

Projet Maquette Énergie :
Onduleur
GEII 1A 2015-2016 MULHOUSE
Sommaire :
-
L’équipe
-
Présentation du Sujet
-
Définitions des termes scientifiques
-
Tension électrique
-
Intensité électrique
-
Résistance
-
Tension alternative
-
Tension continue
-
Puissance électrique
-
Circuit de puissance
-
Circuit de commande
-
Amplificateur oppérationnel
-
Onduleur
-
MLI (PWM)
-
-
Exemple d’utilisation d’un onduleur
-
Étude du cahier des charges partiel
-
Cahier des charges
-
Diagramme Bêtes à cornes
-
Diagramme Pieuvre
-
Liste des fonctions
-
-
Gestion de Projet
-
WBS
-
GANTT (Prévisionnel)
-
GANTT (Effectué)
-
-
L’évolution du projet
-
Le Projet plus en détail
-
Étude du circuit de commande
-
Trigger de SCHMITT
-
Intégrateur
-
Assemblage des deux montages
-
MLI (Origine)
-
MLI
-
MLI Complémentée
-
-
Simulation LTSPICE
-
Étude du circuit de puissance
-
Fonctionnement (simplifié) des transistors
-
Résistances de base
-
Radiateur
-
Fonctionnement de la partie puissance
-
-
Simulation plaquette
-
Étude financière
-
Réalisation (Kicad)
-
Partie Commande
-
Partie Puissance
-
-
Impression circuits imprimés
-
Nos circuits
-
La commande
-
La puissance
-
-
Conception du schéma synoptique
-
-
Montage de l’onduleur
-
Pose du synoptique et ajout des douilles
-
Fixation des circuits
-
Câblage
-
Assemblage
-
-
Réalisation du dossier
-
Bilan
-
Exemple d’application de l’onduleur (sur un moteur)
-
Schéma bilan
-
-
Mode d’emploi
-
Alimentation du boitier
-
Points de mesure
-
Fonctionnement
-
-
Conclusion
-
Remerciements
L’équipe :
Omeid EHSAN Valentin COLLIN Chef de projet : Yvan HANSER Emmanuel SCHEIDEGGER
Présentation du Sujet :
Réalisation d’une maquette pédagogique pour l’étude des conversions d’énergies, en l’occurrence conversion continu-alternatif (TP de deuxième année). L’onduleur est souvent utilisé en bout de réseaux de panneaux solaire ou d’éolienne afin de convertir une tension continue en tension alternative, il peut aussi avoir bien d’autres usages comme l’utilisation en variateur de vitesse pour le pilotage d’un moteur.
Objectif:
- Réalisation d’une maquette pédagogique
But:
- L’étude des conversions d’énergies (TP de deuxième année)
Client:
- Equipe pédagogique GEII
Contraintes:
- Maquette pédagogique
- Mesures grandeurs électrique
- Comprendre le fonctionnement (visible sur la maquette)
- Puissance: entre 75W – 100W
- Tension +/-15V
- Composants amovibles
Définitions des termes scientifiques :
1) Tension électrique :
- Circulation du champ électrique le long d’un circuit
- Mesurée en volt
- Notée U
2) Intensité (ou courant électrique) :
- Déplacement d’ensemble de porteurs de charges électriques
- Mesurée en ampère
- Notée I
3) Résistance :
- Grandeur caractérisant la « force » avec laquelle le conducteur s’oppose au passage du courant.
- Exprimée en ohms Ω
- Notée R

4) Tension alternative :
- Tension variable qui prend alternativement des valeurs positives puis négatives

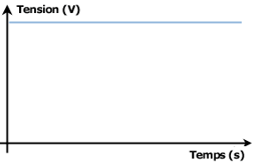
5) Tension continue :
- Tension qui garde même signe et même valeur au cours du temps
6) Puissance électrique :
- Représente la force motrice de l’électricité
- Produit de la tension électrique aux bornes de laquelle est branchée l’appareil
- Produit de l’intensité du courant électrique qui le traverse
- Notée P
- Exprimé en watt
7) Circuit de puissance :
- Adapter les tensions et courants à l’usage voulu
8) Circuit de commande :
- Mise en forme des signaux
- Commande du circuit de puissance
9) Amplificateur opérationnel :
- Un amplificateur opérationnel est un amplificateur différentiel : c’est un amplificateur électronique qui amplifie une différence de potentiel électrique présente à ses entrées.
10) Onduleur :
- Un onduleur est un dispositif d’électronique de puissance permettant de fournir des tensions et des courants alternatifs à partir d’une source d’énergie électrique de tension ou de fréquence différente. C’est la fonction inverse d’un redresseur. L’onduleur est un convertisseur statique de type continu/alternatif.
11) MLI:
- Une modulation de largeur d’impulsions (MLI ou PWM en anglais) est une technique couramment utilisée pour synthétiser des signaux continus à l’aide de circuits à fonctionnement tout ou rien, ou plus généralement à états discrets. Le principe général est qu’en appliquant une succession d’états discrets pendant des durées bien choisies, on peut obtenir en moyenne sur une certaine durée n’importe quelle valeur intermédiaire.
Sources :
- https://fr.wikipedia.org/wiki/Modulation_de_largeur_d%27impulsion
- https://fr.wikipedia.org/wiki/Amplificateur_op%C3%A9rationnel
- http://for-ge.blogspot.fr/2015/08/londuleur.html
Exemple d’utilisation d’un onduleur :
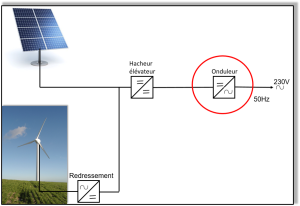
Voici un exemple d’utilisation d’un onduleur.
-Soit un panneau solaire photovoltaïque nous délivre une tension continue qui est ensuite élevée par le biais d’un hacheur flyback. L’onduleur récupère cette tension continue pour ensuite la convertir en une tension alternative.
-Soit une éolienne nous délivre une tension alternative qui est ensuite converti en une tension continue par le biais d’un redressement. Un redresseur effectue l’effet inverse d’un onduleur. Ensuite la tension continue est élevée par un hacheur flyback ainsi l’onduleur récupère cette tension continue pour la convertir en une tension alternative.
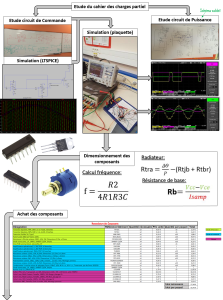
Étude du cahier des charges partiel
Étape cruciale qui permet, la prise de connaissance des impératifs à respecter, et de garantir que tous les acteurs du projet se soient mis d’accord. Elle est la première étape de la rédaction du cahier des charges pas les acteurs du projet, les « impératifs » seront décrit dans la cahier des charges qui suit.
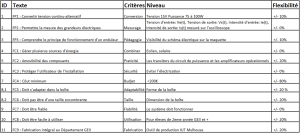
Cahier des charges :
Diagramme bêtes à cornes
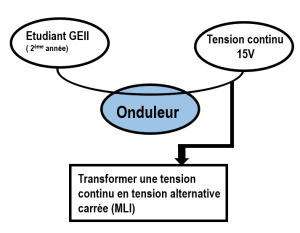
Diagramme pieuvre
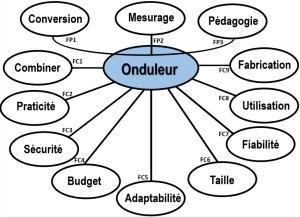
FP : Fonction principale
FC : Fonction de contrainte
Liste des fonctions
Gestion de Projet :
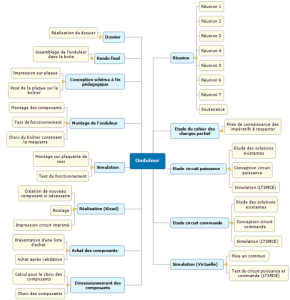
Organigramme WBS
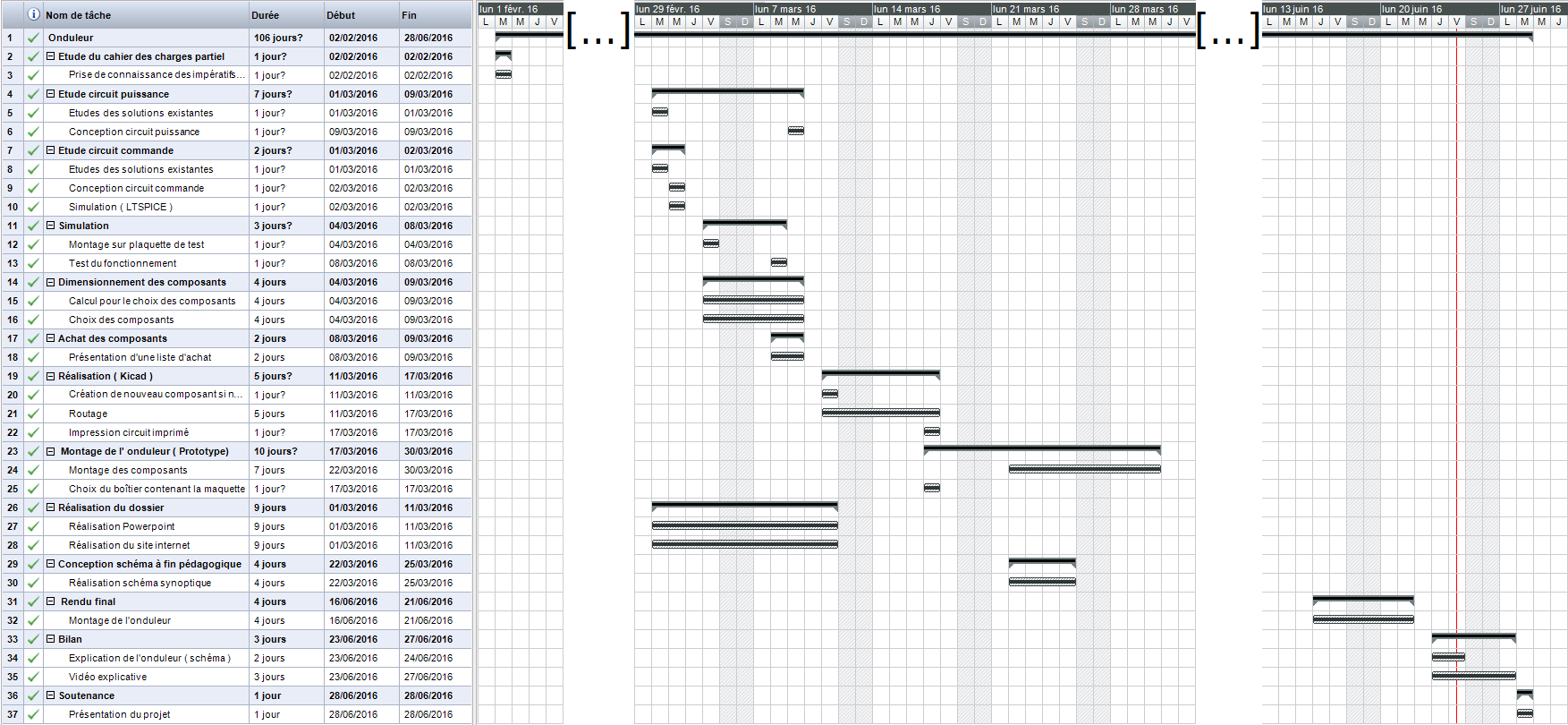
Organigramme de GANTT Prévisonnel
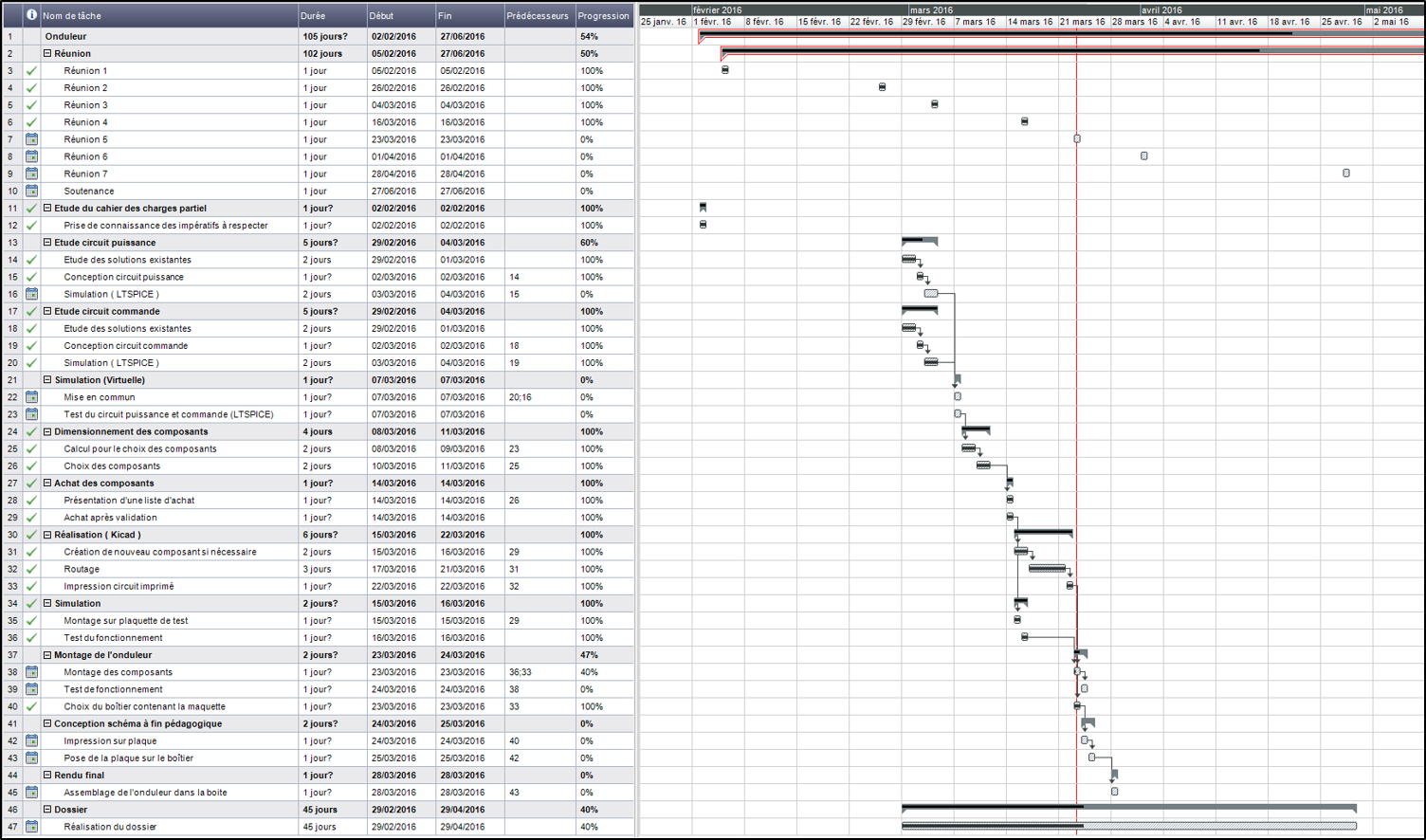
Organigramme de GANTT Effectué
L’évolution du projet :
Le Projet plus en détail :
Étude du circuit de Commande :
Le circuit de commande est un circuit de mise en forme du signal, il nous a fallu étudier dans un premier temps le signal recherché a la sortie de notre montage afin de comprendre comment le créer. La MLI (signal désirée) est obtenue en comparant un signal sinusoïdale (GBF) et un signal triangulaire, il nous faut donc créer un signal triangle mais la création de ce signal triangle nécessite un signal carré. C’est donc en décomposant petit à petit nos signaux qu’il est possible d’obtenir notre MLI. Nous avons du utiliser deux montages : un montage » Trigger de Schmitt » et un montage « intégrateur« , dont voici le détail :
1) Trigger de SCHMITT :
Avec :
- R1 = 1,5 k Ω
- R2 = 10 k Ω
- e = 0 V
- V+ : Tension sur la borne d’entrée + de l’amplificateur.
