Sommaire
Introduction
Etudiants de première année en département GEII à l’I.U.T de Mulhouse, nous avons eu la chance de pouvoir choisir entre différents sujets de projets proposés par les enseignants. Une fois les groupes réalisés, nous pouvions commencer à travailler sur un projet avec une grande liberté tout en aillant accès à l’aide des enseignants si besoin. Pendant 4 semaines, le but était à la fois de gérer la conduite du projet, l’étude et la réalisation de celui-ci.
Présentation du Sujet
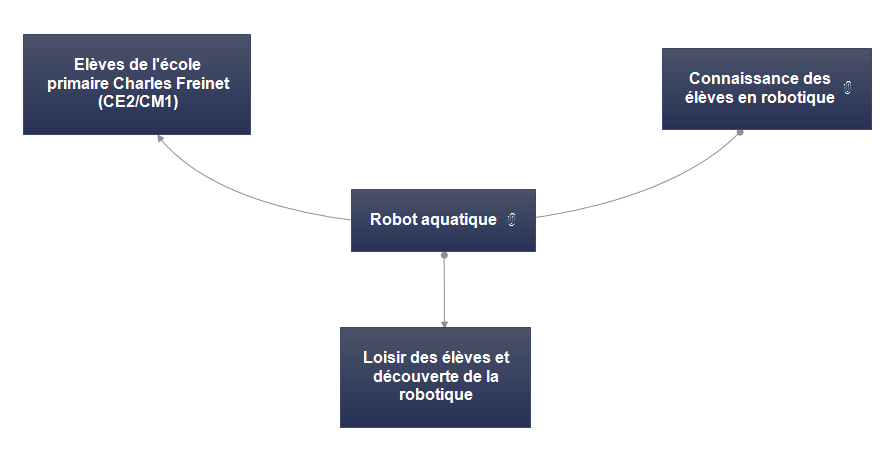
Nous avons lancé le projet par une visite à l’école Freinet de Mulhouse. L’objectif était de faire découvrir aux enfants la robotique. Les enfants étaient prévenus de notre visite et avaient pour mission de nous dessiner le robot de leur rêve sur le thème de notre projet : « Robot Aquatique ». Nous sommes donc venus récupérer les dessins afin de nous donner une idée des robots que nous allions devoir réaliser.
Ce que nous avons retenu :
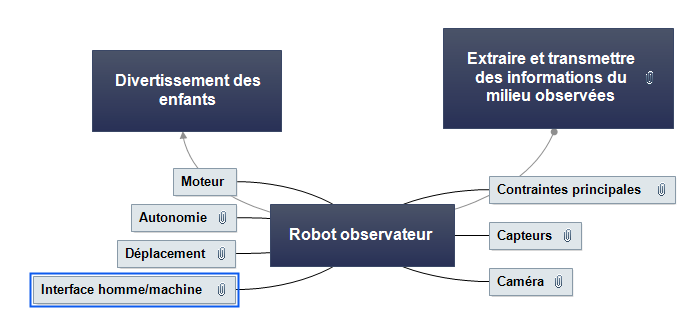
- Faire un robot « observateur » capable de se déplacer de façon autonome et de filmer les environs.
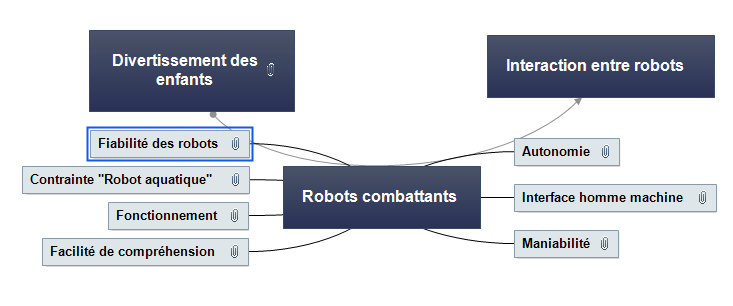
- Faire 2 robots « combattants » capables de tirer de l’eau l’un sur l’autre et créer un jeu autour de cela. Ces robots sont quant à eux commandés par des manettes, afin de laisser les enfants jouer avec.
Nous avons aussi pu leur faire construire des robots Lego, ainsi que leur montrer ce qu’était dans les grandes lignes la programmation sur ordinateur.
