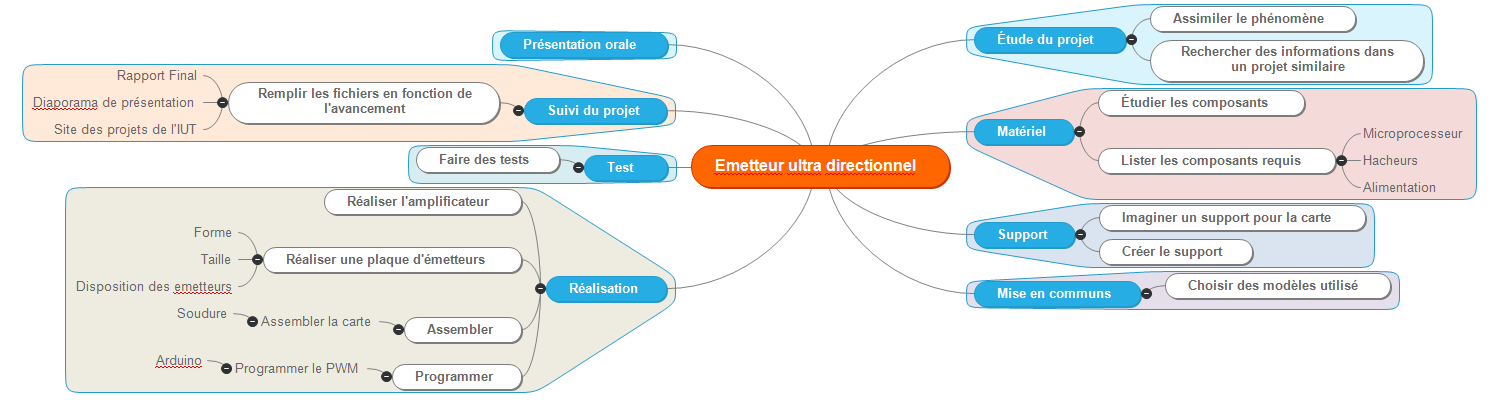
3 – Mindmap
4 – Diagramme de GANTT prévisionnel/réel
Planning prévisionnel:

Planning réel:

III – Etude
1 – Principes de fonctionnement
L’enceinte est composé de piézos électrique, qui de par leurs vibrations émettent des ultrasons (très directionnels). Mais les ultrasons ne sont pas audible par l’homme car leurs fréquences est supérieur au domaine audible qui va de 20Hz a 20kHz pour l’homme. Pour que ces ultrasons deviennent audible, ce qui est tout de même nécessaire pour