
Nao aide à la rééducation des personnes âgées
Sommaire:
Membres de l’équipe
Présentation
Introduction
Matériel à disposition
Le robot Nao
Le cahier des charges
Diagramme de la bête à cornes
Diagramme pieuvre
Gestion de projet
Développement du projet
Approfondissements techniques
Problèmes rencontrés
Conclusion
Membres de L’équipe :
Toussaint Raphaëlle et Dusausay Laura en première années de DUT GEII de Mulhouse sont fières de vous présenter leur projet de second semestre.
Présentation :
Au début du second semestre de la première année, tous les élèves exerçants cette poursuite d’études sont amenés à réaliser un projet qui leur est imposé. Les heures de travail sont comprises dans l’emploi du temps et comptent à peu près une soixantaine d’heures. Cela nous permet d’acquérir de nombreuses compétences et de nous perfectionner dans plusieurs domaines tels que la programmation et la connectivité, mais aussi d’apprendre le langage python ainsi que le logiciel Chorégraphe pour piloter NAO.
Introduction :
Cette année L’EHPAD souhaiterai investir dans un robot Nao. Le but de celui-ci serait de venir en aide à l’ergothérapeute en faisant les mouvements demandés.
Ainsi nous rentrons en jeu ! Notre rôle est de programmer un robot NAO afin de faire une représentation lors d’une séance avec l’ergothérapeute. Ce qui permettra à l’EHPAD d’investir ou non dans un robot.
Matériel à disposition :
Pour ce projet nous avons à notre service 4 robots Nao, le logiciel choregraphe, une imprimante laser et une en couleur. Ayant déjà tout le matériel nécessaire pour réaliser ce projet nous n’avons aucun budget supplémentaire à notre disposition.
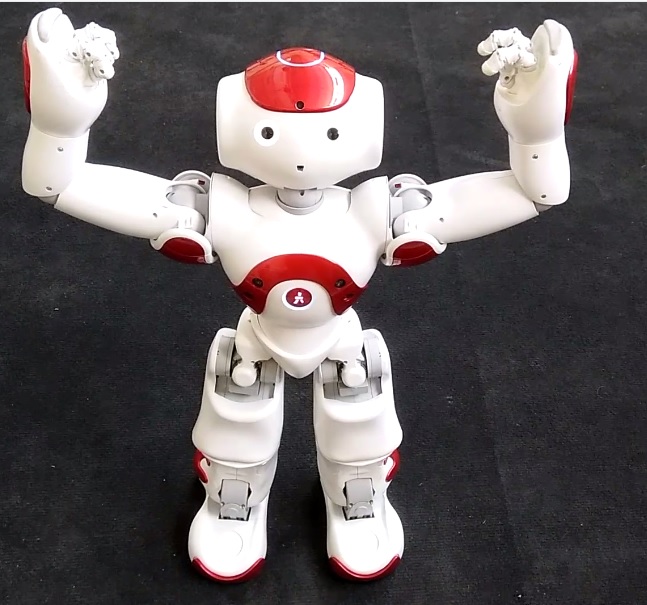
Le robot Nao :
Ce robot est un robot humanoïde créé par l’entreprise familiale française Aldebaran Robotics. Il contient une multitude de capteurs qui lui permettent au mieux de recréer les mouvements humains et qui lui permettent d’être très autonome. Il peut par exemple reconnaître qu’il est couché sur le sol et peut ainsi se relever sans difficultés. Il est ainsi doté de 4 capteurs à ultrasons sur le torse, deux caméras Haute Définition, 8 capteurs de pression, des bumpers sur les pieds ainsi que d’un accéléromètre et d’un gyromètre. Il a un poids total de 4,8 kg. Il a un “cerveau” qui est programmable à l’aide du logiciel “Choregraphe”.Celui-ci a une interface simplifiée faite de boîtes pré-programmés. Ainsi ce logiciel est facile à prendre en mains au départ. Évidemment dès que l’on veut personnaliser les boîtes, approfondir le programme, il faut commencer à coder.