- V- : Tension sur la borne d’entrée – de l’amplificateur.
- +Vsat : Tension d’alimentation de l’AOP. +Vsat = 15 V
- -Vsat : Tension d’alimentation de l’AOP. -Vsat = -15 V
Le fonctionnement de ce montage est très simple, ça n’est qu’un comparateur :
- Si V+ > V- (en l’occurrence V- = e =0), Vs = +Vsat = 15 V
- Si V+ < V- (en l’occurrence V- = e =0), Vs = -Vsat = -15 V
Avec : V+ =( (Ve x R2)+(Vs x R1)) / (R1 + R2)
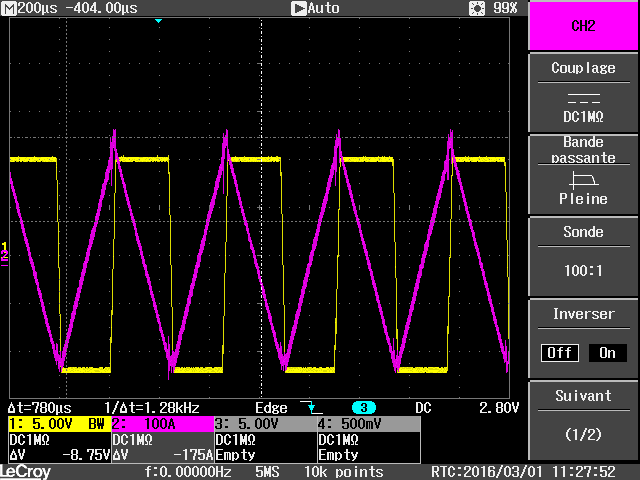
Le Trigger de Schmitt nous permet d’obtenir un signal carré :
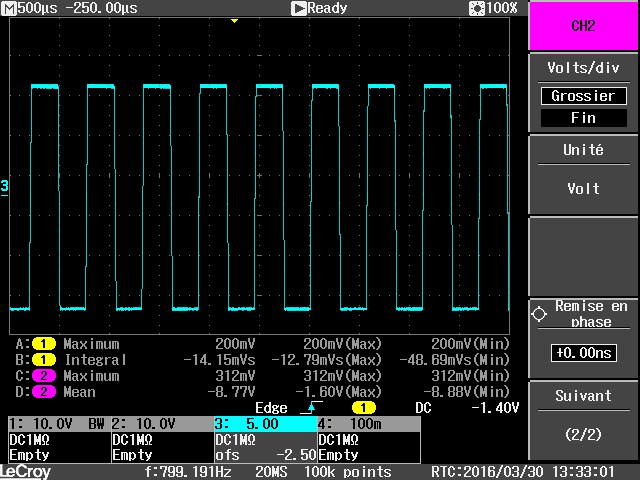
On observe bien nos +15 et -15 V sur le signal.
2) Intégrateur :
Avec :
- R = 1,1 k Ω + Potentiomètre (0 – 10 kΩ)
- C = 100 nF
- V+ : Tension sur la borne d’entrée + de l’amplificateur (en l’occurrence V+ est à la masse).
- V- : Tension sur la borne d’entrée – de l’amplificateur.
- +Vsat : Tension d’alimentation de l’AOP. +Vsat = 15 V
- -Vsat : Tension d’alimentation de l’AOP. -Vsat = -15 V
Avec :
- V+ = R x I
- Vs = (-1/C) x Integrale ( I(t) dt) = (-1/RC) x Integrale ( Ve(t) dt)
L’ intégrateur nous permet d’obtenir un signal triangulaire :
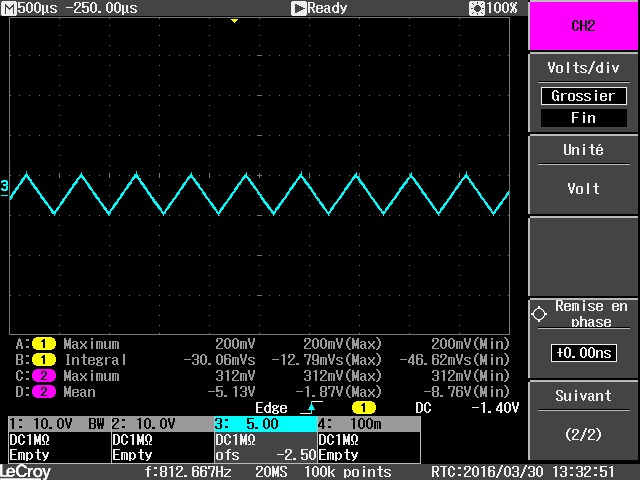
Les valeurs maximales et minimales de notre signal triangulaire seront explicitées dans la partie suivante.
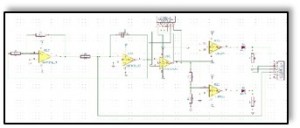
3) Assemblage des deux montages :
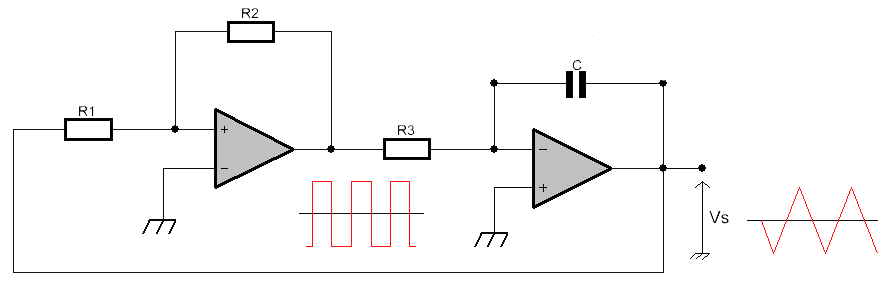
Avec :
- R1 = 1,5 k Ω
- R 2 = 10 k Ω
- R3 = 1,1 k Ω + Potentiomètre (0 – 10 kΩ)
- C = 100 nF
- V+ : Tension sur la borne d’entrée + de l’amplificateur.
- V- : Tension sur la borne d’entrée – de l’amplificateur.
- +Vsat : Tension d’alimentation de AOP. +Vsat = 15 V
- -Vsat : Tension d’alimentation des AOP. -Vsat = -15 V
Notre cahier des charges nous impose une fréquence de l’ordre de 1500 Hz, çi dessous la démonstration pour arriver à la formule de la fréquence :
On a :
- VmaxIntégrateur = VH = (R1/R2) x Vsat = (1,5/10) x 15 = 2,25 V
- VminIntégrateur = VB = -(R1/R2) x Vsat = -(1,5/10) x 15 = -2,25 V
Pour arriver à la fréquence nous devons mettre en équation les deux pentes :
Pente 1 : Vs = (Vsat / (R3 x C) ) x t – VB = (Vsat / (R3 xC)) x t – (R1/R2) x Vsat
Pente 2 : Vs = -(Vsat / (R3 x C) ) x t + (Vsat / (R3 x C) ) x (T/2) + VH = -(Vsat / (R3 x C) ) x t + (Vsat / (R3 x C) ) x (T/2) + (R1/R2) x Vsat
Pour t = T/2 : (On voit sur le graphique que la pente 1 est égale à la pente 2)
Pente 1 = Pente 2 : (Vsat / (R3 xC)) x (T/2) – (R1/R2) x Vsat = -(Vsat / (R3 x C) ) x (T/2) + (Vsat / (R3 x C) ) x (T/2) + (R1/R2) x Vsat
<==> (Vsat / (R3 xC)) x (T/2) – (R1/R2) x Vsat = (R1/R2) x Vsat
<==> T / (2 x R3 x C) = (2 x R1) / R2
<==> T = (4 x R1 x R3 x C) / R2 or f = 1 / T
=> f = R2 / (4 x R1 x R3 x C)
Application numérique :
- R1 = 1,5 k Ω
- R 2 = 10 k Ω
- R3 = 1,1 k Ω + Potentiomètre (0 – 10 kΩ)
Potentiomètre à 0 kΩ :
f = 10k / (4 x 1,5k x 1,1k x 100n) = 15151 Hz
Potentiomètre à 10 kΩ :
f = 10k / (4 x 1,5k x (1,1k + 10k) x 100n) = 1501 Hz
Le carré et le triangle de nos montage une fois assemblés :
Nous avons notre signal carré et notre triangle, il est temps de passer à la création de la MLI :
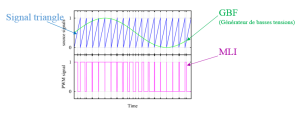
4) La MLI est obtenue en comparant un signal sinusoïdale (GBF) et un signal triangulaire :
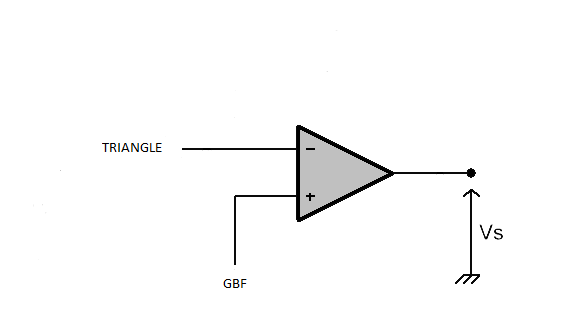
Sur le graphique çi dessous on comprends aisément comment la MLI est obtenue :
- Si GBF > TRIANGLE, Vs = +Vsat = 15 V
- Si GBF < TRIANGLE, Vs = -Vsat = -15 V
Ci-dessous on comprends aisément comment la MLI est obtenue :
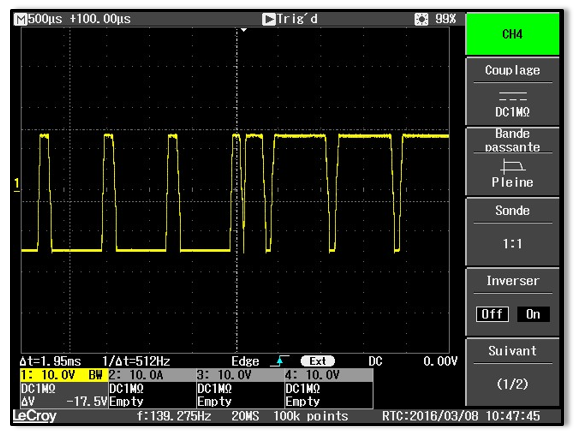
MLI obtenue grâce à la partie commande (On a bien +15 V et -15 V).
Nous avons tester la MLI avec différentes formes de signaux générés par le GBF. Ci-dessous la moyenne de la MLI pour chaque signal du GBF.
Obtenu à l’aide d’un signal carré en sortie de GBF, on observe bien que la moyenne de la MLI (en jaune) se rapproche d’un signal carré.
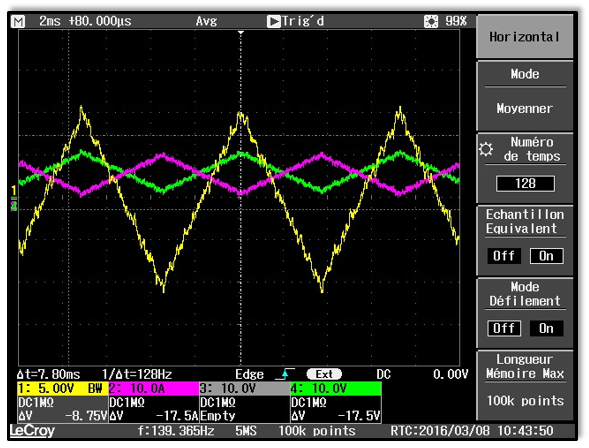
Signal triangle en sortie de GBF.