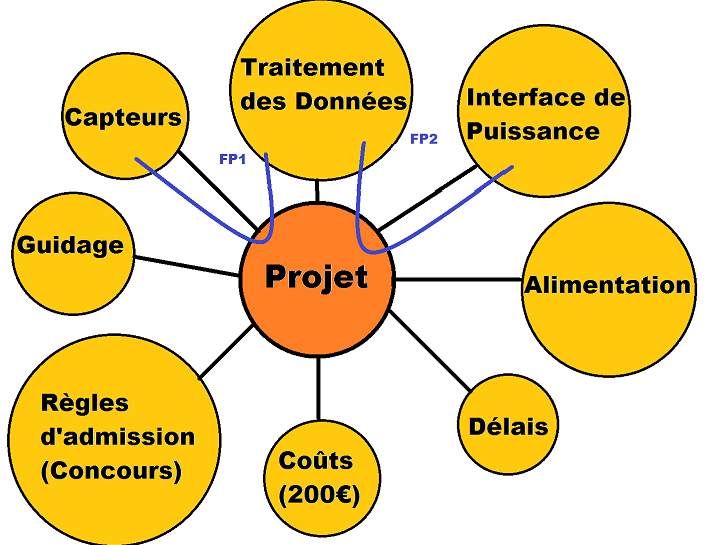
Cahier des Charges
Cadre du projet :
Contexte :
- Collaboration avec les enfants de l’école Freinet afin de construire des robots qui répondent dans la mesure du possible aux attentes des élèves.
- Des recherches ont été effectuées pour le choix des composants et sur la manière de construire les robots. Des tests de flottabilités ont également été effectués sur la coque confectionnée par les membres du groupe.
Acteurs :
- Les enfants dans la recherche d’idées
- Notre groupe de projet, soit : SEDIRI Aladin, FOUCAULT Antoine, LAVALLEE Arthur, DEVERCHIN Arnaud, DECKER-WURTZ Alexis, BERTRAND Christopher et GAECHTER Hugo dans les changements à apporter aux idées pour les rendre réalisables et les réaliser
- Mr HUEBER et CHOISY en tant que profs référents
Besoins :
- Connaissances techniques à acquérir dans la construction physique et la programmation des robots
- Construire des robots fonctionnels tout en répondant aux attentes des enfants
- Respecter les contraintes de sécurité, et celles imposées de coûts et de délais
But :
- Ce projet à pour but de promouvoir le département GEII aux journées portes ouvertes, ainsi que de sensibiliser les enfants de l’école à la robotique. Il est important de montré que la robotique est une discipline qui nous intéresse et nous intrigue, c’est pourquoi ce projet est très apprécié car il nous permet de mettre en pratique tout ce qu’on connait de ce domaine, d’apprendre de nouvelles choses, tout en renvoyant pour le GEII l’image d’être un département qui innove dans ses méthodes d’apprentissage.
Contraintes :
Budget :
200e imposés, extensible si besoin en appelant l’aide d’autres groupes qui n’ont pas besoin de tout utiliser
Délais :
- Première date butoir à la JPO (1 robot fonctionnel en partie au moins nécessaire)
- Date à laquelle les enfants viennent, où tous les robots doivent être fonctionnels, testés et approuvés (date en attente)
- Date de fin de projet à laquelle tout doit être fini et présentable (26 Juin)
Sécurité :
Celle des robots et des enfants, s’assurer de l’étanchéité des robots et empêcher des fuites de courant dans l’eau.
Les normes officielles de sécurité des enfants sont à la charge de l’école.
Aucune norme officielle ne nous concernent dans la construction de nos robots, on ne trouve que des normes concernant des robots industriels ce qui n’est pas notre cas.
Taille du groupe :
Nous sommes 7 à travailler ensembles sur le même projet, ce qui exige une organisation et répartition des tâches irréprochables pour ne pas rendre certains travaux infructueux. On se sert donc de Google Drive pour avoir un tableau des tâches que chacun doit faire et pour quand. Chacun peut écrire sur ce fichier pour rendre compte de l’avancement de ses travaux et ainsi éviter des mésententes au sein du groupe.
Objectifs du projet :
Faire découvrir aux enfants les possibilités mais aussi les limites de la robotique, tout en rendant le projet fun à découvrir à travers le contrôle des robots et d’un jeu.
