

Sommaire
– Présentation projet
– Cahier des charges (Bête à corne / Diagramme Pieuvre)
– Diagramme FAST
– Achats et appareils utilisés
– Partie programmation
– Arduino
– Staublie / Cognex
– Partie test
– Conclusion
Partie Intégration d’un capteur de détection pièce
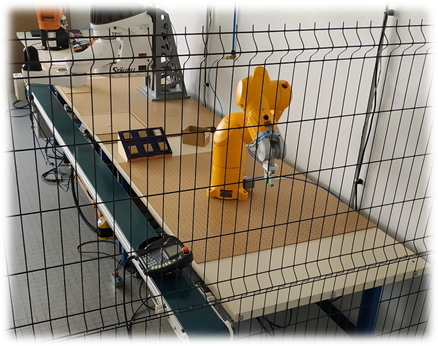
1) Présentation du projet
2) Cahier des charges
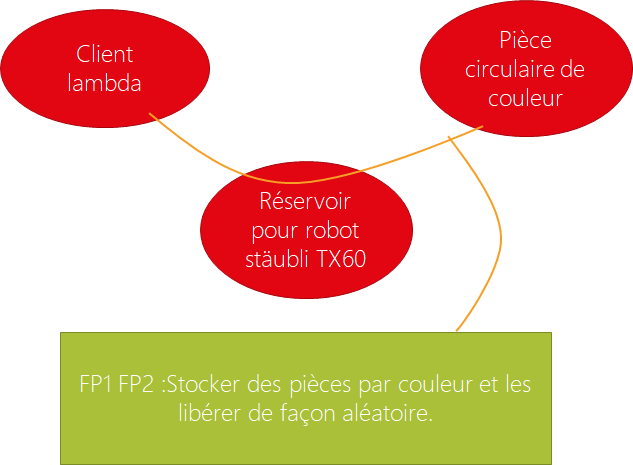
Diagramme pieuvre
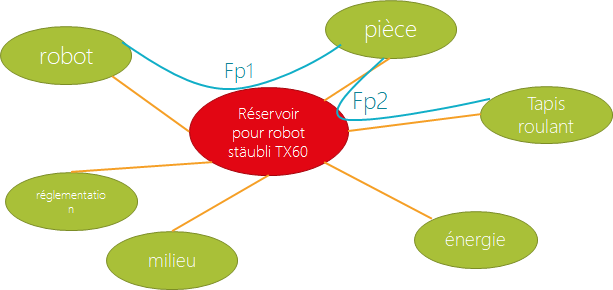
tableau détaillants les fonctions primaires et secondaire à réaliser
| Repères | Fonctions | critères |
| FP1 | Stocker les pièces par couleurs dans des compartiments | Architecture et milieu |
| FP2 | Libérer les pièces de façon aléatoire | Arduino et architecture |
| FC1 | Doit tenir dans la zone de travail | compact |
| FC2 | Doit être programmable par un pc | Programmable |
| FC3 | Doit fonctionner automatiquement | autonome |
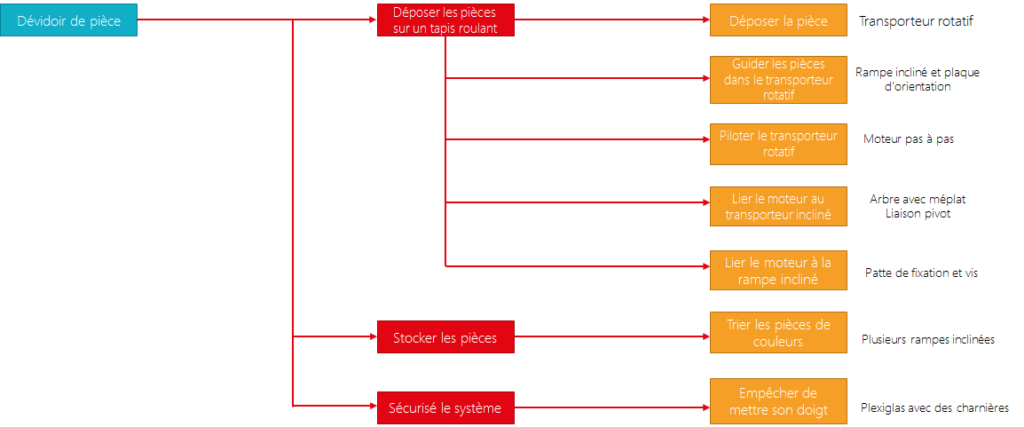
3) Diagramme FAST
Avec la réalisation de ce diagramme Fast, nous avons le détails des fonctions primaires et comment les réaliser.
