

Robot Mobile
![]()
![]()
![]()
GEII 1A 2015-2016 MULHOUSE
Projet Robot Mobile

Membres du groupe:
- BRULANT Antoine
- DIAKHATE Matar
- JUNCK Kevin
- MARIAN JUDE Antony
- SCHNELL Vincent
- WAGNER Mickael
Présentation du sujet:
Dans le cadre du DUT Génie Électrique et Informatique Industrielle (G.E.I.I.) nous sommes amenés à réaliser un projet au courant du 2ème semestre. Cette année nous pouvions choisir entre 14 sujets différents. Nous avons choisis ce projet car nous nous sentons tous les 6 attirés par la robotique.
Notre projet est donc le suivant:
Nous devons concevoir et construire un robot qui devra être indépendant, on peut donc dire qu’il sera plus ou moins doté d’une intelligence artificielle.
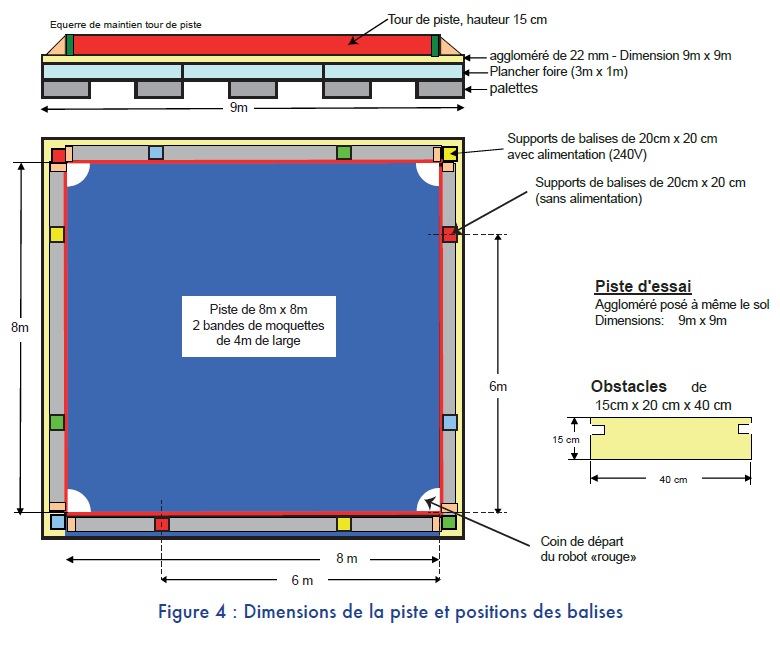
Le principe est simple, notre robot sera placé dans un coin du playground (dans ce cadre il s’agit d’une plate-forme utilisée pour tester un robot) de 8×8 mètres sur lequel seront placés des obstacles. Le but de la manœuvre étant que le robot atteigne le coin opposé du playground le plus rapidement possible et qu’une fois arrivé, il crève un ballon gonflable accroché sur son toit. Pour ce faire nous avons le droit d’utiliser tous les capteurs possibles et nous avons aussi le droit de placer jusqu’à 3 balises autours du ring pour pouvoir guider notre robot vers l’arrivée. Cependant un châssis nous est imposé.
Cahier des charges :
Bête à corne :
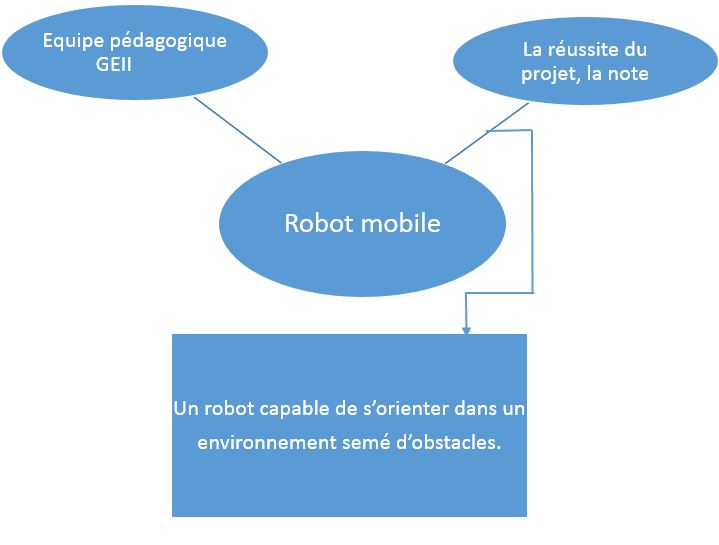
Diagramme Pieuvre :
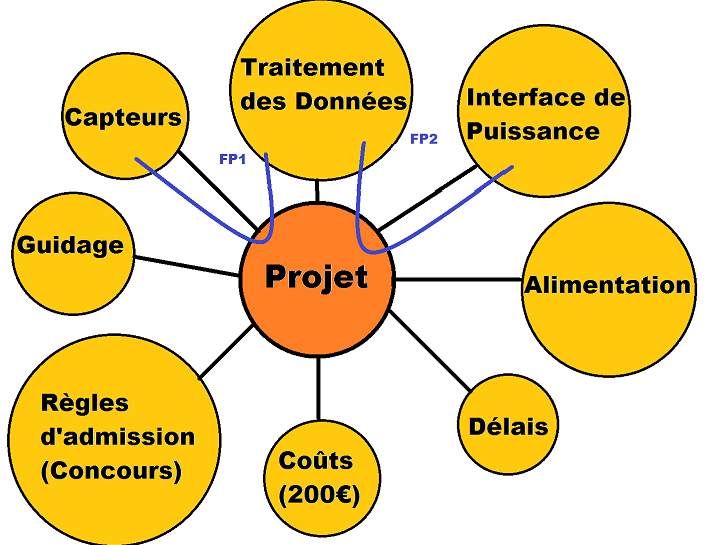
Pour résumer le diagramme pieuvre ci-dessus:
- Le robot doit avant tout être capable de traiter les informations acquises à travers les capteurs et de se déplacer en fonction de celles-ci pour accéder à l’arrivée.