Cahier des charges:
Nous devons, pour ce projet, respecter un cahier des charges défini par l’ergothérapeute lors d’une réunion qui se déroulait une semaine avant le démarrage des deux semaines de projet. Dans ce cahier des charges nous retrouvons:
- La liste des mouvements à reproduire
- Les mouvements ne doivent pas être trop rapide
- Le robot doit expliquer le mouvement à faire et doit compter le nombre de répétitions d’une voix lente et forte
- Le robot doit être facile d’utilisation et doit pouvoir se commander oralement ainsi que visuellement à l’aide de pancartes.
- Le robot doit pouvoir répéter les mouvements 10 fois
- Le robot doit avoir une autonomie suffisante pour tenir 1h sans recharge
- La séance doit pouvoir être personnalisable en choisissant les mouvements voulu et pas avoir toujours la même série d’exercices
- Le programme doit être finalisé avant le 18 juin, date de la soutenance finale
Diagramme de la bête à cornes:
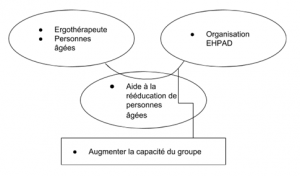
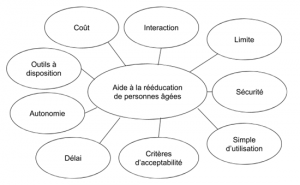
Diagramme pieuvre:
Gestion de projet:
Afin de mener à bien ce projet, il a fallu s’organiser intelligemment. Nous nous sommes tout d’abord distribuée les différents mouvements à créer, puis DUSAUSAY Laura s’est occupée de l’interaction visuelle avec le robot à l’aide de pancartes, TOUSSAINT Raphaëlle s’est occupée de l’interaction vocale avec le robot. Ces deux semaines étaient vraiment très remplies puisque nous travaillions sur ce projet tous les jours de 8h30 jusqu’à 17h45.
Développement du projet:
Il a tout d’abord fallu nous familiariser avec le logiciel “Choregraphe” qui est un logiciel plutôt simple d’utilisation. Grâce à un document fourni par notre professeur, nous avons pu nous entraîner à programmer différents mouvements de la tête, des bras, des poignets et des doigts. Avec ce logiciel nous avons aussi dû programmer en Python, par chance nous connaissions déjà un peu ce langage de programmation.
Nous avons donc commencé ces deux semaines de projet par une journée de programmation des différents mouvements ainsi que le fait de pouvoir enchaîner un même mouvement 10 fois. Nous avons ensuite dû penser à la façon de programmer NAO pour qu’il comprenne ce qu’on lui dit, qu’il nous réponde puis qu’il fasse l’action demandée. En parallèle, nous avons dû réfléchir à la façon dont le NAO pourrait reconnaître un mouvement visuellement. Nous sommes donc parties sur l’idée de pancartes que le NAO devra reconnaître. Une fois la pancarte reconnue, il devra expliquer le mouvement voulu et le faire 10 fois.
Une semaine plus tard, l’ergothérapeute est revenue nous voir pour constater l’avancée de notre projet et nous donner les points à améliorer. Suite à cette réunion nous avons conclu que le robot parlait trop vite et que ses mouvements étaient trop rapide, elle nous a aussi demandé que le NAO puisse compter le nombre de fois qu’il a fait le mouvement, qu’il puisse se lever en début de séance afin de se présenter et qu’il se mette assis après avoir remercié les personnes de l’avoir écouté.
Choses promises, choses dues, elle revient nous voir le dernier jour de projet pour voir l’aboutissement de notre travail qu’elle a trouvé très satisfaisant. Nous avons ainsi convenu un rendez-vous à l’EHPAD afin de faire une présentation à plusieurs résidents.