Ressources matérielles :
- Coque (Polyester)
- Hélices
- Gouvernail
- Moteurs
- Cartes Arduino + Manette ou smartphone (Interface H/M)
- Piscine
Ressources Humaines :
- Membres de notre groupe
- Les enfants (clients)
- Profs référents (Mr HUEBER et CHOISY)
- Autres groupes de projet pour bénéficier d’extensions de budget
Graphiques :
Générale :


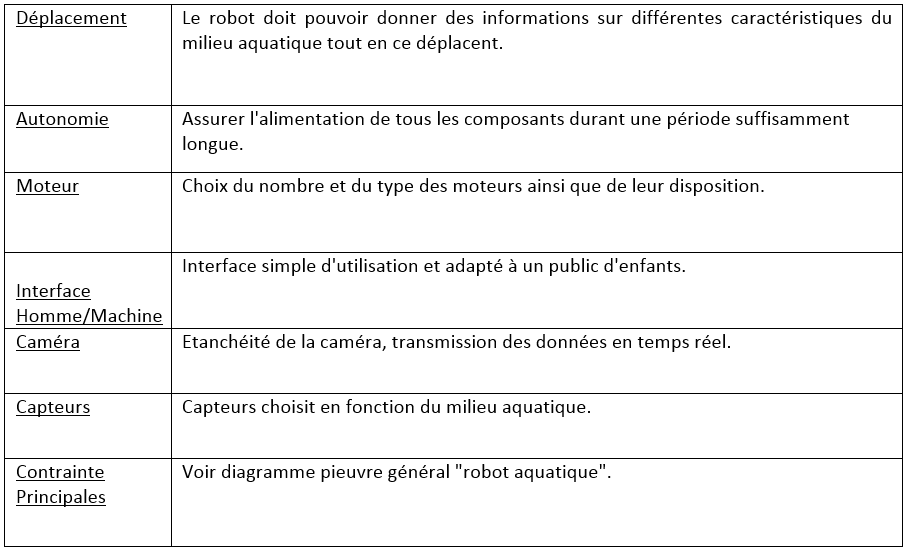
Robot observateur :
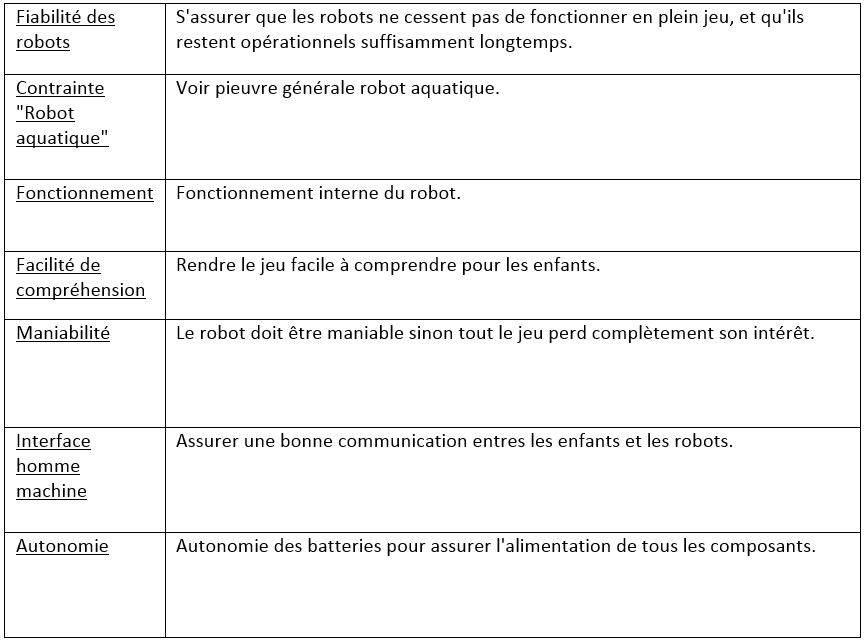
Robots combattants :
GANTT :
Prévisionnel :

Réel :

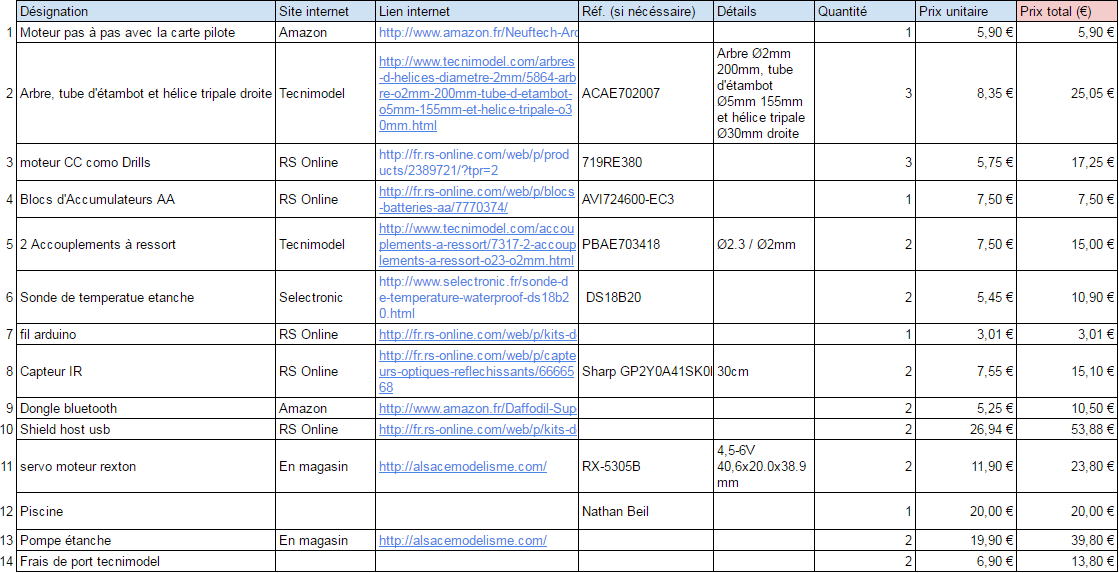
Budget détaillé
Liens :
1
2
3
4
5
6
7
8
9
10
11 et 13
Budget alloué : 200 €
Dépenses : 261,49 €
Développement
Alimentation
Nous avons 2 moteurs sur le robot observateur :
- Un pour avancer/reculer (Moteur courant continu) et le second pour tourner (Servomoteur)
Et 3 moteurs sur les robots combattants :