Et enfin :
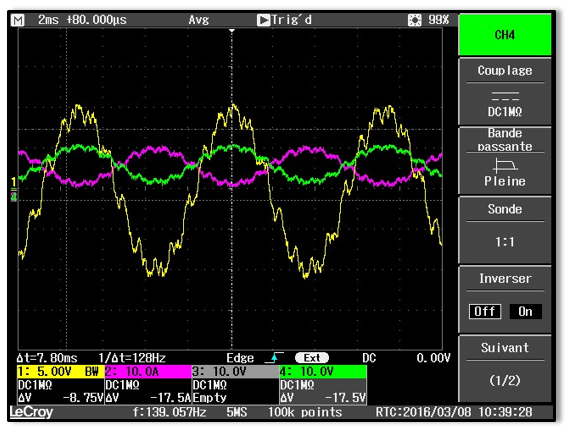
La sinusoïde ! C’est la l’objectif du projet puisqu’on a bien créer une tension alternative à partir d’une tension continue, mais pour faire fonctionner la partie puissance, nous avons besoin de la MLI mais aussi de son complément (toutes deux avec uniquement des valeurs positives) :
5) Pour la MLI :
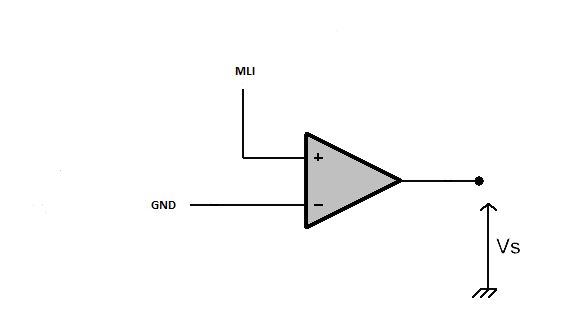
Avec :
- +Vsat : Tension d’alimentation de AOP. +Vsat = 15 V
- -Vsat : Tension d’alimentation des AOP. -Vsat = -15 V
Si MLI > GND : Vs = +Vsat = 15 V
Si MLI < GND : Vs = -Vsat = -15 V
Remarque :
On a toujours une MLI positive et négative.
6) Pour le complément de la MLI :
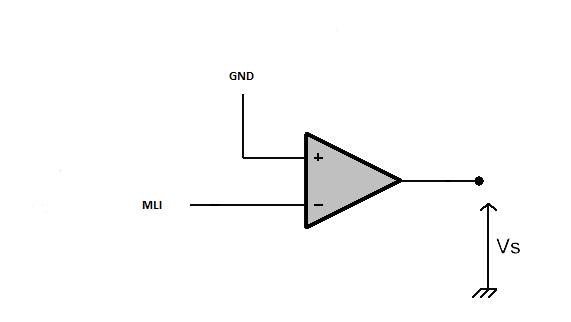
Avec :
- +Vsat : Tension d’alimentation de AOP. +Vsat = 15 V
- -Vsat : Tension d’alimentation des AOP. -Vsat = -15 V
Si MLI < GND : Vs = +Vsat = 15 V
Si MLI > GND : Vs = -Vsat = -15 V
Remarque :
La partie positive de notre MLI d’origine devient négative et sa partie négative devient positive.
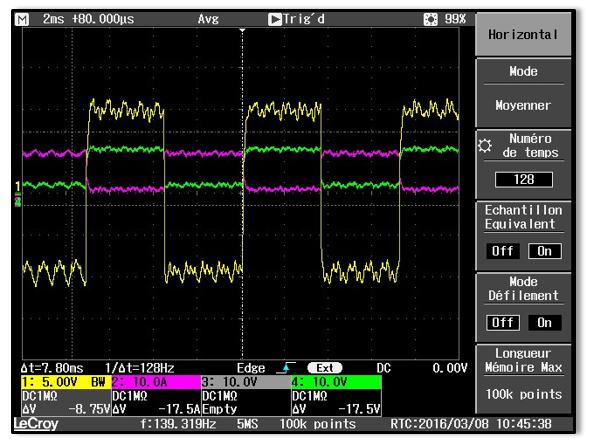
Ces parties négatives ne sont pas désirées, on les supprime donc en ajoutant une diode à la sortie de chacun des AOP. Une fois fait on obtient ces signaux :
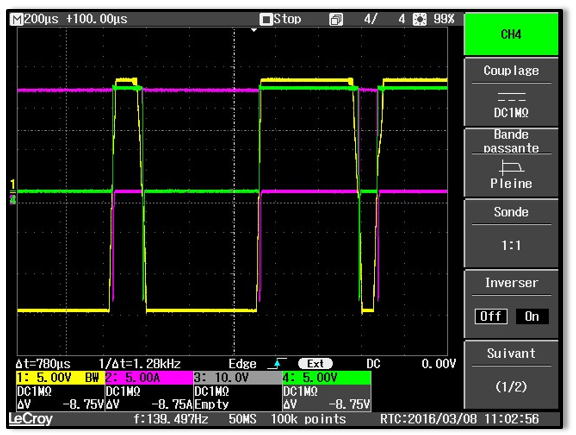
Le signal jaune est la MLI d’origine, le signal vert représente la MLI privé de sa partie négative et le signal rose représente la partie négative de la MLI d’origine mais complémenté, on voit bien que quand le signal vert est a son niveau haut, le signal rose est à son niveau bas et inversement. C’est ces signaux (Rose et vert) qui nous permettrons de piloter la partie puissance ( détail du fonctionnement dans l’étude de la partie puissance).
La partie commande est terminée.
Sources :
http://electronique.aop.free.fr/AOP_sature/10_triangle.html
Simulation (LTSPICE):
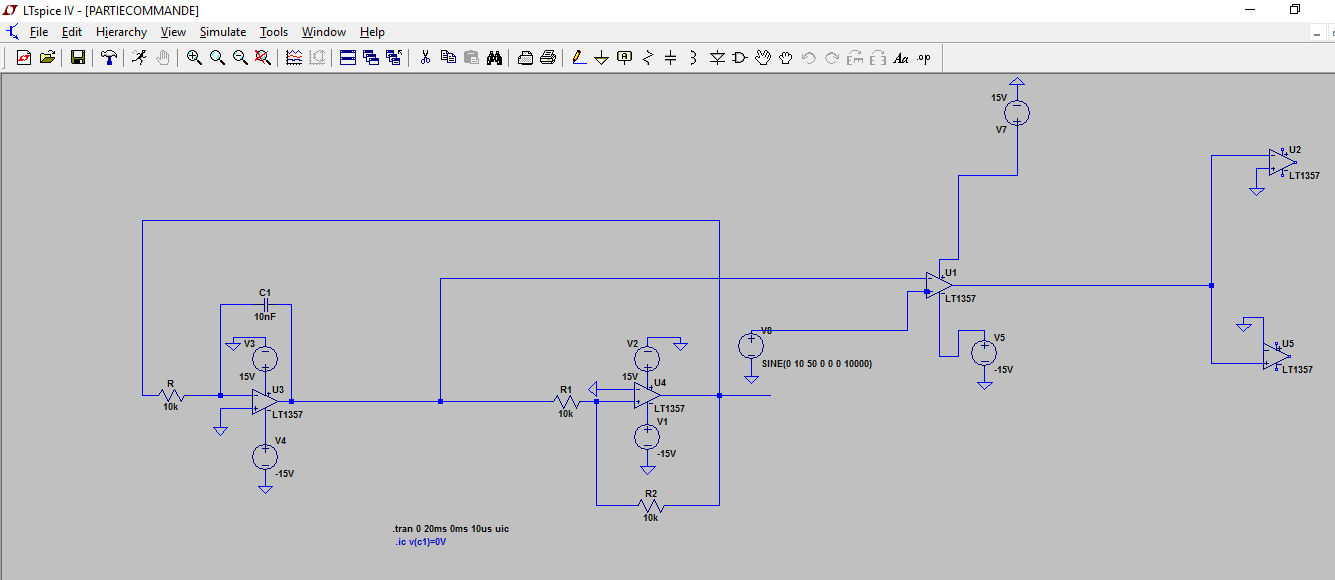
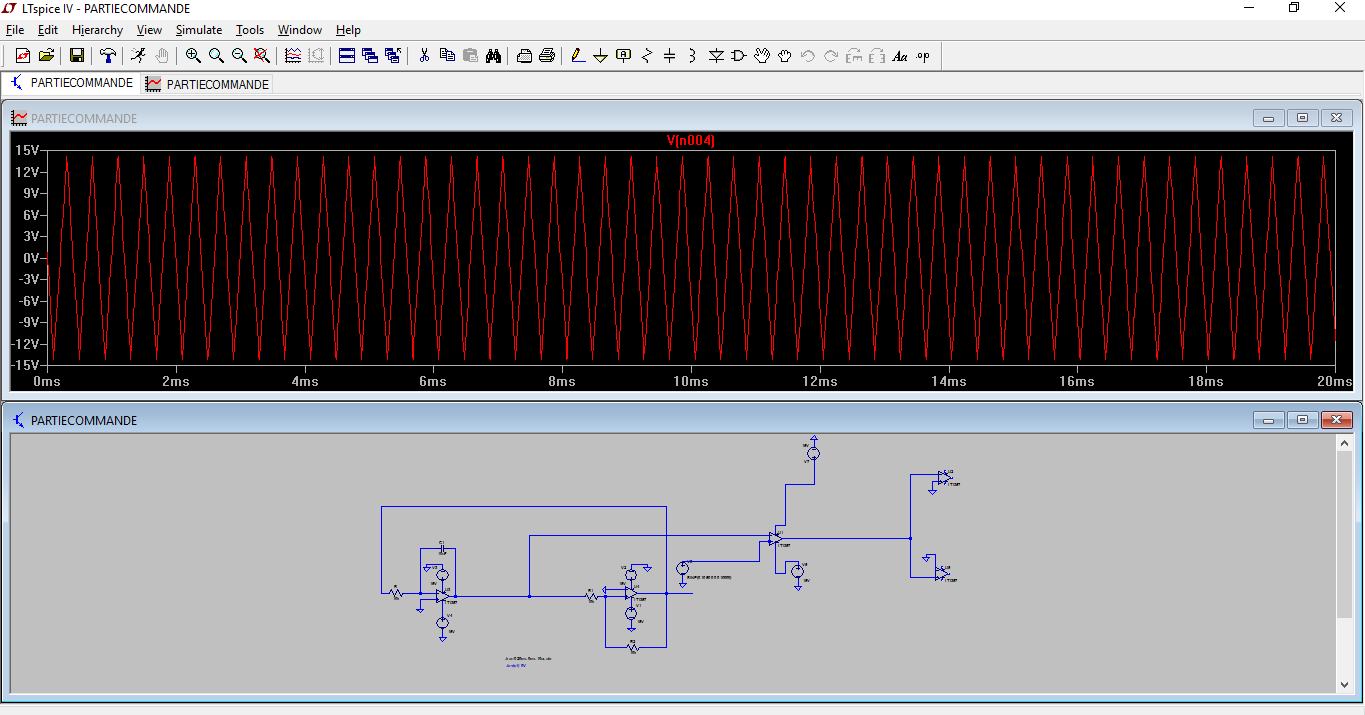
Le logiciel LTSPICE permet de simuler toute sorte de montage électronique, nous l’avons utilisé afin de simuler et de bien comprendre le fonctionnement de la partie commande, ils nous a d’ailleurs permit d’observer l’influence de nos différents composants sur nos signaux (Amplitude, fréquences, etc…).
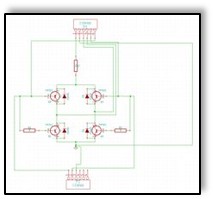
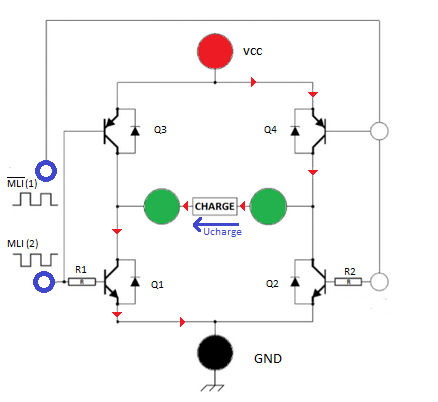
Étude du circuit de Puissance :
L’étude du circuit puissance s’est avérée très simple puisqu’il s’agit d’un pont en H composé de transistor NPN, PNP et de diode piloté par la MLI de la commande. Les deux transistor sont alimenté par la MLI, or ils doivent commuter en opposition, les deux NPN ne doivent jamais être saturé en même temps. Un NPN est donc alimenté avec la MLI alors que l’autre est alimentée avec la complémentation de la MLI.
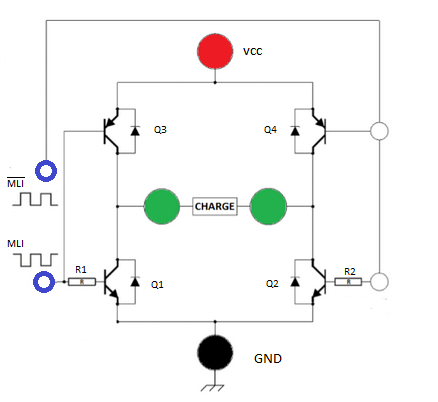
Avec :
- VCC = 15 V
- Q1, Q2 : Transistors NPN
- Q3, Q4 : Transistors PNP
- R1, R2 : Résistances de base
Pour comprendre le fonctionnement du montage il est important d’avoir les notions de bases sur le fonctionnement des transistors bipolaires. Dans notre cas on peut dire qu’il s’agit « d’interrupteur commandé ».