4) Achats et appareils utilisés
Voici le détail des achats réalisé dans le cadre du projet du support de pièce pour le Robot STAUBLI.p

5) Partie programmation
(La majeure partie des programmes ne sont pas compatible avec WordPass. M. CUDEL possède les programmes originaux.)
a) côté réservoir ( Arduino )
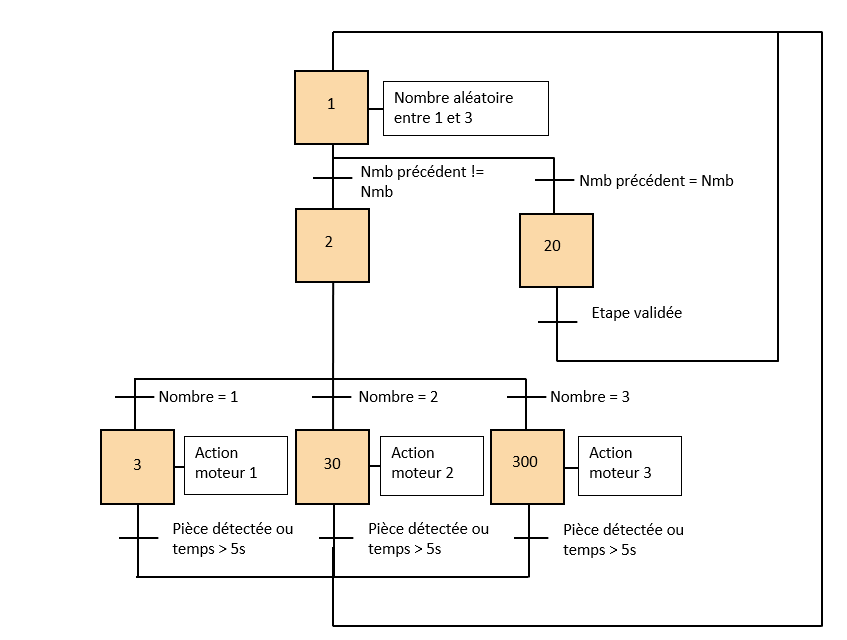
Ci-dessous le grafcet détaillant le fonctionnement du programme Arduino pour la libération des pièces de façon aléatoire.
Ci dessous le programmes Arduino qui s’occupe de la libération des pièces de façon aléatoire.