un haut-parleur, on effectue une modulation d’amplitude avec un PWM (Pulse Width Modulation).
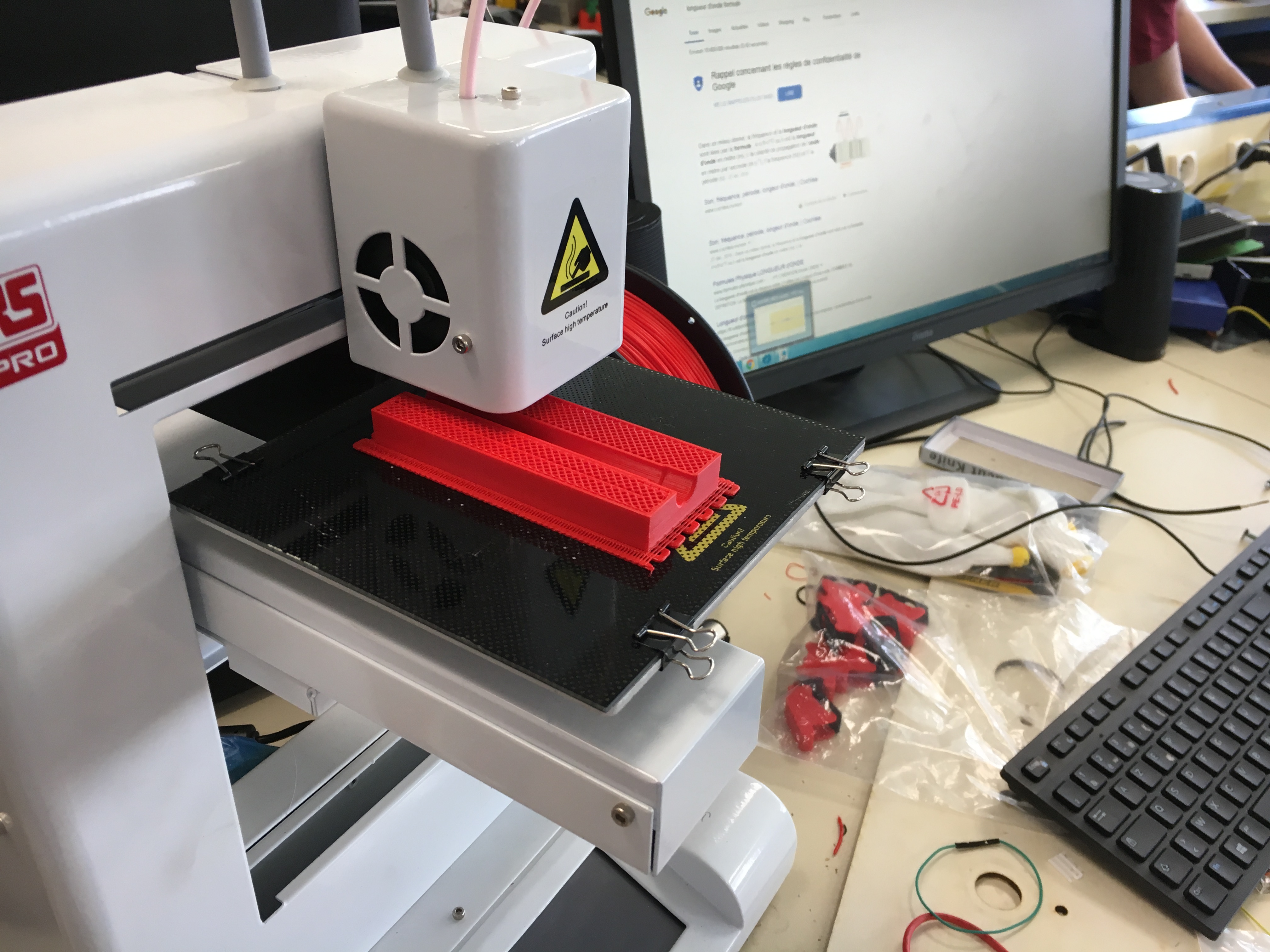
2 – Design de la maquette
Nous nous étions concertés pour se mettre d’accord sur la disposition des piézo-electriques
3 – Sécurité
4 – Budget
| Composants | Quantitée | Prix unitaire (en euros) | Prix total (en euros) | |
| IRF 540 | 6 | 0.70€ | 4.20€ | |
| IR2111 | 4 | 2.31€ | 9.24€ | |
| TL494 | 1 | 0.74€ | 0.74€ | |
| Résistance potentiométrique | 2 | 0.76€ | 1.52€ | |