- Un pour avancer/reculer (Moteur courant continu) et le second pour tourner (Servomoteur) et la pompe
Le problème rencontré dans les 2 cas était qu’une seule batterie ne suffisait pas, car lorsqu’on fait tourner tout les moteurs d’un bateau, la chute de tension provoquée était trop importante et faisait planter l’arduino.
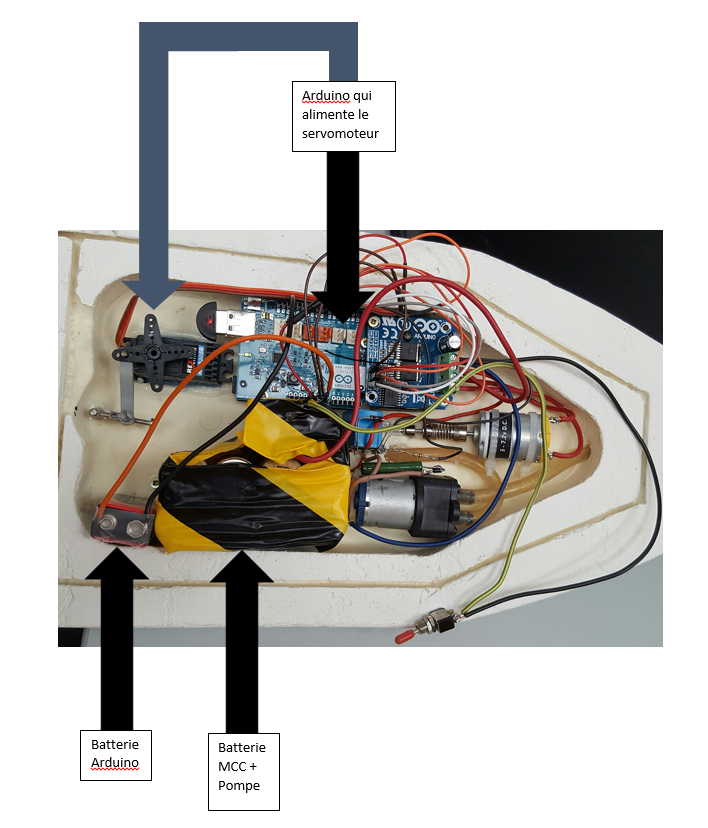
Notre solution a été de mettre 2 batteries sur les bateaux :
- Une de 9V pour alimenter l’arduino, arduino qui servira ensuite à alimenter le servomoteur
- Une de 12V pour les autres moteurs (MCC pour l’observateur, MCC et pompe pour les combattants)
Manette
Nous voulions au départ récupérer une manette déjà existante, type voiture commandée, afin de récupérer le récepteur, le mettre sur notre bateau plutôt que sur la voiture et réutiliser ainsi un fonctionnement déjà créer et simplement l’adapter à notre besoin.