Ce moment tant attendu est enfin arrivé, le stress était palpable, les résidents allaient-ils aimer l’idée d’un robot qui les aide dans la rééducation? La séance se déroule avec malheureusement quelques petits problèmes techniques. Le personnel de l’EHPAD était épanoui et heureusement pour nous les résidents l’étaient aussi!!! Ils avaient juste une crainte, celle que le robot remplace définitivement l’ergothérapeute, mais le directeur leur a expliqué qu’il ne sera qu’une aide et ne remplacera jamais aucun employé de l’EHPAD, alors les résidents étaient ravis.
Approfondissements techniques:
Nous allons vous expliquer plus en détail comment nous avons réalisé les mouvements, l’interface audio ainsi que visuelle.
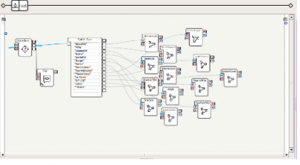
1.Mouvements:
Nous avons réalisé nous même les mouvements que nous avons besoin pour ce projet. Pour ce fait nous avons utilisé la fonction “ timelines” . Celle-ci donne sur un Nao virtuel que nous pouvons positionner comme on le souhaite, et enregistrer sa position.
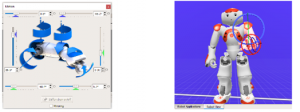
Chaque séquence de 1 mouvement fut enregistré dans un dossier séparé, eux même inclus dans un dossier contenant une boucle (10 répétitions des mouvements), une fonction “say” (pour que le Nao explique le mouvement).
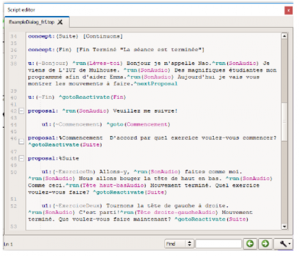
2.Interface audio:
L’interface audio est réalisée à partir d’un “Qichat” codé en python. Qichat permet d’avoir une interaction vocale avec le robot. Pour ce fait nous avons enregistré les différentes phrases types que Nao reconnaît comme un déclencheur d’exercices ou de réponses.
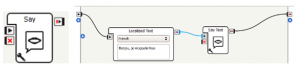
3.Interface visuelle:
Le Nao possède une vision HD mais celui-ci ne sait pas lire. Il se contente de reconnaître les formes et les couleurs qu’il voit. Ainsi nous avons fabriqué des tablettes pour chaque exercice. Ces tablettes de format A5 contiennent un nuage de mot représentant une forme avec des couleurs différentes.

Avec la fonction “vision recognize” nous avons enregistré chaque image/tablette dans la banque de données du Nao. Ensuite avec un “switch cases” nous avons associé les images à une série d’exercices eux même enregistrés dans sa base de données.
Problèmes rencontrés:
Dans ce projet le problème majeur fut dans le codage du Qichat. En effet celui-ci ne reconnaissait pas le compteur et ils nous était impossible de régler la voix. De plus la reconnaissance vocale du Nao étant très faible il nous était difficile d’avoir un résultat fiable, c’est pourquoi nous avons opté pour une solution alternative: la reconnaissance visuelle.
Mais nous avons eu quelques problèmes également pour la reconnaissance visuelle. En effet lors de la réalisation nous avons toujours eu les mêmes contraintes environnementale (forte luminosité, salle calme…) Ainsi lorsque nous avons présenté notre projet à l’EHPAD, la luminosité de la salle étant plus faible la reconnaissance des tablettes/images fut laborieuse.
Conclusion:
Malgré les difficultés rencontrées nous avons réussi à terminer notre projet et même aller au delà en faisant une démonstration à l’EHPAD.
Nous sommes ravies d’avoir pu travailler avec des professionnels. Cela fut très enrichissant et concret. Nous avons pu lier la programmation, l’interaction Homme/machine ainsi que la demande de l’employeur. Nous remercions donc l’EHPAD de l’arc à Mulhouse de nous avoir fait confiance, l’ergothérapeute qui nous a suivis durant ce projet pour adapter au mieux l’interaction avec le Nao. Nous tenons également à remercier notre tuteur de projet M.Cudel.