b) côté Robot/Vision
1)In sight Cognex
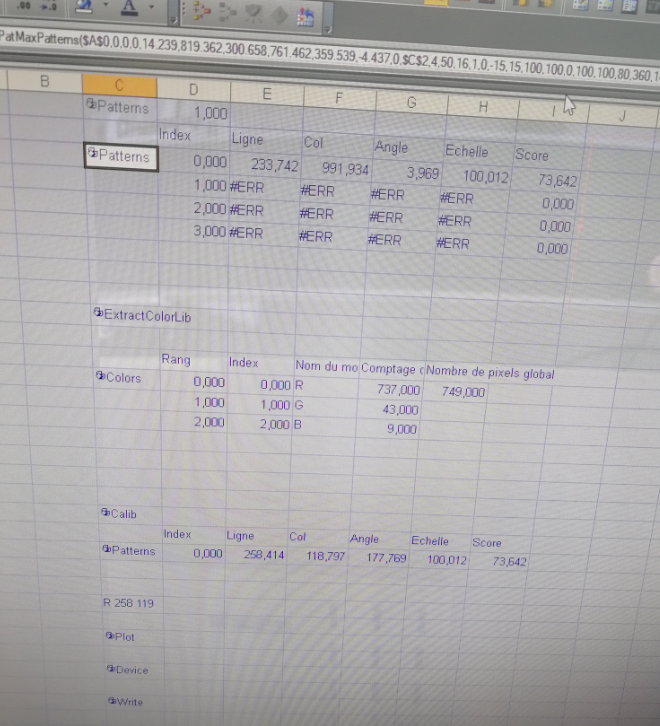
Voici le tableur de la partie vision sur le logiciel « In sight ». La caméra utilisé est une caméra couleur. Les programmes In-sight n’étant pas compatible avec WordPress, nous avons décidé de mettre les programmes sous forme de captures d’écrans.
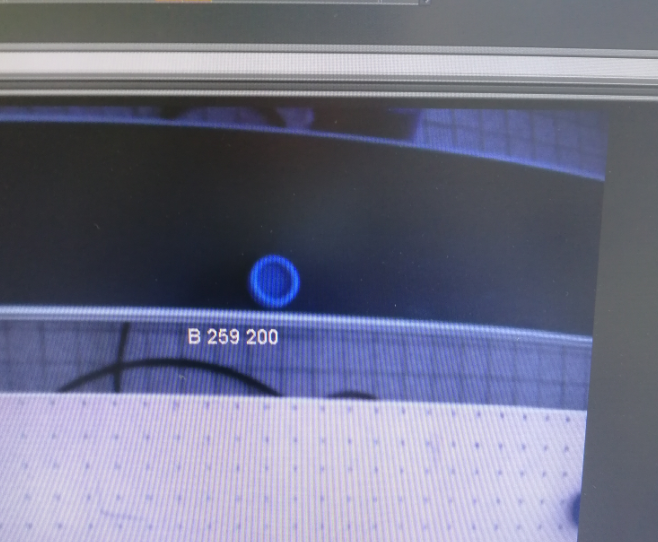
détection de la couleur + coordonnées d’une pièce bleu sur le tapis.
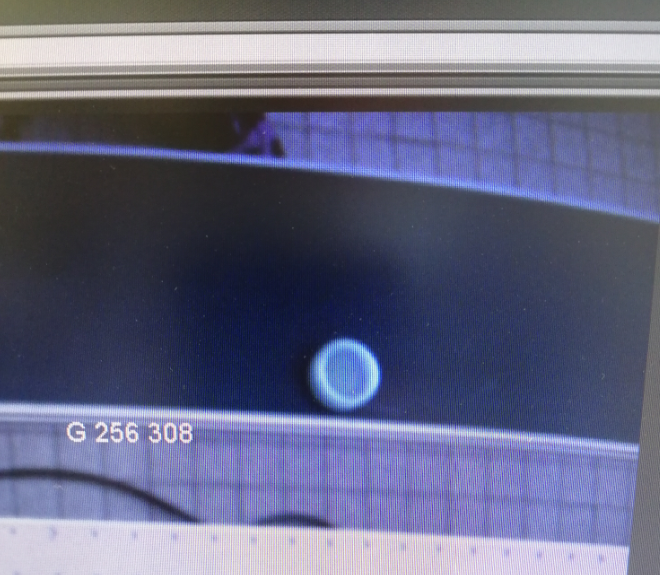
détection de la couleur + coordonnées d’une pièce verte sur le tapis.
détection de la couleur + coordonnées d’une pièce rouge sur le tapis.