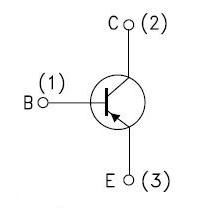
1) Fonctionnement ( simplifié) des transistors :
1.1) Transistor NPN : (Dans notre cas : TIP31C)
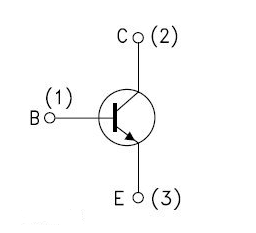
Avec :
- B : Base
- C : Collecteur
- E : Emetteur
- VB : Tension appliquée à la base
- VE : Tension appliqué à l’émetteur
Si VB > 0 et VB > (VE + 0,7) : On dit que le transistor est passant (ou saturé), le courant est libre de circuler du Collecteur à l’Emetteur. (Interrupteur fermé)
Si VB < 0 ou VB < (VE + 0,7) : On dit que le transistor est bloqué, le courant ne peut pas circuler entre le Collecteur et l’Emetteur. (Interrupteur ouvert)
1.2) Transistor PNP : (Dans notre cas : TIP32C)
Avec :
- B : Base
- C : Collecteur
- E : Emetteur
- VB : Tension appliquée à la base
- VE : Tension appliqué à l’émetteur
Si VB < 0 et VB < (VE + 0,7) : On dit que le transistor est passant (ou saturé), le courant est libre de circuler du Collecteur à l’Emetteur. (Interrupteur fermé)
Si VB > 0 ou VB > (VE + 0,7) : On dit que le transistor est bloqué, le courant ne peut pas circuler entre le Collecteur et l’Emetteur. (Interrupteur ouvert)
2) Résistances de base :
Avec :
- VCC : Tension d’alimentation de notre partie puissance (15 V)
- VCE : Tension entre l’émetteur et le collecteur du transistor ( 1,8 V)
- Rb : Résistance de base
- Isamp : Courant de sortie des amplificateurs (Partie commande)
Rb = (VCC – VCE) / Isamp = (15-1,8) / 0,015 = 880 Ω
Il est important de calculer la puissance que la résistance devra dissiper pour bien la dimensionner :
P = Rb x (Ib x Ib) = 880 x (0,015 x 0,015) = 0,198 W
La résistance choisie sera donc une résistance de 820 Ω – 0,5 Watt (pour des raisons de praticité)
Remarque : Le courant de sortie de nos AOP ne nous permettra pas de fournir 100 W, puisqu’on ne dispose pas d’assez de courant pour des Transistors 7A. Nous nous limitons donc à des transistors de 3A, mais avec 15V et 3A (maximum) nous n’aurons au maximum que 45 Watt.
3) Radiateur :
Nos transistors, tout comme nos résistances, dissipent une puissance, cette puissance mène à une importante augmentation de leur température. Pour palier à cette hausse de température il suffit d’ajouter des radiateurs :
Avec :
- Rtra : Résistance thermique radiateur – air
- Rtbr : Résistance thermique boitier – radiateur
- Rtjb : Résistance thermique jonction – boitier
- Δθ : Ecart de température
- P : Puissance dissipée
Rtra = (Rtjb + Rtbr) + Δθ / Q
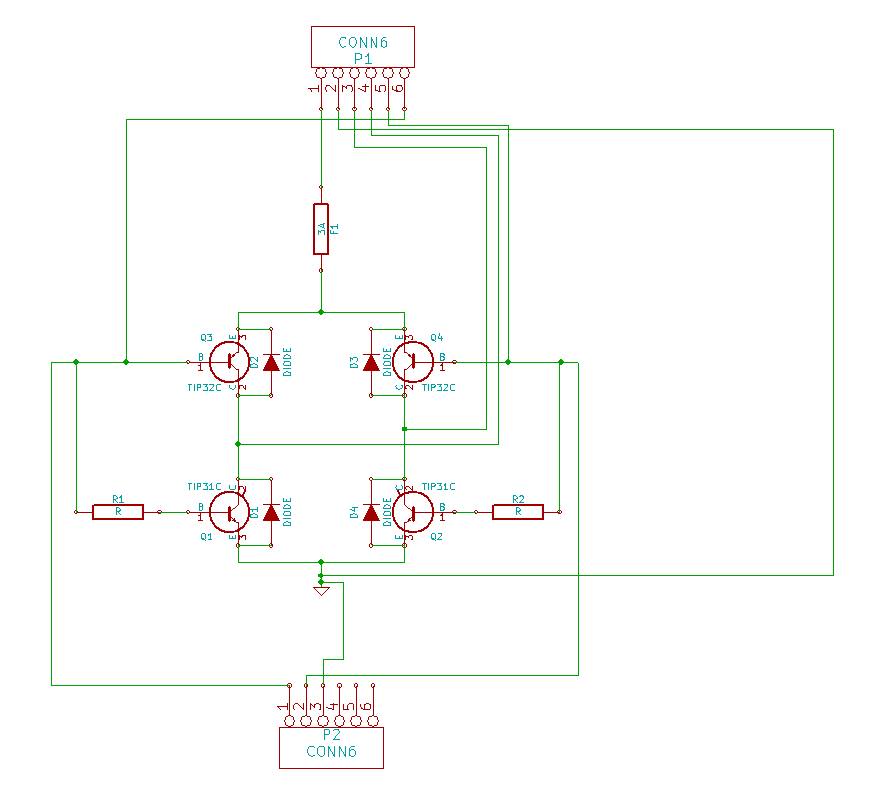
4) Fonctionnement de la partie puissance :
Notre montage est un montage pont en H, il n’est constitué que de 4 transistors, de 2 résistances et de 4 diode.
Les deux transistor sont alimenté par la MLI, or ils doivent commuter en opposition, les deux NPN ne doivent jamais être saturé en même temps. Un NPN est donc alimenté avec la MLI alors que l’autre est alimentée avec la complémentation de la MLI.
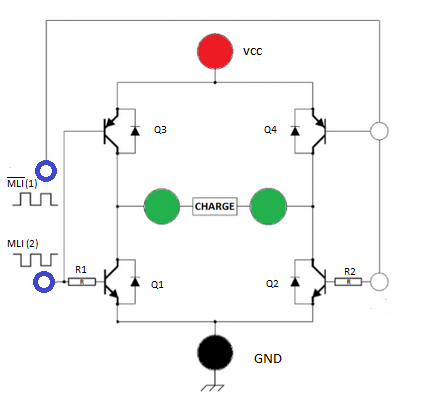
Avec :
- MLI (1) > 0
- MLI (2) = 0
==> Q1, Q4 bloqué
==> Q2, Q3 saturé
Le passage du courant est symbolisé par les flèches rouges : (Sens positif pour le courant)
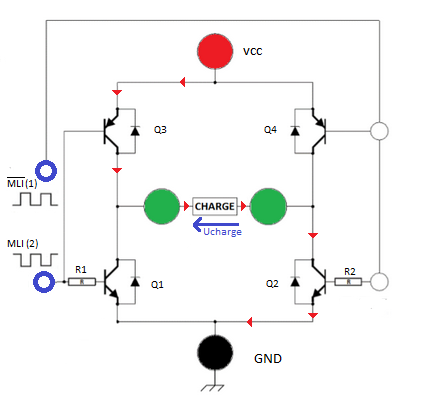
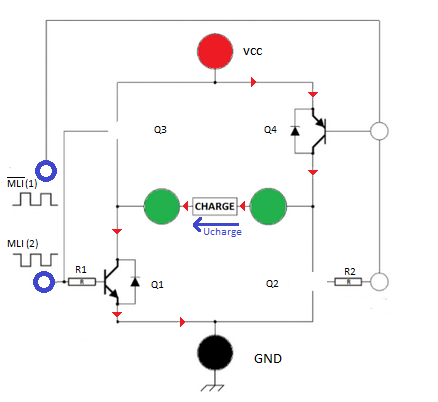
Vue de l’esprit ( Schéma simplifié) :
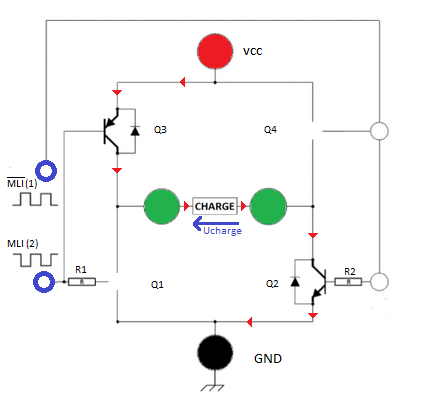
Avec :
- MLI (1) = 0
- MLI (2) > 0
==> Q2, Q3 bloqué
==> Q1, Q4 saturé
Le passage du courant est symbolisé par les flèches rouges : (Sens négatif pour le courant)
Vue de l’esprit ( Schéma simplifié) :
Q3 et Q2 se comportent comme des interrupteurs ouverts, Q4 et Q5 se comportent comme des interrupteurs fermés.
Remarque :
Avec ces schémas on comprend aisément qu’un pont en H permette de changer le sens de rotation d’un moteur.
5) Nos résultats :
La MLI ici en jaune est la MLI obtenue d’origine à l’aide de la partie commande, les signaux vert et rose sont les signaux qui commandent respectivement chaque transistor NPN, on observe bien que quand un signal est au niveau haut, l’autre est au niveau bas. On a donc bien une symétrie au niveau du fonctionnement de nos transistors.
Simulation (plaquette):
La simulation sur plaquette nous à permis de valider chacun des circuits en en testant cette fois-ci « en réel » le fonctionnement.
Étude financière (Achat des composants):
Après avoir réalisé les différents choix des composants on a réalisé une nomenclature des composants. Pour ainsi avoir une vue d’ensemble de tous les composants et matériels qu’on va utiliser. Bien évidemment on disposait déjà presque tous ces composants dans notre établissement. On a donc commandé les composants dont on ne disposait pas et réalisé cette nomenclature pour estimer le cout du projet. Voir ci-dessous.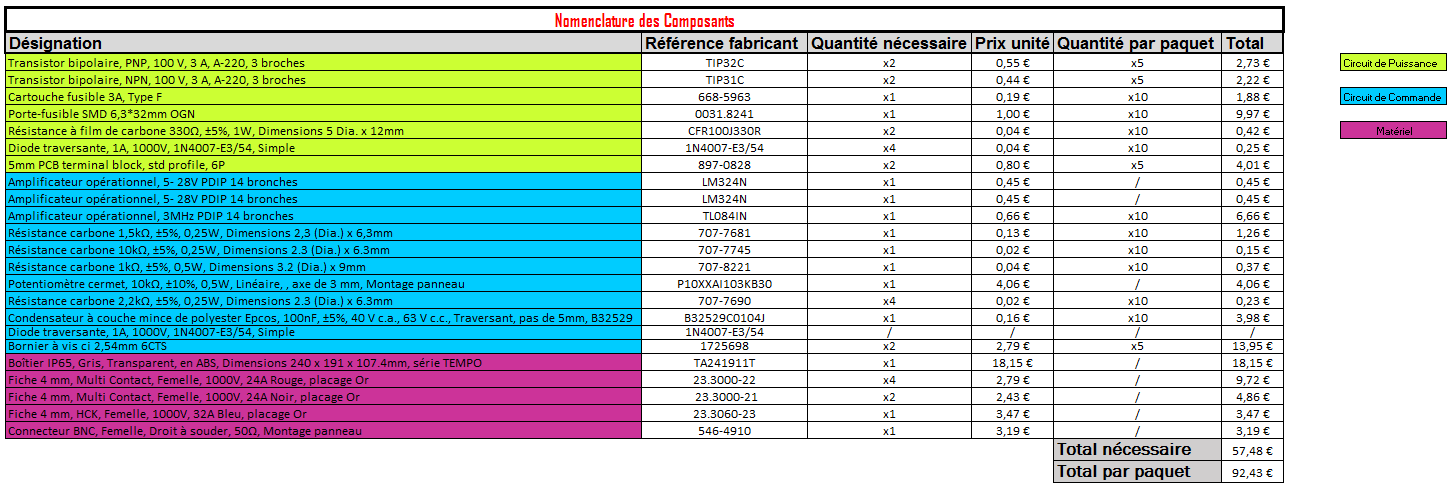
Avec un cout d’environ 60€ on est largement dans le budget (200€) !