Seulement, les manettes récupérées ne marchaient pas bien, beaucoup de composants étaient manquants, nous avons rencontré énormément de problème en voulant opter pour cette solution et ils auraient étés trop longs à résoudre. De plus, nous n’aurions en rien créer la communication, et le but de ce projet n’est pas de récupérer mais de créer.
Finalement, nous avons donc rajouter un shield USB sur l’arduino et un donggle bluetooth associé à une manette de PS3, ce qui nous a fait programmer : Programmation Commande Bateau
Donggle
Nous pensions avoir un problème puisque le donggle bluetooth utilisé ne fonctionnait pas, mais c’était finalement simplement un composant dessoudé, nous l’avons donc simplement ressoudé.
Servomoteur
Nous voulions récupérer pour les 3 bateaux 3x les mêmes servomoteurs récupérables à l’I.U.T, mais pour les robots combattants nous avons rencontré un problème de conflit avec la manette. En effet, soit le programme du servomoteur prenait de le dessus et fonctionnait à l’instar de celui de la manette, soit l’inverse, le programme de la manette fonctionne mais pas celui du servomoteur.
On a finalement du en prendre 2 nouveaux pour les robots combattants afin de régler ce problème.
Cela a entraîné un nouveau problème : Comment programmer ces nouveaux servomoteurs, et où trouver les drivers, étant donné qu’ils ne sont pas faits pour être programmés via arduino.
(Rappel : Programmation Commande Bateau)
Pompes
Nous avons d’abord créer une pompe avec un petit moteur et des tubes, mais cela ne fonctionnait pas à 100% car nous avions un problème d’amorçage/réamorçage, nous étions obligés d’aspirer l’air bloqué dans la pompe afin de la lancer, et si l’angle de tir devenait trop important le même problème arrivait. Il était donc inenvisageable d’interrompre systématiquement le fonctionnement des robots.
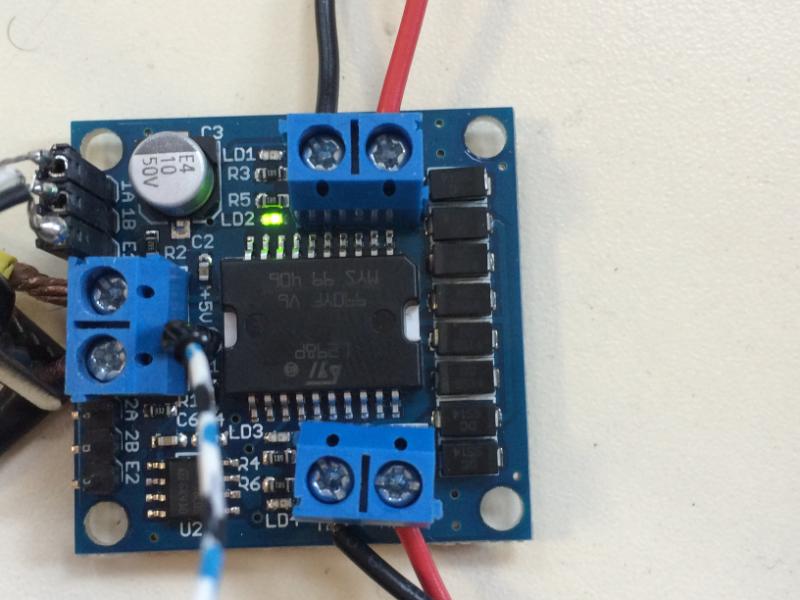
Notre solution fut d’acheter de nouvelles pompes. En ce qui concerne le programme pour l’activer, nous avons trouvé un schéma électrique pour gérer un moteur à courant continu avec une pin de l’arduino
Cela comprenait une diode anti retour, 2 résistances et un transistor npn.

