
Projet Robot Suiveur
Sommaire
I] Introduction
Présentation
Diagramme Bête à cornes
Diagramme Pieuvre
II] Répartition des tâches
Valentin et Redwan : Partie Informatique
Bastien et Kyllian : Partie Mécanique
III] Tâches accomplies
Partie Informatique :
Logiciels utilisés
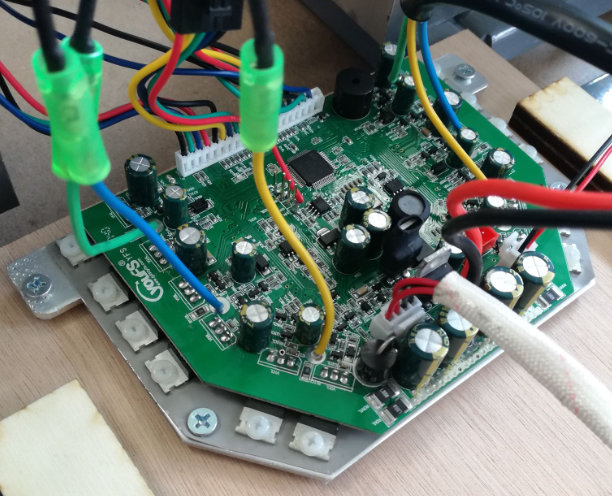
Photo de la carte
Partie Mécanique :
Support de la carte et des roues
Tableau de bord
Câblage circuit de puissance
IV] Conclusion
Avis sur le Projet
I] Introduction :
Ce projet consiste à suivre un guide réalisé par Niklas Fauth sur le site Github. Celui-ci peut être retrouvé à cette adresse : https://github.com/NiklasFauth/hoverboard-firmware-hack/wiki/Build-Instruction:-TranspOtter
Le but principal de ce projet est d’améliorer un chariot afin que celui-ci puisse être télécommandé localement grâce à un joystick, ainsi qu’à distance avec une manette. Ce chariot sera doté des options suivantes :
- Système de navigation local et à distance
- Système d’éclairage et de clignotants
- Avertisseur sonore
- Capteurs à ultrasons afin d’éviter les collisions
- Arrêt d’urgence
 Tableau de Bord (Arrêt d’Urgence, bouton marche/arrêt, éclairage ON/OFF, Mode de marche, Klaxon)
Tableau de Bord (Arrêt d’Urgence, bouton marche/arrêt, éclairage ON/OFF, Mode de marche, Klaxon)
 Manette FlySky FSI6
Manette FlySky FSI6
Le chariot amélioré sera principalement utilisé afin de faciliter la conduite de celui-ci. L’utilisateur pourra l’utiliser pour transporter tout type de marchandises avec un effort moindre.
Diagramme Bête à Corne
Diagramme Pieuvre
II] Répartition des tâches :
Partie Informatique
Ubuntu est une machine virtuelle permettant de simuler l’OS Linux. Nous avons utilisé ce logiciel afin de compiler le programme C.
Le logiciel ARDUINO a été utilisé pour programmer les différentes fonctions que l’on voulait ajouter au Chariot, comme le Klaxon, l’éclairage ou encore le capteur à Ultrasons.
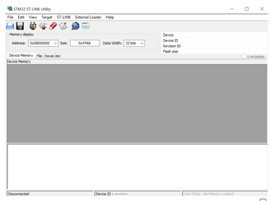
Afin d’implémenter le programme dans notre carte, nous avons utilisé le logiciel STLINK.
Partie Mécanique
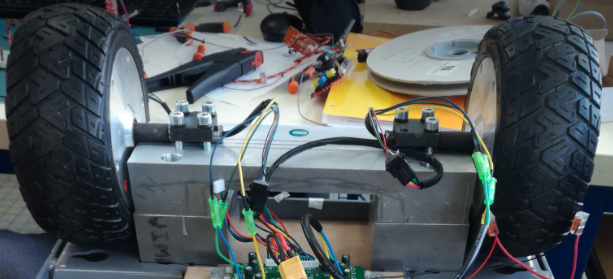
Sur les photos ci-dessus, nous pouvons observer une vue d’ensemble de la partie Mécanique. Le support des roues a pu être réalisé grâce a une machine permettant d’usiner le support.
Le support de la carte a été réalisé grâce au logiciel CorelDraw.
III] Tâches accomplies
PARTIE MECANIQUE
Support Roues :
Support Carte :

Eclairage:
 Phares Arrière
Phares Arrière
 Phares Avant
Phares Avant
Tableau de bord :

PARTIE INFORMATIQUE
Flash Carte :
Carte :
IV] Conclusion :
Etudiants ayant participé à ce Projet :
 HUSSER Valentin
HUSSER Valentin
 PACOURET Kyllian
PACOURET Kyllian
 DARRAZ Redwan
DARRAZ Redwan
 JANEL Bastien
JANEL Bastien
Avis sur le Projet
En conclusion, Ce projet nous a apporté énormément aussi bien sur plan social (travail en groupe) que technique.