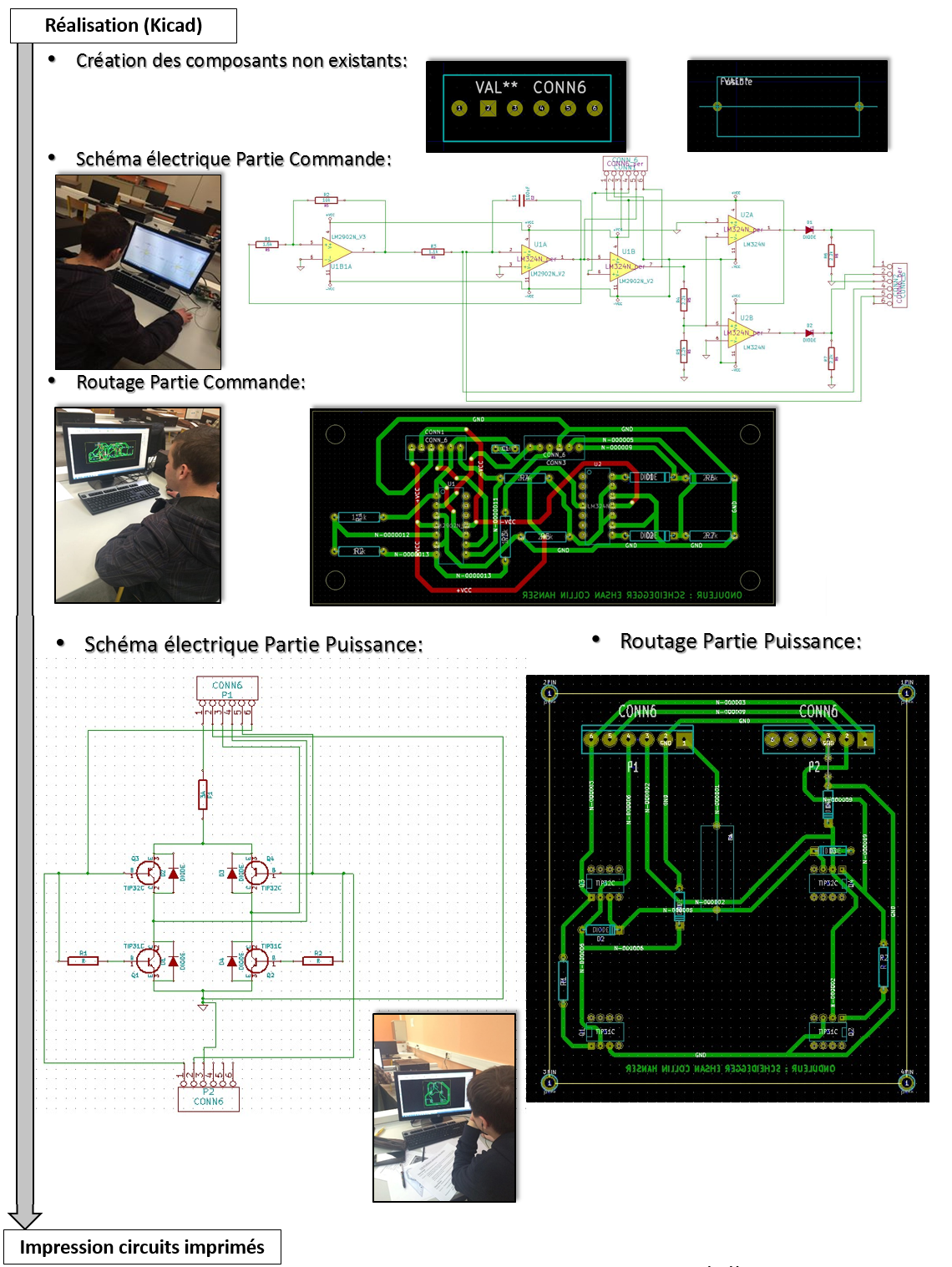
Réalisation (Kicad) :
Pour réaliser le routage des plaquettes de la partie commande et de la partie puissance, nous avons utilisé le logiciel Kicad. Nous avons utilisé ce logiciel lors du 1er Semestre donc nous nous étions dors et déjà familiarisé avec son fonctionnement ce qui nous a facilité la tâche.
Nous avons dû créer une partie des composants sur Kicad mais la plupart des composants étaient disponibles dans la librairie du logiciel.
Ainsi, nous avons pu router les deux plaquettes assez rapidement grâce, aux schémas de la partie puissance et de la partie commande que nous avions validés au préalable auprès de nos professeurs tuteurs, mais également en tenant compte du dimensionnement car nos 2 plaquettes vont constituer une maquette générale et celle-ci sera aux dimensions d’un boitier déjà en notre possession.
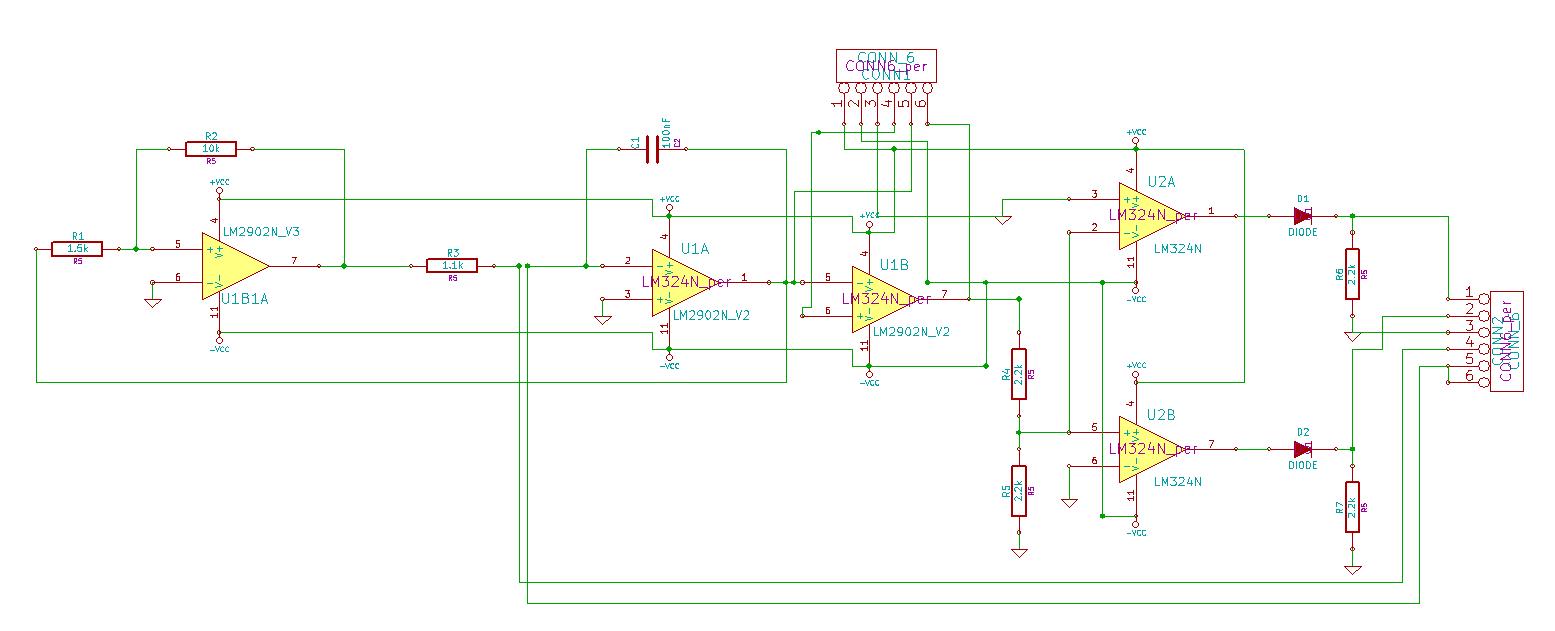
1) Partie commande :
1.1) EEschema
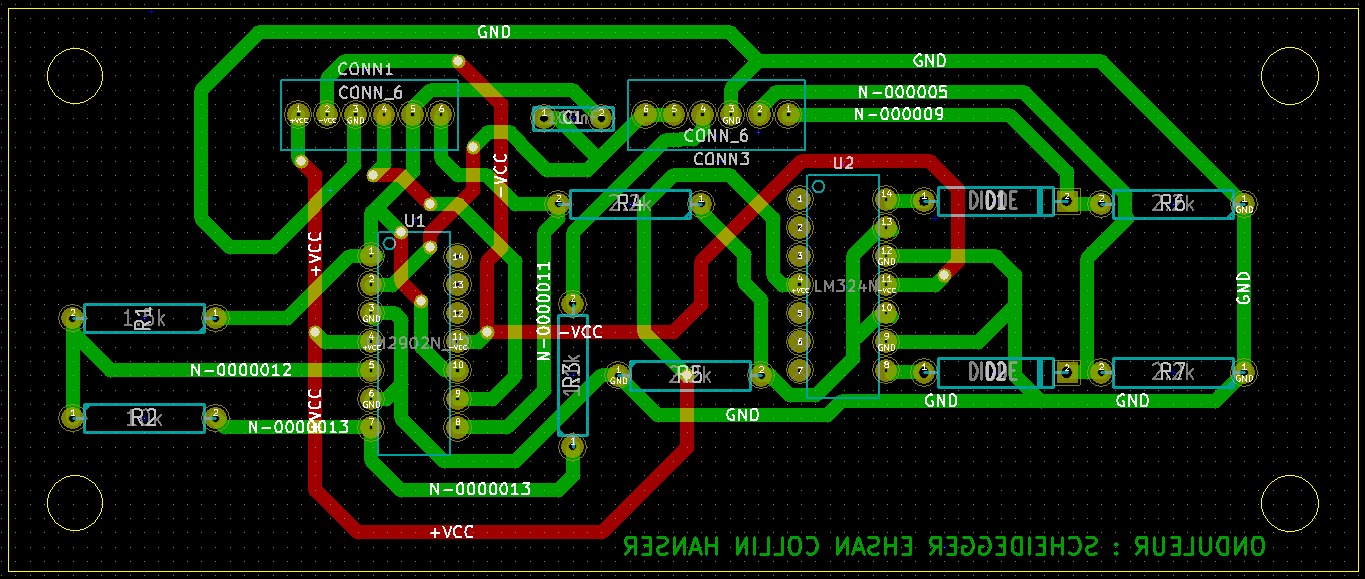
1.2) PCBNEW
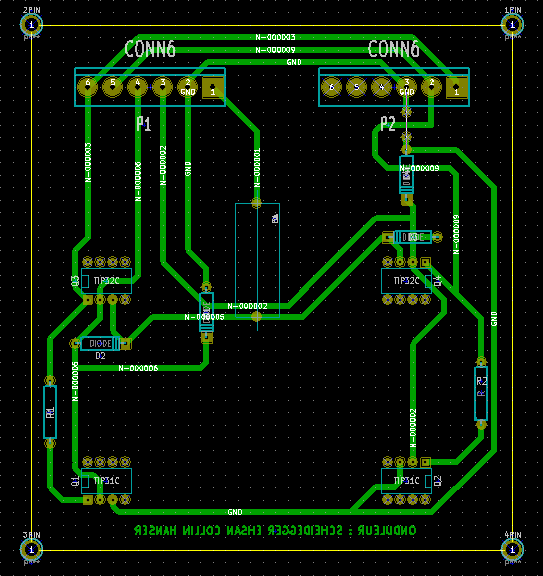
2) Partie puissance :
2.1) EEschema
2.2) PCBNEW
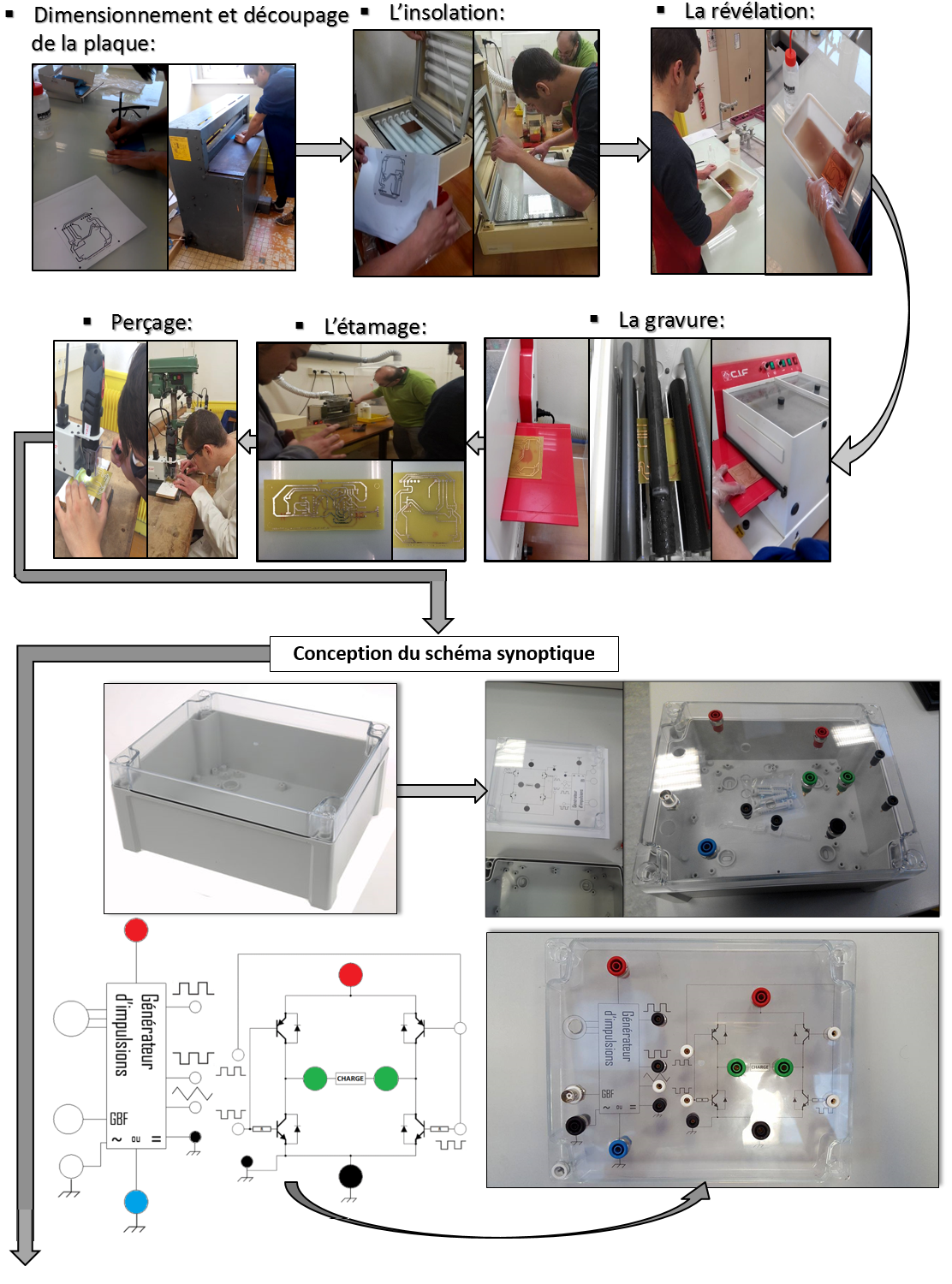
Impression circuits imprimés :
La fabrication du circuit imprimé consiste à graver les pistes (connexions entre composants électroniques) de cuivre sur une plaque.