Ça ne fonctionnait pas.
On a donc essayé de rajouter un transistor npn supplémentaire qui piloterait le précédent, mais ça ne résolvait pas le problème.
La solution fut finalement de remplacer le 1er transistor npn par un relais 12V qui est lui-même piloté par un transistor npn.

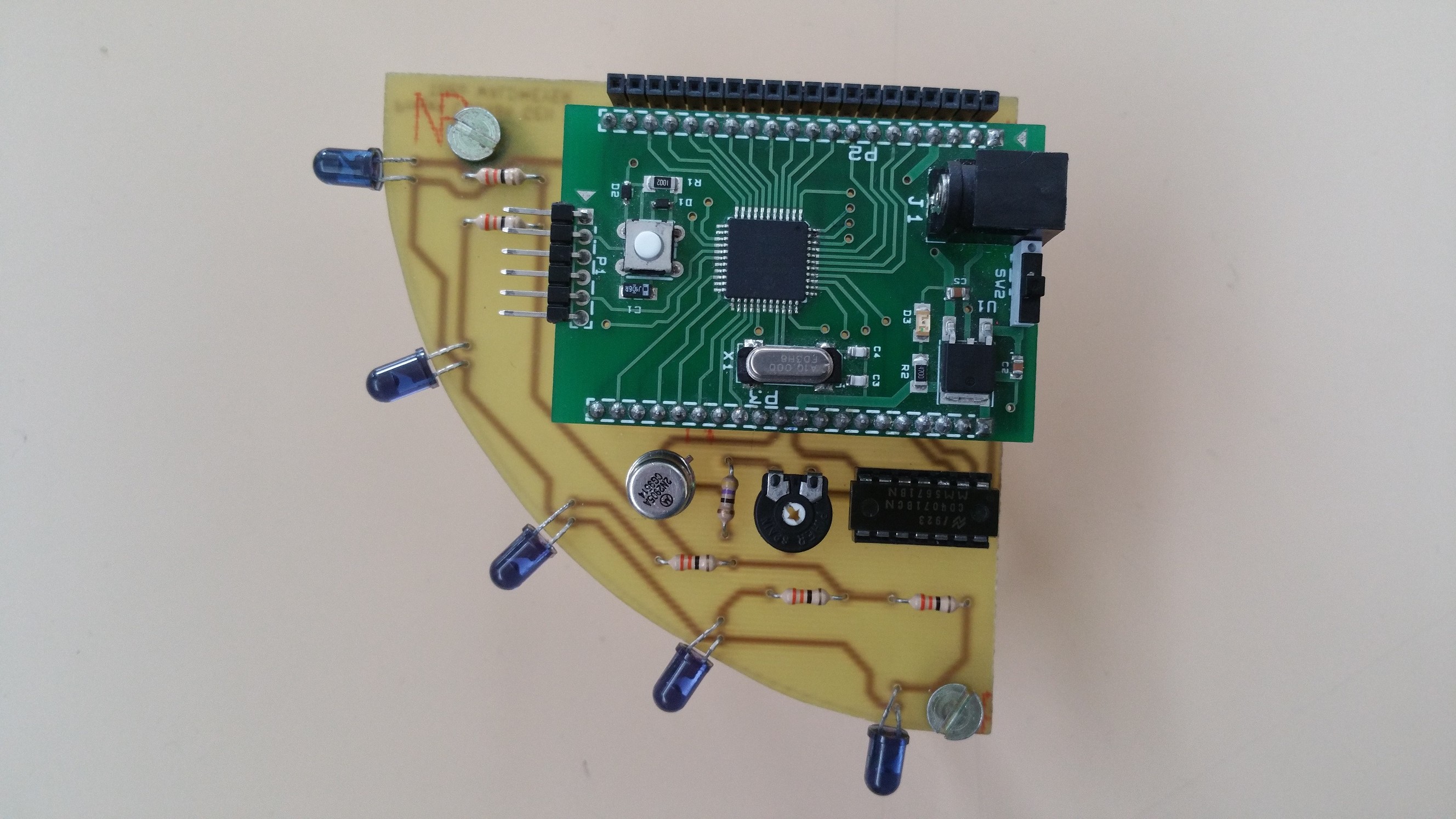
Caméra
Nous avions au départ un problème de batterie qui nous a même fait envisager d’enlever la caméra : en effet, la caméra s’éteignait au bout de quelques petites minutes. Finalement, nous avons changé de caméra et nous la rechargeons grâce à une batterie nomade en cas de besoin.
