

RESUME
Ce projet a pour objectif la conception et la fabrication d’un module autonome ayant la capacité de prendre certaines mesures physiques .(température, pression, humidité et position GPS). Ce système devra stocker ces données pour les transférer par la suite à un ordinateur.
Il sera utilisé dans de condition extrêmes puisque son but sera d’être utilisé lors d’une ascension du Mont Blanc.
SOMMAIRE
- Introduction
- Présentation du projet
- Cahier des charges
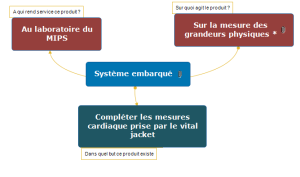
-Bête à corne
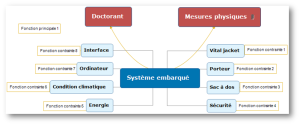
-Pieuvre
-Emploi du temps prévisionnel
-Emploi du temps réel
-Budget
- Développement
-Semaine du 29 Février 2016
-Semaine du 8 Mars 2016
-Semaine du 14 Mars et du 21 Mars 2016
-Dernières semaines jusqu’à la fin du projet
- Gestion du projet
- Perspectives
- Bilan
- Conclusion
INTRODUCTION
Début Juillet, un petit groupe d’étudiants, de professeurs ainsi que nous même (Clément MEREDIEU et Gabrielle HURÉ), allons faire l’ascension du Mont Blanc.

PHOTO DU MONT BLANC
Nous serons aussi accompagnés tout le long de cette aventure, par deux doctorants, travaillant sur un projet innovant, nommé vital jacket.
Le vital jacket, est un T-shirt aillant pour but de mesurer l’électrocardiogramme (l’intensité électrique du cœur) ainsi que le phonocardiogramme (le son du cœur) afin d’aider la médecine dans le dépistage de maladies cardiovasculaires.
Le lien entre le projet mont blanc et le vital jacket, et de tester ce matériel dans des conditions extrêmes (froid, altitude) ainsi que de donner aux doctorants une référence de mesure pendant un effort intense.

En parallèle, nous avons dans le cadre de nos études de deuxième semestre en GEII Mulhouse, la tâche de réaliser un projet lié à l’électronique et l’informatique. Nous avons donc choisi de le rattacher à notre projet Mont Blanc.
PRÉSENTATION DU PROJET
Notre projet aura pour but de compléter les mesures du vital jacket, afin d’offrir une base de données plus conséquente aux Doctorants.
Pour ce faire, nous avons décidé de concevoir un système embarqué dans un module autonome, aillant pour but de prendre des mesures physiques : Température, pression atmosphérique, humidité, et position GPS.


HUMIDITÉ TEMPÉRATURE PRESSION POSITION GPS
<<Un système embarqué ou module autonome est défini comme un système électronique et informatique autonome, souvent en temps réel, spécialisé dans une tâche bien précise>> (Wikipédia)
Nous pourrions rajouter, qu’un système embarqué est aussi indépendant de toute source du réseau électrique, donc contient sa propre source d’énergie.
Ce projet d’étude, se déroule sur toute la durée du deuxième semestre, et fera l’objet d’une soutenance finale et sera évalué, à la fin du semestre.
CAHIER DES CHARGES
- Bête à corne
- Diagramme en pieuvre
| N° | Fonction | Critères | Niveau |
| FP1 | Mesurer et stocker les variations physiques pour les doctorants |
Informations à mesurer : -Température extérieure -Pression/altitude -Humidité -Position GPS Fréquence des mesures |
-25°C< T°C <40°C 0 bar< P bar < 2 bar 0% < H < 100% 5 m de précision Toutes les 5 minutes |
| FC7 | Communiquer avec un ordinateur |
USB Compatibilité windows 7/10, mac OS |
Liaison série |
| FC1 | Synchroniser avec vital jacket |
Soit une synchronisation Soit une date de commencement commune, et une fréquence des mesures commune |
|
| FC2 | Adapter au porteur | Exigence des guides sur le poids du matériel | Poids du module max 800g |
| FC8 | Communiquer avec le porteur | Interface d’information LED |
-Marche/arrêt -Niveau de batterie -Prise de mesures |
| FC3 | Dimensionner pour un sac à dos | Dimension d’une poche de sac à dos | Encombrement d’une gourde : 25cm de hauteur, 8cm de diamètre |
| FC4 | Sécuriser le module |
-Ne pas blesser l’utilisateur -Ne pas endommager le sac -Empêcher les court-circuit -Les échauffements important |
Attention aux bords tranchants, pointes Arc électrique, étincelle A quantifier |
| FC5 | Accéder à une source d’énergie |
-Réseau électrique Français -Réseau Italien -Hors branchement |
230 V, 50Hz 230 V, 50Hz L’appareil doit pouvoir fonctionner hors alimentation, pendant 52 h |
| FC6 | Adapter aux conditions climatiques |
-Température -Pression -Humidité |
Chamonix en été environs 40°C Au sommet la température peut descendre jusqu’à -40°C en fonction du vent. 1 bar à Chamonix, 0,5 bar au sommet taux d’humidité pouvant monter jusqu’à 70% |
- Emploi du temps prévisionnel
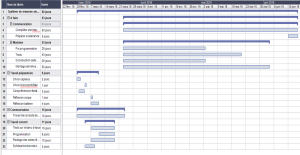
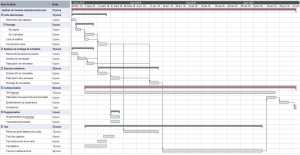
- Emploi du temps réel
- Budget
Les achats seront possibles à concurrence de 200€ exclusivement sur le site de Radiospares. Les dépenses devront être budgétisées et approuvées par l’enseignant référent.
DÉVELOPPEMENT
Dans cette rubrique, nous allons détailler chaque étape de l’avancement de notre projet semaine après semaine.
Semaine du 29 Février 2016 :
- Nous avons recherché les capteurs adéquats, en fonction de nos contraintes de départ et de nos plages de mesure.
| Capteur | Plage de mesure | Tension | Dimension | Résolution | Référence | Interface |
| Température | -25°C<T°C<40°C | 2.1/3.6 V | 3x3x1.1 | 12 bits | SHT21 | I2C |
| Humidité | 10%<H%<100% | 2.1/3.6 V | 3x3x1.1 | 14 bits | SHT21 | I2C |
| Pression | 500hPa<P<1030hPa | 1.8/3.6 V | 5x3x0.95 | 24 bits | MS560702BA03-50 | I2C |
| GPS | précision de 5 m | 1.5/5.5 V | 22x22x8 | 440 bits | GPS-622F | I2C |