| Alimentation 12V | 2 | 18.00€ | 36.00€ | |
| Adaptateur jack | 2 | 3.75€ | 7.50€ | |
| Arduino UNO | 1 | 3.00€ | 3.00€ | |
| Piézoelectrique | 110 | 2.00€ | 220.00€ | |
| Total | 282.20€ |
IV – Réalisation
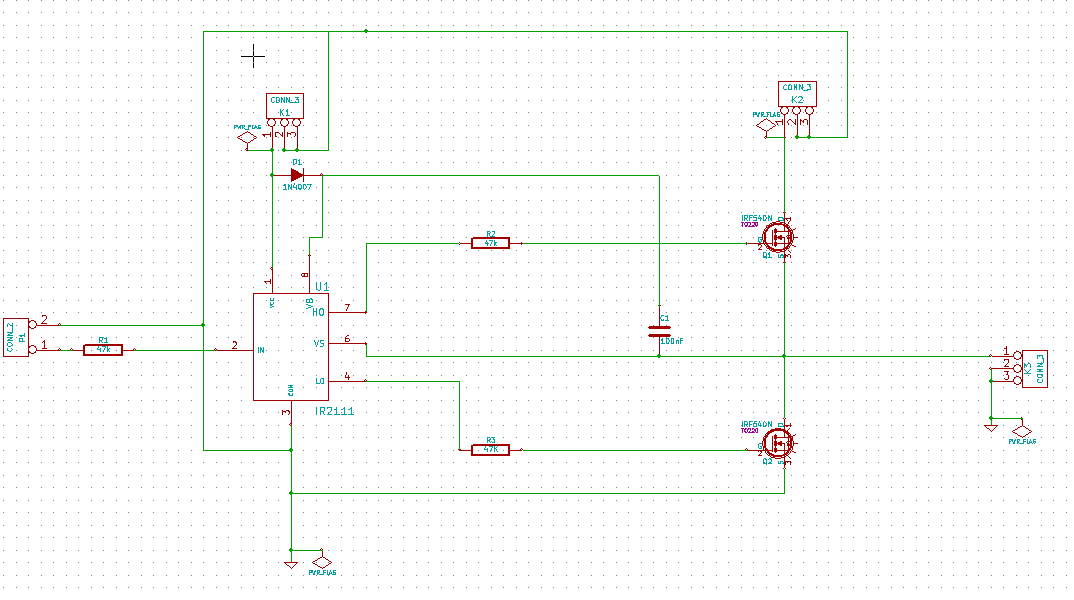
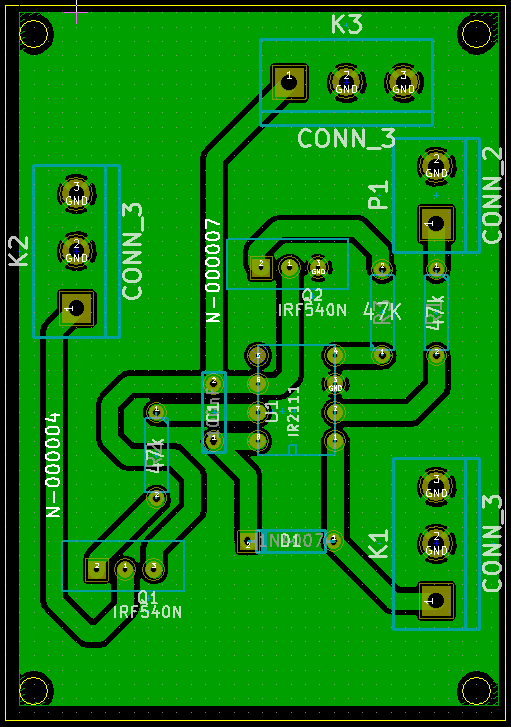
1 – Circuit imprimé PWM
3 – Circuit imprimé émetteur
4 – Arduino
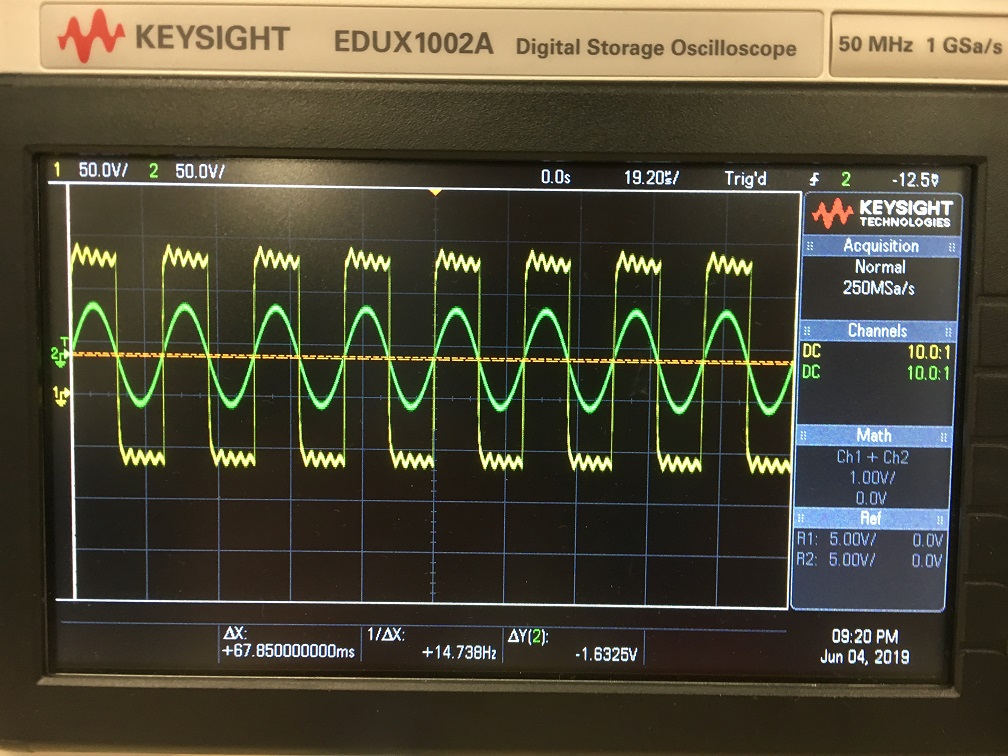
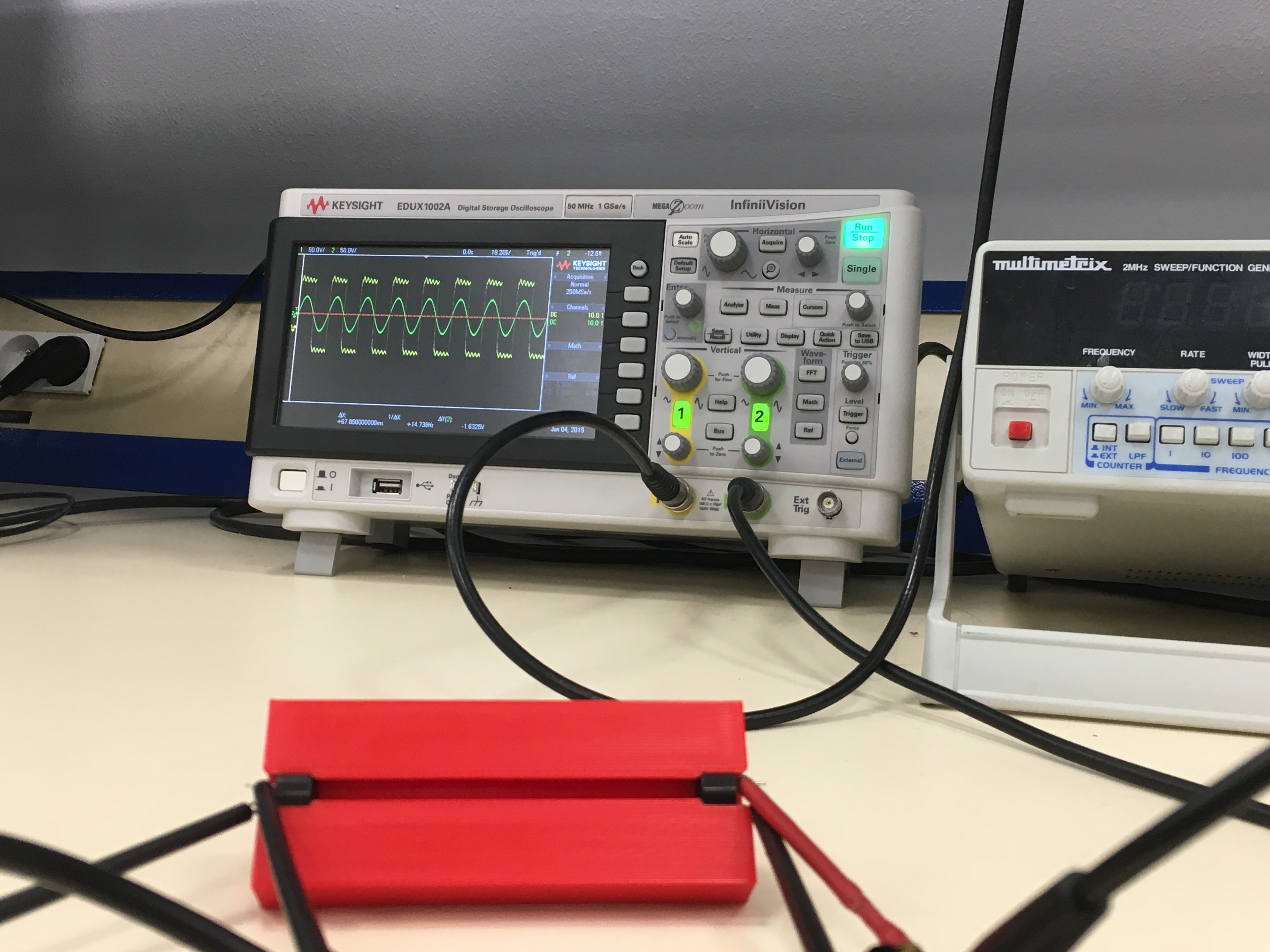
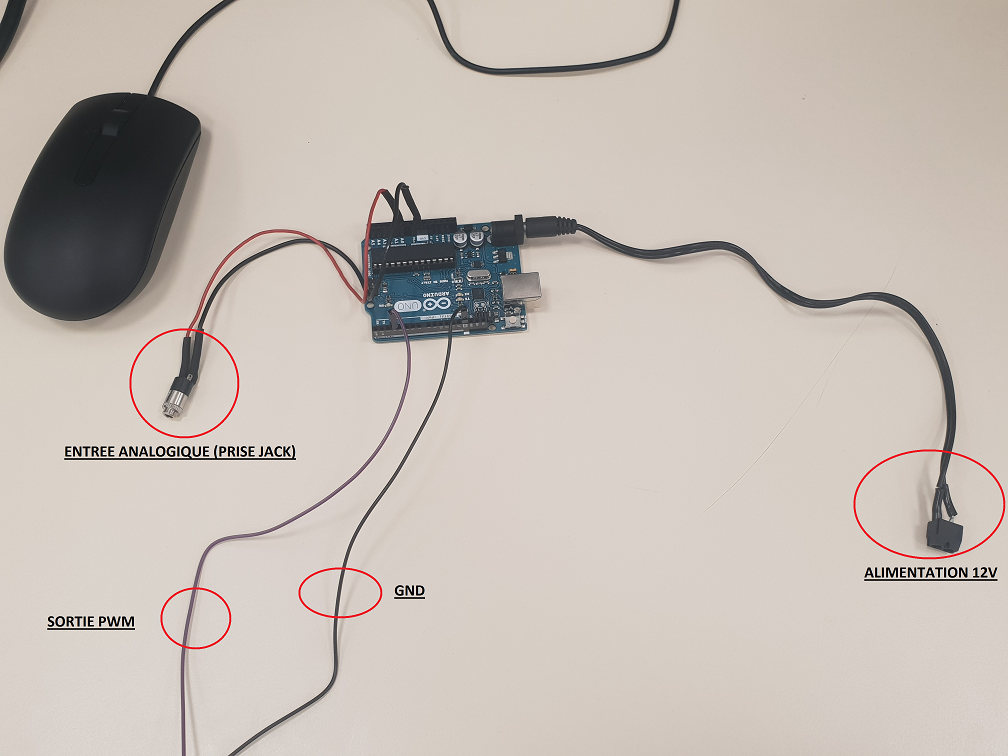
Arduino est une carte électronique qui comporte un microcontrôleur programmable. Dans notre cas, nous l’utilisons d’une part pour implémenter la fonctionnalité du module PWM, et d’autre part, pour envoyer le signal aux émetteurs .La programmation de la carte Arduino est l’une des étapes les plus importantes de notre projet. La difficulté aura été de trouver, d’adapter et comprendre les bouts de code que l’on a pu trouver sur internet en rapport avec notre projet. De plus, il était difficile de comprendre comment gérer les timers du microcontrôleur Arduino. L’image ci-dessous montre a quoi cette carte ressemble. Nous voyons le câble noir d’alimentation de la carte a droite,a gauche on a l’entrée analogique(ce qui permet de moduler le signale),en bas on a un câble GND et un sortie PWM sur le pin 3(ce qui permet de débiter les 40kHz) .
Ce programme permet d’envoyer grâce a l’entrée analogique ( A0 sur la carte Arduino) un signal carré de 40kHz sur la sortie PWM (pin 3 sur la carte Arduino). Ce signal est modulable grâce a la sortie PWM (PulseWidth Modulation).
6 – CAO
7 – Tests