Pour cela, on commence par imprimer sur une feuille le circuit réalisé sur Pcbnew (logiciel Kicad) :
Puis on suit les étapes suivantes :
1) L’insolation :
– Le feuille est soumise à des rayonnements ultra violet à l’aide d’une insoleuse. Seule la résine en dehors des pistes et pastilles est exposée au U. V. Après insolation, le dessin de la feuille apparaît sur la résine photo sensible .

2) La révélation :
– La carte est plongée dans l’acétone, quelques secondes suffisent pour dissoudre la résine exposée au U.V. et faire apparaître le cuivre indésirable.

3) La gravure :
– La carte est introduite dans une graveuse. Cette phase fait apparaître l’epoxy.

4) L’étamage :
– La carte est plongée dans une solution ionique à base d’étain (étamage à froid) qui se dépose sur le cuivre. (L’étameuse)
– Percer les trous des différents diamètres voulu.

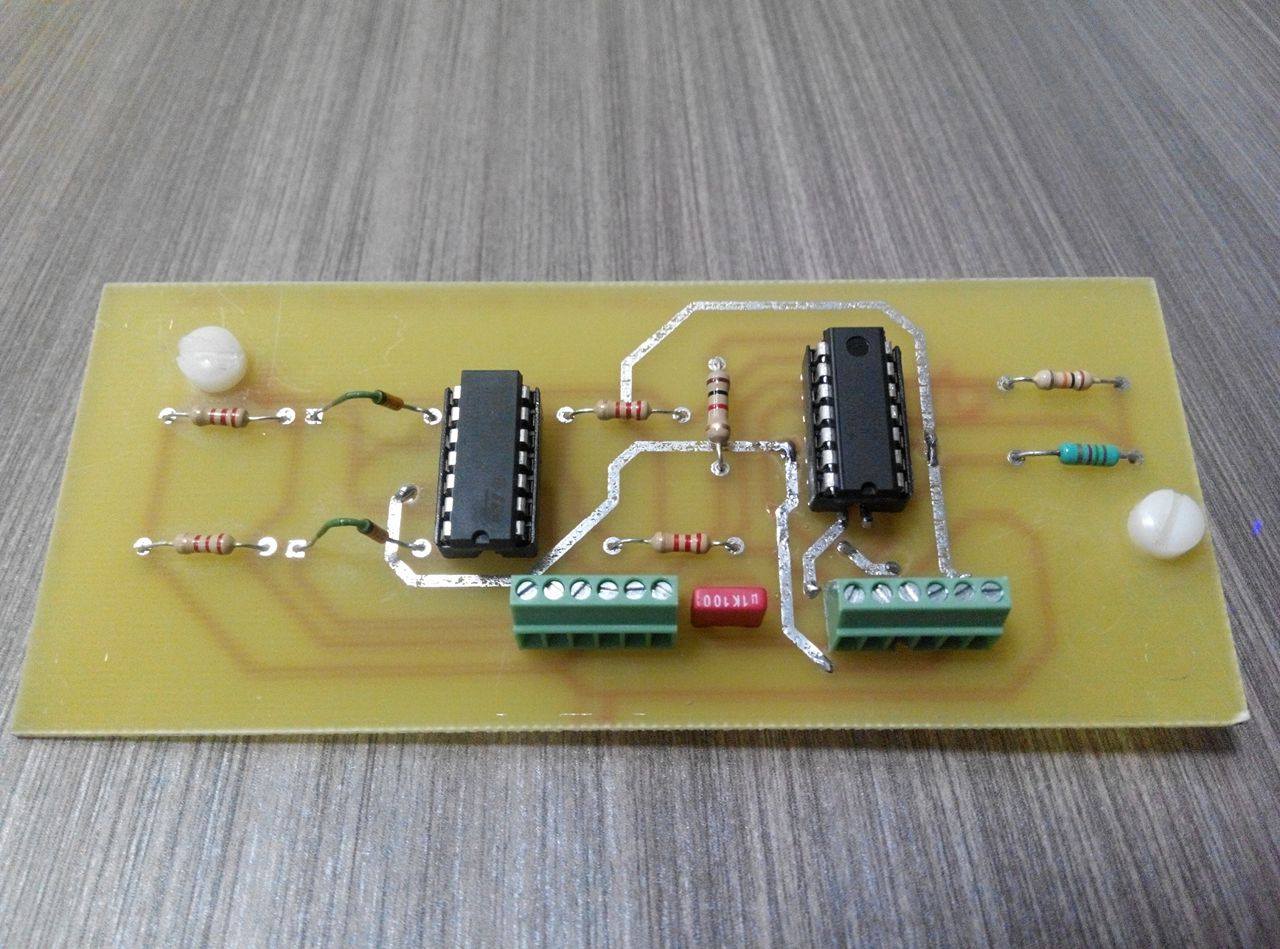
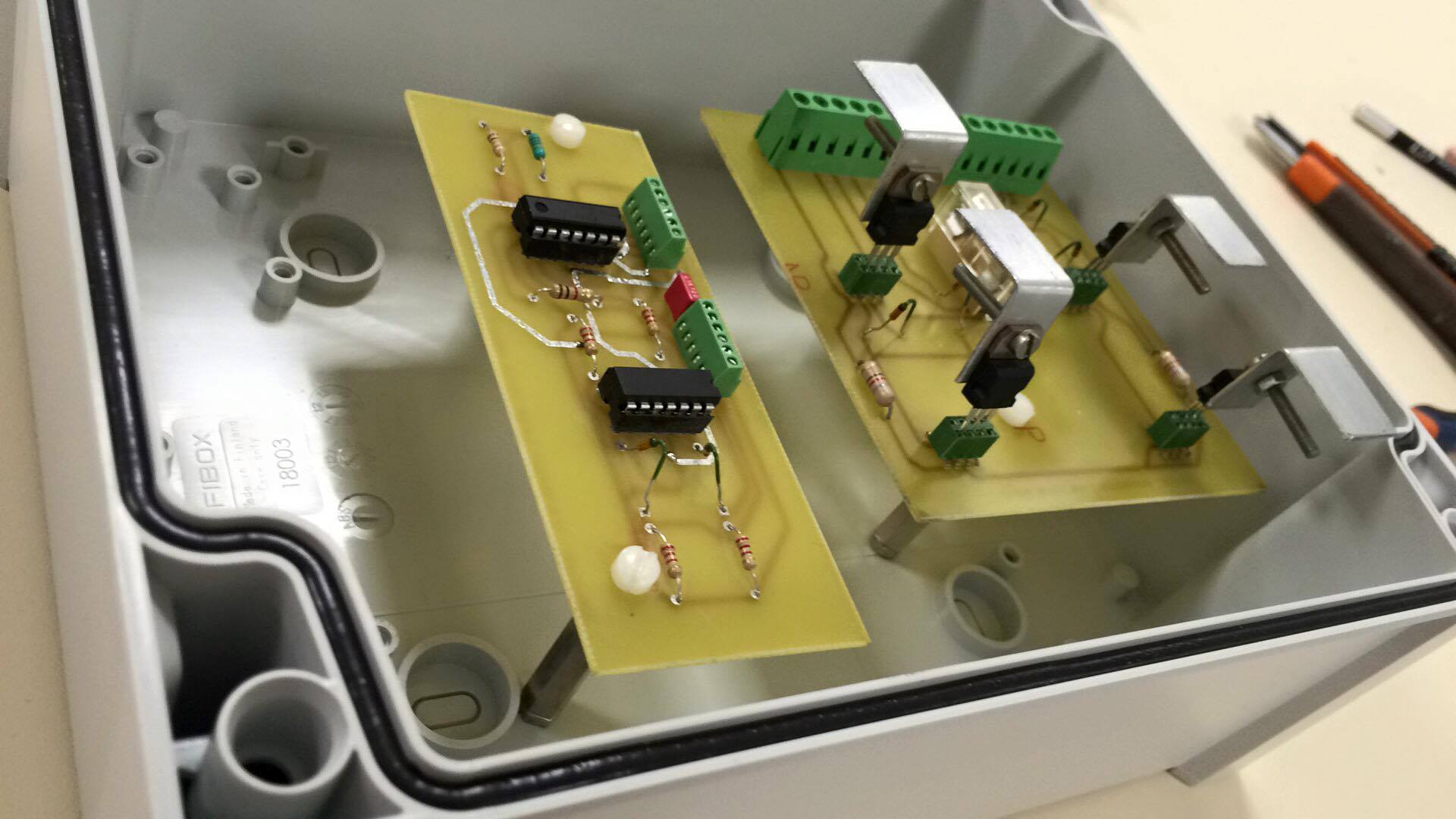
Nos circuits:
Une fois l’impression des circuits imprimés réalisée nous avons soudé les composants sur les circuits imprimés.
1) La commande :
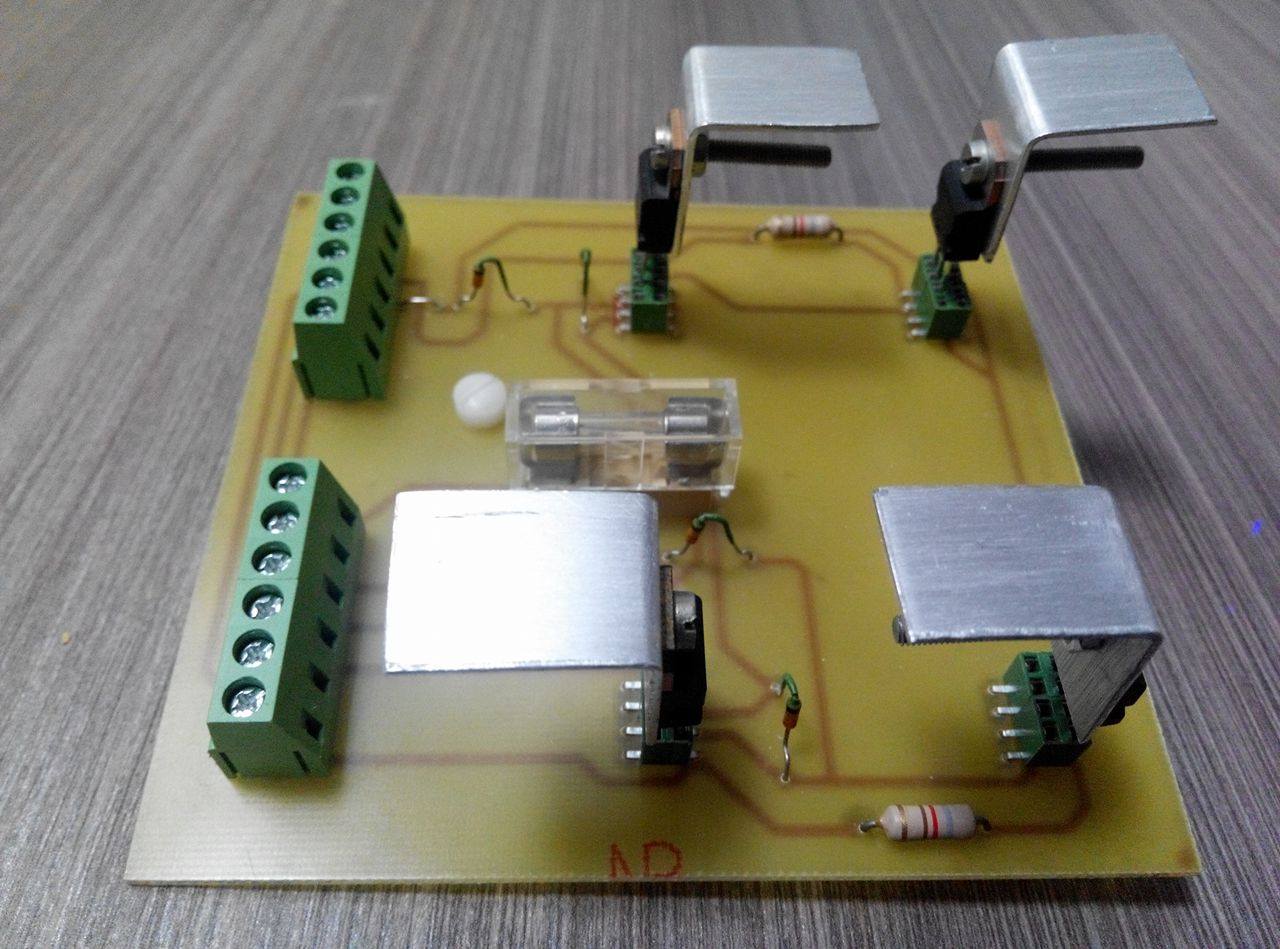
2) La puissance
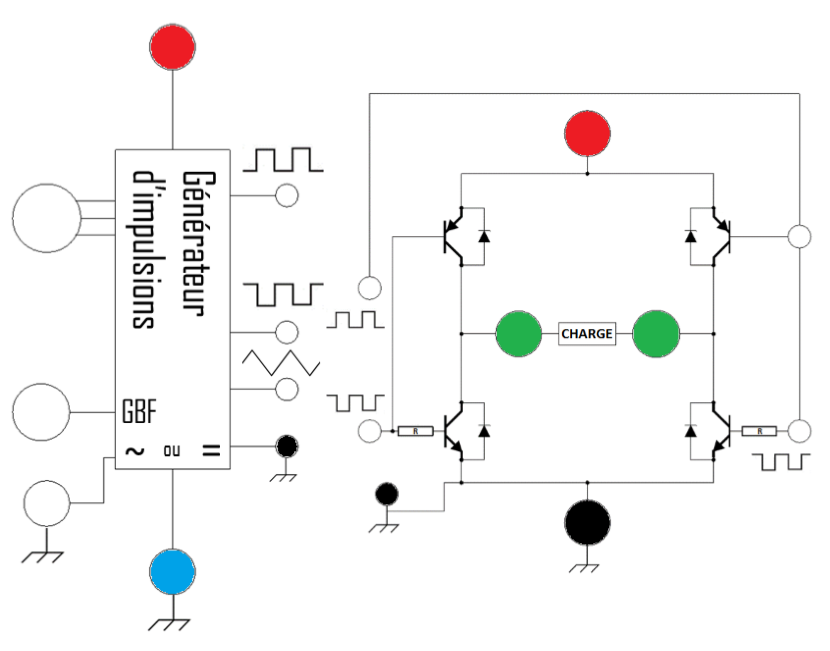
Conception du schéma synoptique :
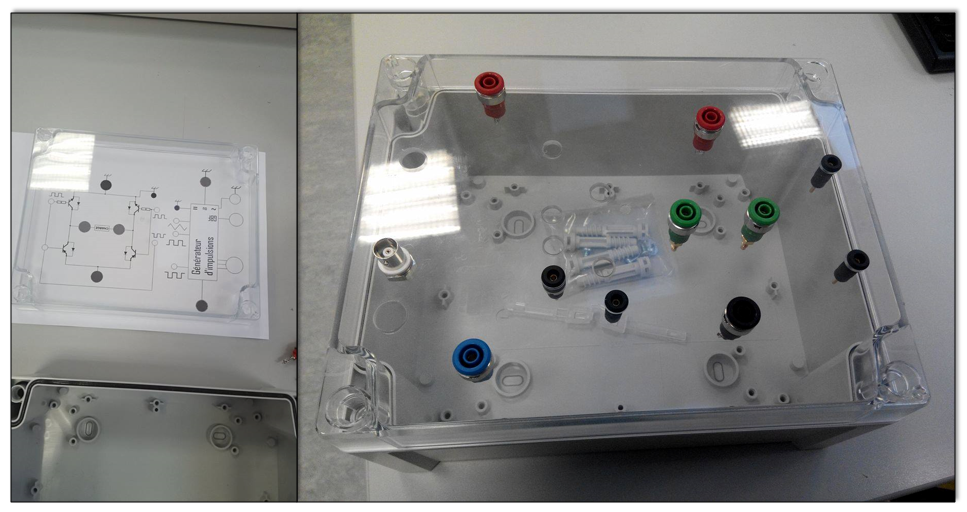 Le schéma synoptique est le schéma placé sur la façade de notre maquette Onduleur. S’agissant d’une maquette pédagogique, ce schéma synoptique a pour but d’indiquer à l’étudiant qui va travailler sur cette maquette comment elle fonctionne. Pour cela, seront indiquées sur le schéma synoptique les deux parties de la maquette : la partie commande et la partie puissance. Les connexions de sécurité (douilles) sont bien mises en valeurs par un code couleur pour guider l’étudiant lors du branchement des fils (masse, charge). Seront également indiqués les connexions où les différents signaux pourront être visualisé (signal carré, signal triangle).