Nous avions aussi rencontré un autre problème qui empêchait cette nouvelle caméra de fonctionner, problème résolu par une mise à jour du firmware.
Gestion de projet
Etant donné notre effectif ( 7 personnes ) nous nous devions d’être rigoureux dans la gestion et l’administration des tâches. Nous avons pour cela créer un dossier Google Drive partagé entre nous, sur lequel nous nous sommes organiser pour être sur que tout le monde avance ensemble sur le projet, éviter que trop ou trop peu de personnes travaillent sur la même chose, et garder le fil quant à la direction que nous voulions donner au projet.
Manuel Technique
Pour reprendre notre projet, il faudra se référer au tableau budget afin d’identifier tout ce qui se trouve sur le bateau, et continuer de programmer différentes fonctions sur l’arduino en démarrant grâce à ce tutoriel qui explique les bases.
Ne pas oublier de bien regarder les caractéristiques des batteries pour savoir comment les rechargées.
Les robots étant faits pour des enfants, leur utilisation est très facile. Pour les robots combattants, il suffit de le brancher comme ceci la batterie et le moteur sur l’arduino :
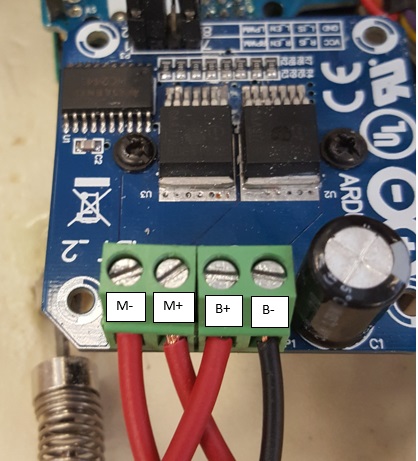
Puis de contrôler les bateaux à l’aide des manettes.
Le robot observateur est autonome, il suffit donc de le poser dans l’eau et de lancer le moteur à l’aide du branchement vu précédemment.
Bilan
Ces 4 semaines de projet nous ont appris à étudier pour directement mettre en application les notions vues, ce qui permet de mieux les acquérir et de pouvoir associé la théorie à la pratique.
Dans notre groupe de 7, nous avons aussi beaucoup travaillé afin de bien se répartir les tâches, de bien avancer ensemble et de profiter de notre effectif pour aller plus vite et plus loin dans le projet, pour éviter que cela se transforme en handicap et nous ralentisse.
Nous nous devions aussi d’aboutir à des résultats puisque nous nous sommes engagés auprès des enfants à leur fournir des robots qui fonctionnent et avec lesquels ils pourraient jouer, nous ne pouvions donc pas les décevoir.
Dans l’ensemble, nous avons rencontrés un bon nombre de problèmes de réalisations, étant donné que nous avions beaucoup de directions dans lesquelles nous pouvions aller, nous avons pris beaucoup de temps afin de bien définir le chemin que nous donnerions au projet, et nous avons rencontré plusieurs problèmes en chemin, essentiellement techniques dans la réalisation des robots et aussi dans la programmation. Cependant nous avons toujours trouvé des solutions à nos problèmes, et nous pourrions donc conclure en disant que notre plus gros problème fut de respecter les délais.
Ce projet nous a à tous beaucoup apporté, nous avons découvert tout ce qu’implique un projet lorsqu’on le mène de A à Z et on a pu se rendre compte de l’importance de la conduite de projet afin de ne pas perdre le fil malgré tout les imprévus qui peuvent intervenir.
Bibliographie
Voici les liens des sites qui nous ont aider à réaliser notre projet :
Tutoriel Arduino UNO
Moteur CC via Arduino
RS composants pour les datasheets
Driver moteur Arduino
Schéma électrique pour pompes
Programmation Commande Bateau
Voir tableau du budget pour les adresses du matériel acheté.
Remerciements
Nous tenons à remercier nos enseignants tuteurs Mr HUEBER et Mr CHOISY de nous avoir accompagnés et conseillés durant ce projet.
Nous adressons également un grand remerciement à Mr DE SABBATA qui nous a largement aidés pour la réalisation du projet.