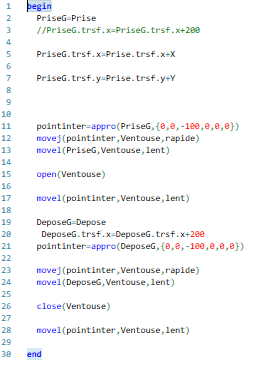
2) Staubli
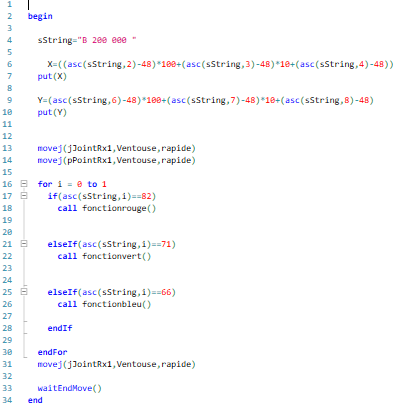
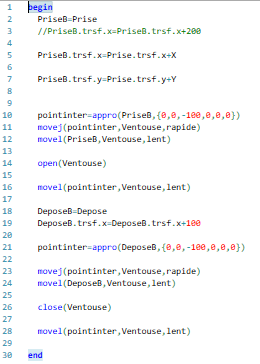
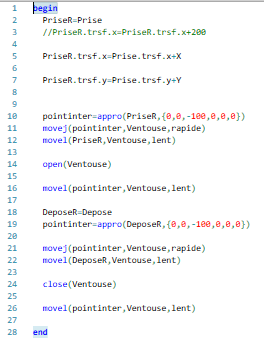
Pour des raisons de non compatibilité, les programmes sont mis sous formes de captures d’écrans.
Nous retrouvons trois programmes pour les prises pièces des trois couleurs Et un programme qui simule la caméra Cognex (envois de coordonnées X,Y et la couleur présente(B,G,R)) . N’ayant pas réussit à connecter la partie Staubli à la partie In-sight, nous avons décidé de simuler la caméra directement sur le logiciel Staubli avec les même chaines de caractères.
6) Partie TEST
a) côté réservoir ( Arduino )
Voici une vidéo qui montre le bon fonctionnement du réservoir de pièce. Nous pouvons voir que la libération des pièces se fais de façon aléatoire et qu’il n’est pas possibles d’avoir deux pièces identiques à la suite. Si aucune chute de pièce est détectée au bout de 5 secondes, le moteur s’arrête.
b) côté Robot/Vision
7) Conclusion
Ce projet fut très intéressant, il nous a permis d’appliquer les connaissances de In-sight et Staubli vu en cours directement sur un projet concret.
Je vois quelques points à travailler pour améliorer ce projet notamment:
– Passer sur un automate serait une bonne idée
– surveillé la consommation des moteurs (passer sur des moteurs à courant continu pour limiter la consommation)
– Minimiser la chauffe des moteurs pour pouvoir faire tourner l’installation pendant une période plus longues.
Intégration d’un capteur de détection pièce
A côté du projet précédent, qui est un plan incliné pour la distribution de pièces pour la robotique manufacturière, nous avons procédé à l’intégration d’un capteur pouvant détecter la présence d’une pièce. Ce capteur est intégré au sein de la pince robot, au niveau des mors.

Ce capteur sera un simple interrupteur cylindrique intégré à l’un des mors. Cette intégration devra être étudiée à l’IUT Lab.

interrupteur cylindrique
Le câblage de celui-ci est de préférence unipolaire, ce qui comprend une alimentation et un retour d’information. Pour effectuer ce câblage il faut utiliser les connecteurs J1203 sur l’avant bras du robot et J1202 sur le pied ainsi que sur la CPU. Les connecteurs à utiliser seront de la marques Binder Connector dans la gamme miniature. Ils seront de 19 broches en M16. Le format mâle est appliqué à l’avant bras et à la CPU. Tandis que le format femelle est adapté au connecteur sur le pied.
MARHEM Rémi
ENGGASSER Geoffrey
ROOS Hugo
MULLER Lucas