Le schéma synoptique est le schéma placé sur la façade de notre maquette Onduleur. S’agissant d’une maquette pédagogique, ce schéma synoptique a pour but d’indiquer à l’étudiant qui va travailler sur cette maquette comment elle fonctionne. Pour cela, seront indiquées sur le schéma synoptique les deux parties de la maquette : la partie commande et la partie puissance. Les connexions de sécurité (douilles) sont bien mises en valeurs par un code couleur pour guider l’étudiant lors du branchement des fils (masse, charge). Seront également indiqués les connexions où les différents signaux pourront être visualisé (signal carré, signal triangle).
Pour dessiner le schéma synoptique, nous nous sommes basés sur les schémas des parties commande et puissance réalisés sur le logiciel KICAD , nous avons utilisé plusieurs logiciels tels que Powerpoint, Word voir même Paint.
Voici le résultat :
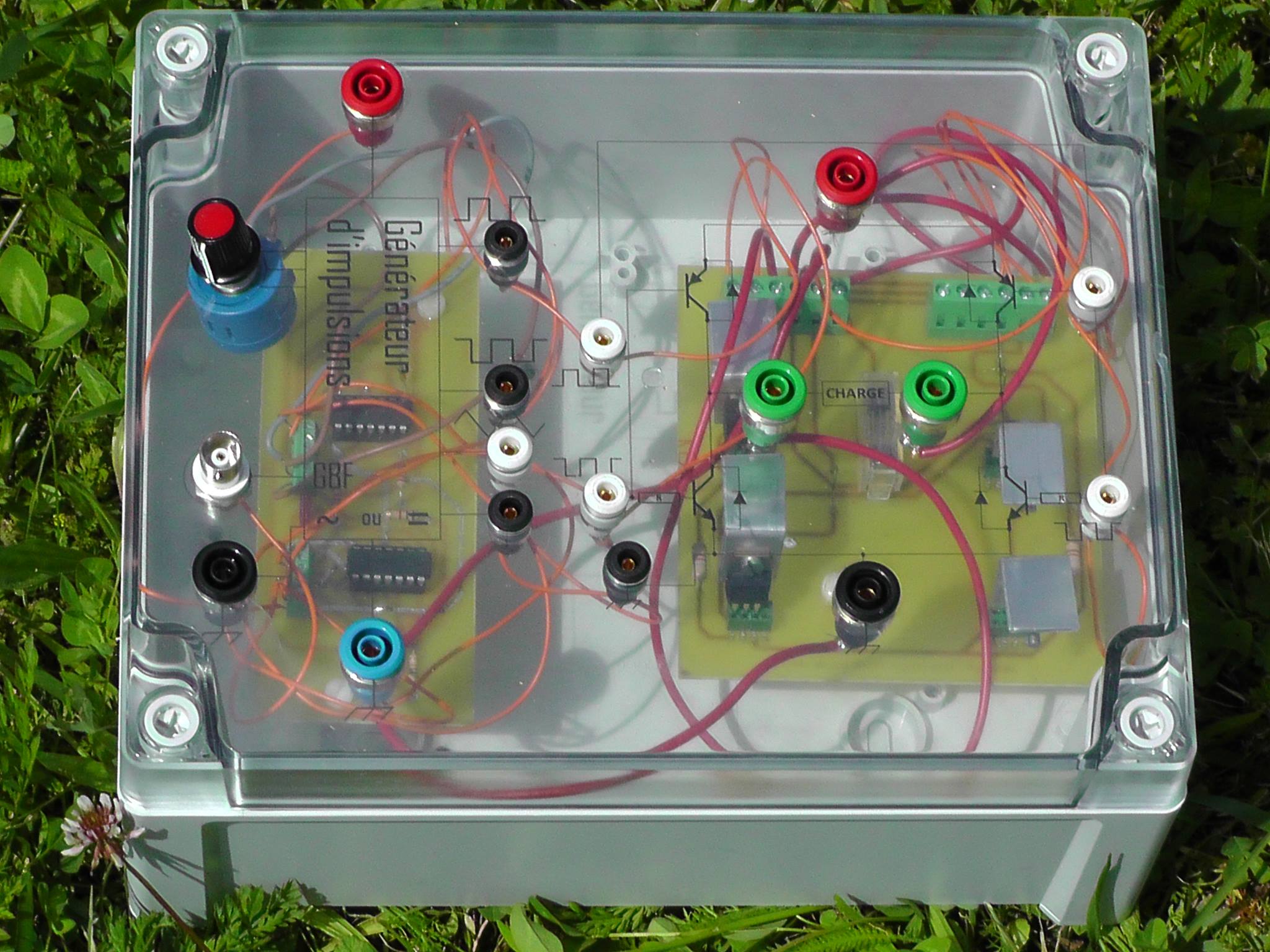
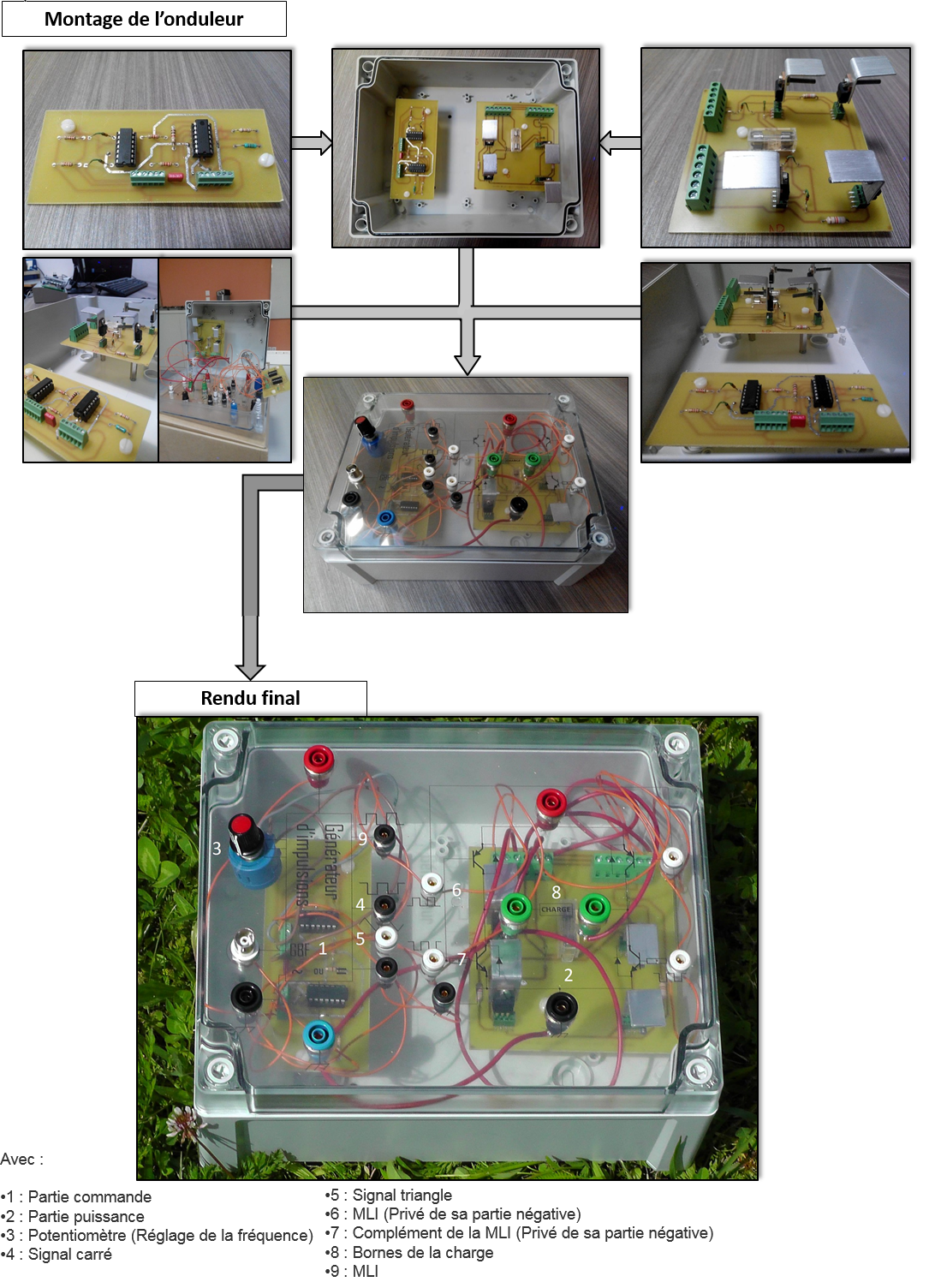
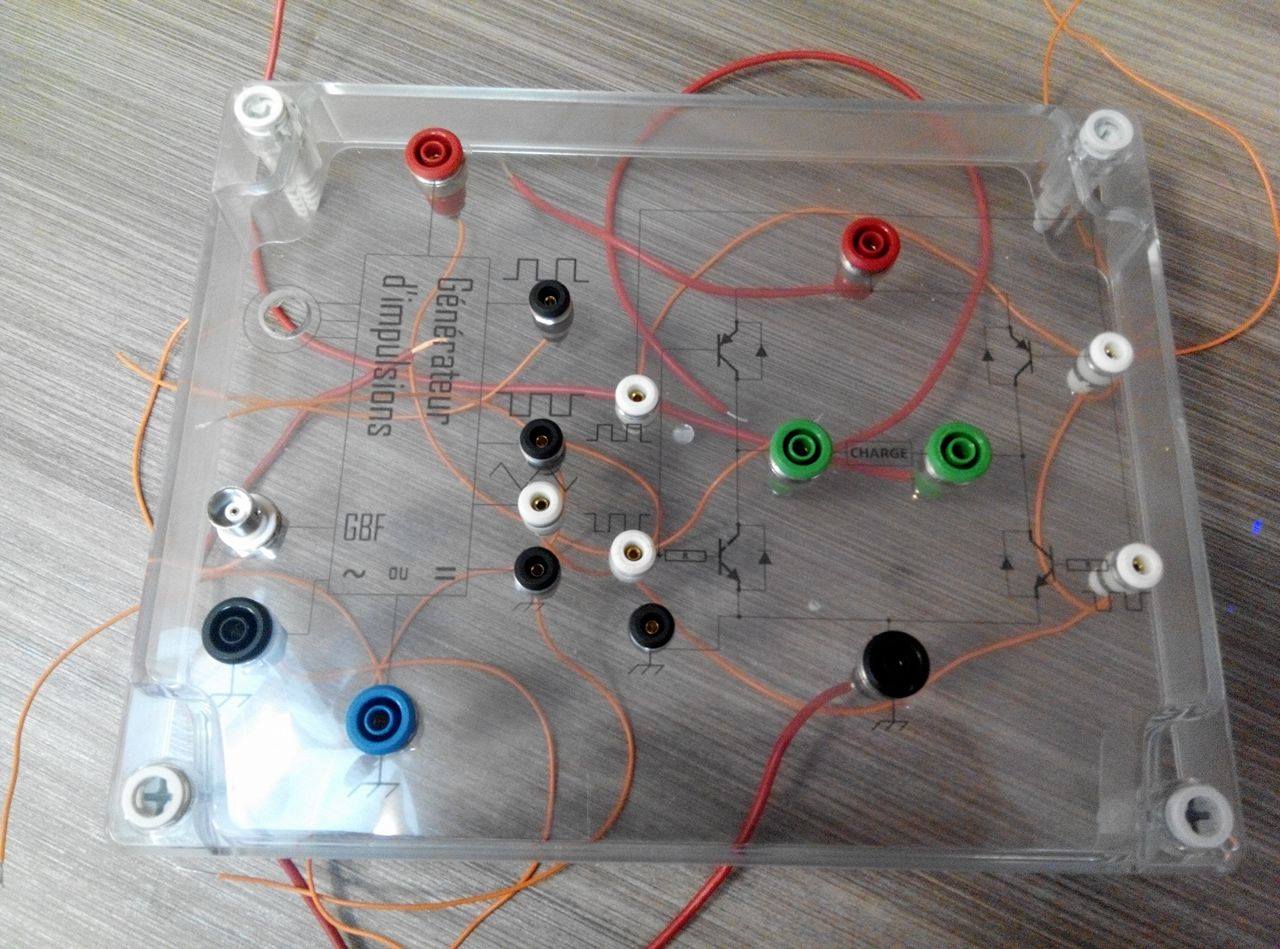
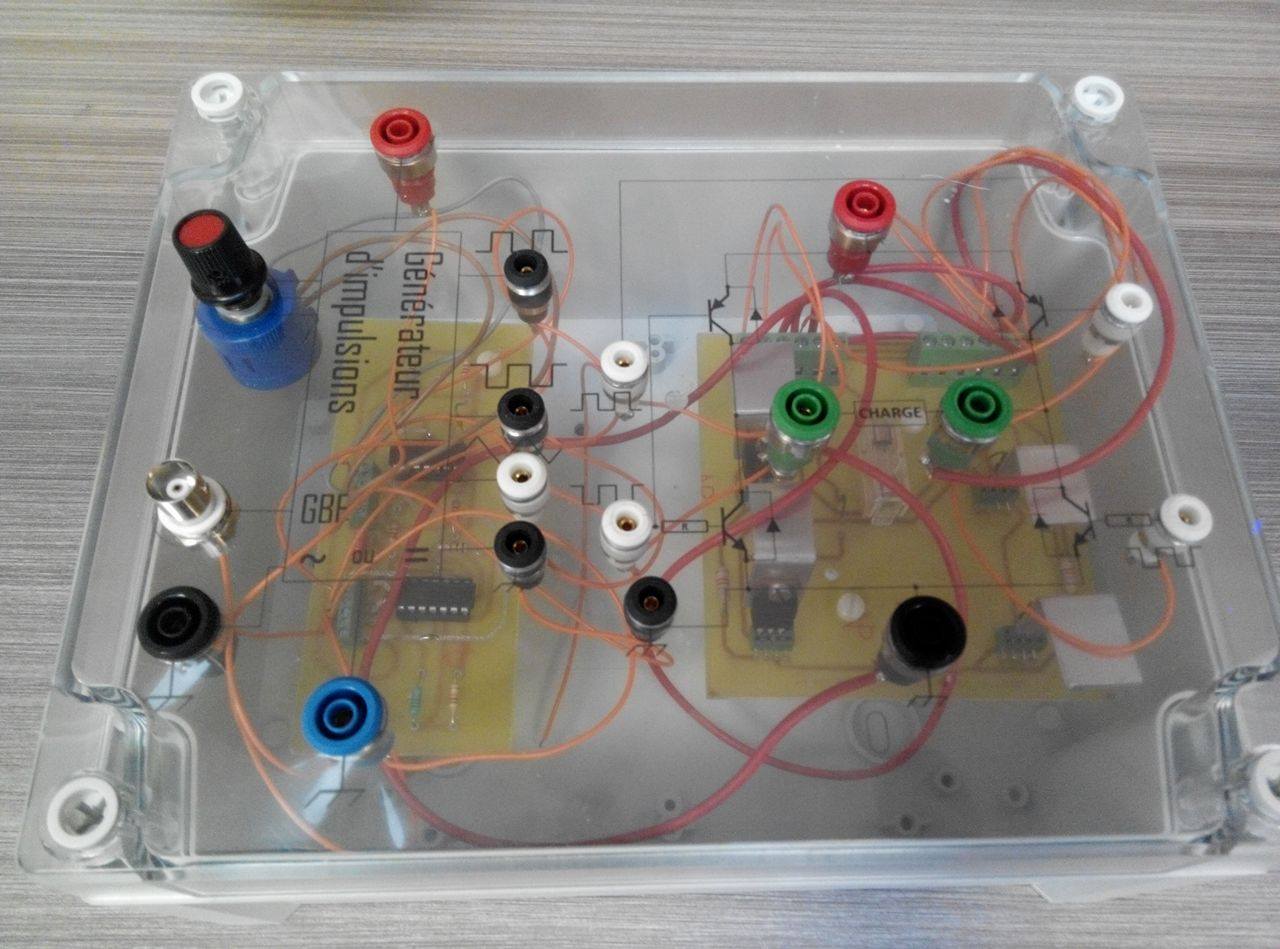
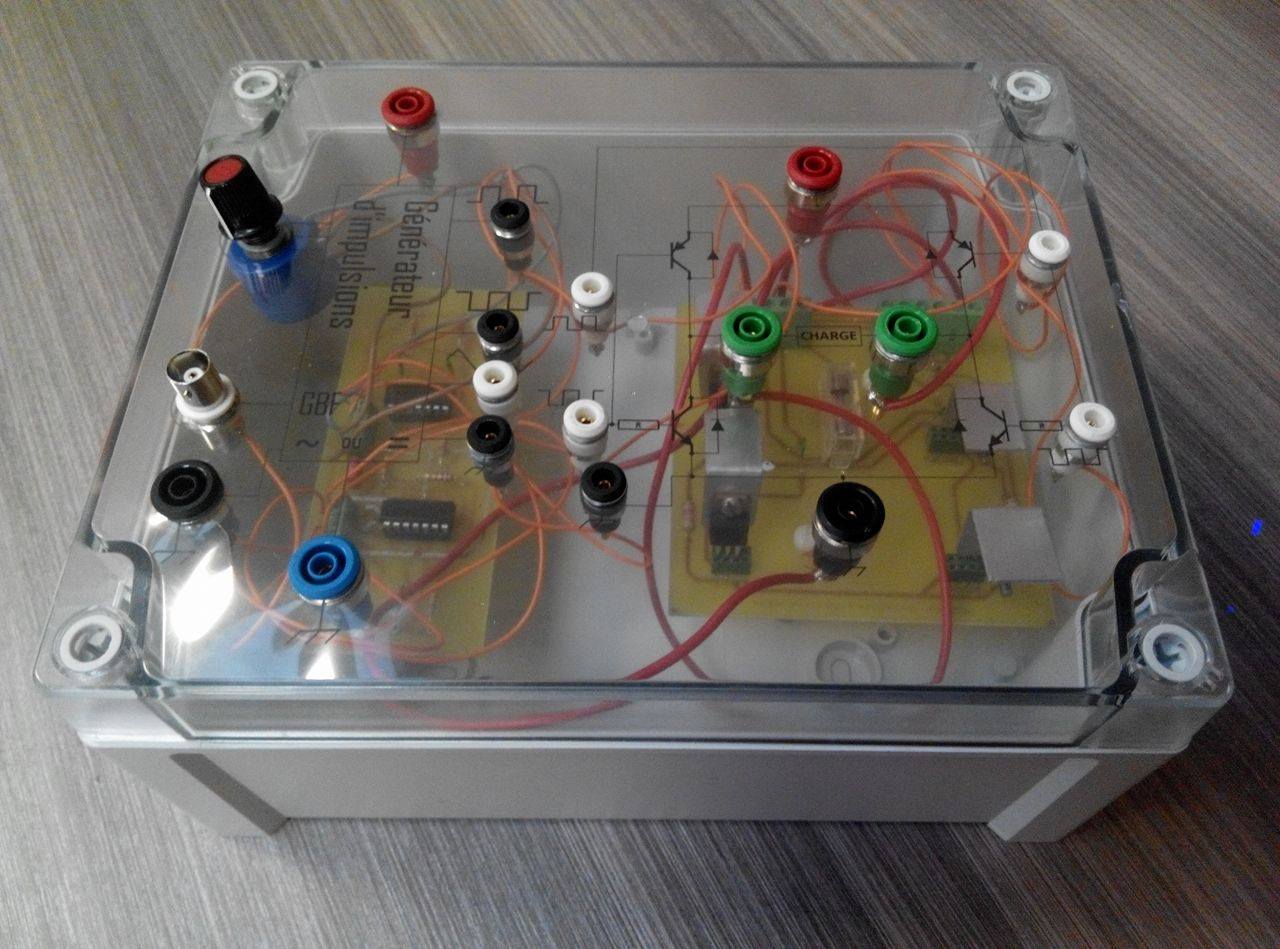
Montage de l’onduleur :
1) Pose du synoptique sur le boitier et ajout des douilles :

2) Fixation de nos circuits sur le boitier :
3) Câblage :
4) Assemblage :
Réalisation du dossier :
Nous avons tout au long du projet réalisé des comptes rendu afin de suivre précisément son avancement, mais aussi une présentation Powerpoint ( qui sera utilisé pour la soutenance) et pour finir un site internet qui nous permettra de laisser une trace de notre travail ainsi qu’un mode d’emploi et enfin de partager l’expérience qu’a été notre projet.
Bilan :
1) Exemples d’application de l’onduleur sur un moteur :
- Hacheur 4 quadrants / Onduleur
- Variation de vitesse du moteur
Ces deux exemples d’application illustrent le fonctionnement de nos circuit et font office de validation des prototypes.
Les plaquettes de la partie puissance et commande fonctionnent, le schéma synoptique est réalisé et validé par les professeurs tuteurs, le perçage des trous sur le boitier sont faits, il ne reste plus qu’à assembler tout cela et réaliser des tests afin de finaliser notre maquette Onduleur.
2) Schéma BILAN :

Avec :
- 1 : Partie commande
- 2 : Partie puissance
- 3 : Potentiomètre (Réglage de la fréquence)
- 4 : Signal carré
- 5 : Signal triangle
- 6 : MLI (Privé de sa partie négative)
- 7 : Complément de la MLI (Privé de sa partie négative)
- 8 : Bornes de la charge
- 9 : MLI
Mode d’emploi :
Notre maquette est destinée à des étudiants, elle doit donc être simple d’utilisation. L’utilisateur doit être guidé avant de manipuler cette maquette, d’où la nécessité de décrire ses conditions d’utilisations :
1) Alimentation du boitier :
- Les douilles rouges doivent être connectées à une alimentation continue de 15 V maximum
- La douille bleu doit être connectée à une alimentation continue de – 15 V maximum
- Les douilles noires (Plus gros diamètre) doivent être connectées à la masse de l’alimentation