Cependant pour respecter les contraintes qui nous sont imposées le robot devra :
- Traiter des informations grâce à un microcontrôleur (PIC 18F4520)
- Être équipé de capteurs pour pouvoir détecter des obstacles
- Être guidé par des balises
- Remplir les conditions d’admission au concours robotique de Cachan
- Être réalisable avec un budget de 200€
- Être terminé avant la présentation finale qui aura lieu fin Juin
- Alimenté à partir d’une batterie 12V placée sur le robot
- Posséder des moteurs et une interface de puissance pour pouvoir se déplacer
Gestion du projet:
Nous avons très rapidement compris qu’on pouvait découper notre projet en 3 parties afin de réaliser un robot conforme au normes imposées.
Ces 3 parties sont les suivantes:
- La motorisation du robot
- Détection d’obstacles
- Le guidage sur le playground
Nous sommes un groupe de 6 personnes,donc nous avons décider de nous diviser en 3 sous-groupes de 2 personnes afin de traiter toutes les parties simultanément.
1. Motorisation

Ainsi pour ce qui est de la partie motorisation du robot, Vincent et Matar ont utilisé des ponts en H dans le but de contrôler le sens de rotation du moteur ainsi que des sorties PWM (Pulse in With Modulation) afin de pouvoir gérer la vitesse de rotation des moteurs à l’aide d’une tension continue.
Test de la Motorisation
2. Détection
Pendant ce temps, Antony et Antoine se sont concentrés sur la détection des obstacles. Ils ont fini par conclure que l’outil le plus adapté pour repérer des obstacles est le capteur à ultrasons. Ainsi,il nous suffira d’envoyer des ondes dans la direction vers laquelle se déplace notre robot et de mesurer le temps que prendra l’onde pour revenir.Cela permettra de savoir à quelle distance se trouve l’obstacle et ainsi nous pourrons éviter tout obstacle qui se dressera devant notre robot.

Vidéo du fonctionnement de la partie Motorisation et Détection
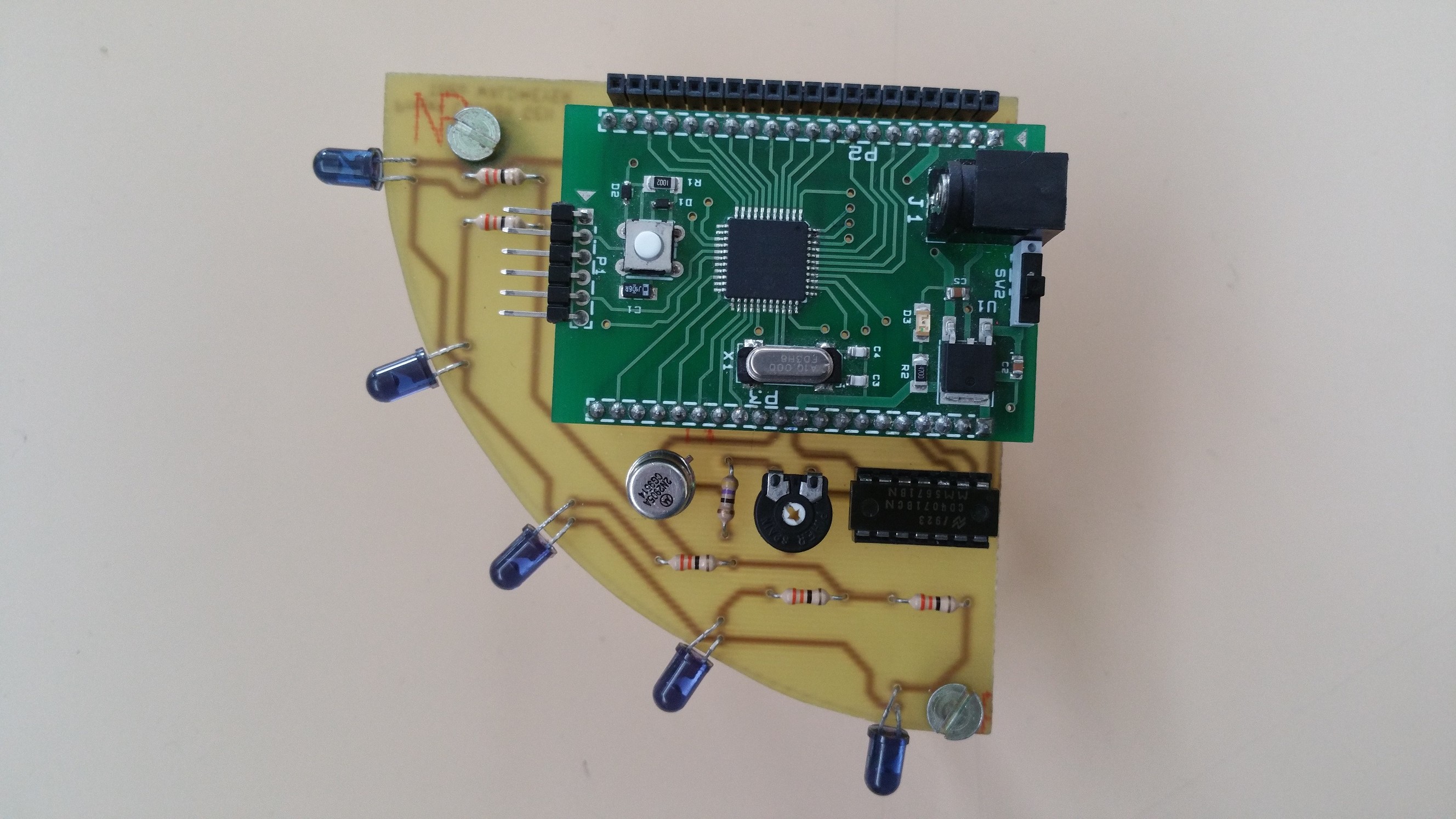
3. Guidage
Mickaël et moi,nous avons travaillé sur cette 3ème partie. Après avoir évaluer toutes les solutions qui s’offraient à nous, nous avons conclu qu’utiliser une balise infra-rouge reste la meilleure option possible compte tenu de notre budget et de la durée du projet. Nous avons donc repris la balise qui a été fabriquée par le groupe de projet de l’année dernière et nous avons reprogrammé le microcontrôleur PIC18F4520 qui sera d’ailleur notre plate-forme de programmation tout au long du projet.