2) Points de mesure :
Comme indiqué sur le synoptiques les mesures possibles sont :
- Signal triangulaire
- Signal carré
- MLI (D’origine)
- MLI (Privé de sa partie négative)
- Complément de la MLI (Privé de sa partie négative)
- Signal sur la base d’un NPN
- Signal sur la base d’un PNP
3) Fonctionnement :
- Si le GBF envoi une tension continue, HACHEUR 4 QUADRANTS
- Si le GBF envoi une sinusoïde, ONDULEUR
Conclusion :
Après près de 4 semaines de projet à, travailler en groupe, être autonome dans notre gestion du temps et du travail, faire face aux imprévus et aux difficultés, créer une maquette pédagogique de A à Z, nous avons appris beaucoup de notions sur le travail en groupe et sur la conduite d’un projet.
Ce projet nous a permis de faire l’expérience de ce qui nous attend dans le monde professionnel dans lequel à partir d’un cahier des charges donné, il va falloir définir les tâches de chacun des membres du groupe sans oublier de gérer le temps afin de finir le projet sans retard. Pour cela, nous avons utilisé ce que nous avons appris tout au long des modules de Conduite de Projet du Semestre 1 et du Semestre 2. Nous avons également utilisé nos connaissances scientifiques du module Énergie du Semestre 1 tout en s’imprégnant du module d’Électrotechnique du S2 afin de pouvoir comprendre l’utilisation de notre maquette onduleur que l’on utilisera lors des TP du Semestre 3.
La répartition des tâches dès la 1ère semaine de projet nous a permis d’anticiper les éventuels imprévus et de mieux gérer notre temps de travail. Ainsi, nous avons rencontré que peu de problèmes lors de notre progression et nous n’avons donc pas pris de retard sur l’avancement du projet, nous avons même pris de l’avance par rapport à notre projection prévisionnel.
Même s’il reste encore quelques tâches à réaliser afin de finaliser notre projet, nous sommes en bonne voie et sommes assez satisfait du résultat de notre travail que l’on peut qualifié de succès. L’aide et les conseils apportés par nos professeurs tuteurs nous ont été très précieux et cela nous a permis d’avancer avec confiance tout au long de ces 4 semaines de projet.
Les soutenances de projet se sont également bien passées et nous appréhendons avec confiance la soutenance finale qui aura lieu fin Juin en sachant que nous devront épurer et affiner notre présentation afin de présenter quelque chose de concis et efficace, ce qui sera attendu.
Remerciements :
Un grand merci à M. STRAFELLA et M.COLICCHIO, nos enseignants-chercheurs tuteurs pour ce projet, de nous avoir aidé pour ce projet.
Merci au département GEII de l’IUT de Mulhouse pour le prêt du matériel nécessaire et pour l’achat des composants et du boîtier.
Sources :
- https://fr.wikipedia.org/wiki/Modulation_de_largeur_d%27impulsion
- https://fr.wikipedia.org/wiki/Amplificateur_op%C3%A9rationnel
- http://for-ge.blogspot.fr/2015/08/londuleur.html
- http://electronique.aop.free.fr/AOP_sature/10_triangle.html