Bilan:
Actuellement,les 3 parties qui sont essentielles à la réalisation de notre robot sont terminées. Dans chacune des parties nous avons opté pour les méthodes les plus répandues pour la simple et bonne raison que ce sont les plus sûrs et les plus précises.
Pour ce qui est de la motorisation,nous choisissons d’utiliser deux moteurs (un pour chaque roue) alimentés en PWM à l’aide d’un pont en H ainsi nous pouvons contrôler la vitesse et le sens de rotation.
Pour la détection d’obstacle,les émetteurs et récepteurs ultrasons ont été simple à contrôler et leurs précisions sont largement suffisantes pour subvenir à nos besoins ce qui justifie notre choix.
Pour le guidage,nous avons fait le choix d’utiliser des balises infrarouges car c’était la meilleure solution dans notre cas,compte tenu du fait que les autres solutions n’étaient pas réalisables avec notre budget ou étaient trop difficiles a mettre en œuvre.
Actuellement nous avons chacun fini nos parties mais nous n’avons pas encore pu mettre en commun pour créer un prototype. Cependant nous allons attaquer cette dernière phase du projet dans les jours à venir pour pouvoir finir notre projet dans les délais.
Conclusion:
Ce projet nous a aidé a mieux appréhender le travaille en équipe et nous a permis d’appliquer tous les cours théoriques que nous avons eu depuis le début de l’année.
Cependant nous nous sommes tous rendu compte que mener à termes un projet n’est pas toujours aussi facile que l’on le pensais. Nous avons dû faire beaucoup de recherches sur différents sujets pour pouvoir réaliser chacun nos parties. La partie programmation a été l’une des difficultés majeurs dans ce projet car nous n’avions jamais programmé un PIC auparavant.
Nous avons tous réalisé que lorsque nous rencontrons des problèmes,il est préférable de travailler tous ensemble pour résoudre le problème en vitesse et sans ambiguïté.
Au final nous sommes tous d’accord sur le fait que cette expérience est des plus enrichissantes car nous rencontrons de nombreux problèmes que nous serions souvent incapable de résoudre seuls, mais nous apprenons à les surmonter ensemble en équipe, ce qui nous permet de repousser nos limites et d’accélérer notre productivité