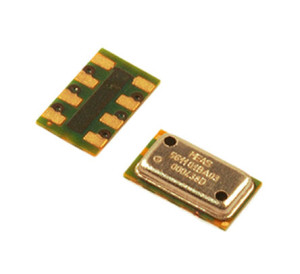

CAPTEUR DE TEMPÉRATURE ET D’HUMIDITÉ CAPTEUR DE PRESSION CAPTEUR GPS
- Nous avons pris la décision de créer deux modules séparés, un module pour les capteurs des grandeurs physiques (Température, humidité, pression) et un autre module pour la position GPS, nous permettant ainsi de réduire la consommation, donc d’augmenter l’autonomie de la batterie, et de réduire le stockage de données dans une mémoire.
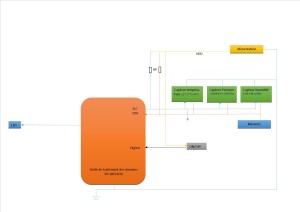
SCHEMA FONCTIONNEL DU MODULE CAPTEURS
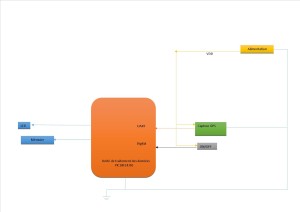
SCHEMA FONCTIONNEL DU MODULE GPS
- Le choix des microcontrôleurs s’est effectué sur la liste des PIC de chez Microsheep, car la programmation de Pic fait partie du cursus du GEII de Mulhouse. Il s’est aussi basé sur plusieurs caractéristiques :
-faible tension d’alimentation (environs 3,6 Volts),
-une sortie USART,
-une interface I2C,
-programmable par PicKit2,
-Et évidemment, adapté aux contraintes climatiques du Mont Blanc (voir le cahier des charges).
Nous avons donc choisi deux PIC 18F24J50.

- Il nous a fallu aussi faire la recherche des mémoires adaptées à la taille de nos données, ainsi qu’à l’interface I2C (interface utilisée pour les capteurs). Nous avons donc dû dimensionner la taille des mémoires.

TABLEAU DE LA TAILLE DES DES MESURES
Pour avoir une marge de manœuvre, nous avons surdimensionné les mémoires, et donc choisi des mémoires de 256ko.
- Il nous a fallu par la suite faire l’étude du fonctionnement de l’interface I2C, qui nous était inconnue.
C’est une interface fonctionnant sur deux bus commun à chaque composant I2C
Le SDA : bus de données,
Et le SCL : bus de l’horloge.
La structure de cette interface est une conversation Maître-esclave. Le microcontrôleur demande au capteur la donnée. Le capteur lui répond en envoyant la donnée. Puis le microcontrôleur traite la donnée, et la stocke immédiatement dans la mémoire.
Chaque transmission de donnée est ponctuée d’un accusé de réception appelé « ACK »
Une explication plus technique et détaillée vers ce lien « https://fr.wikipedia.org/wiki/I2C »
Semaine du 8 Mars 2016 :
- Pour communiquer avec l’utilisateur, le module sera équipé de LED. Nous avons donc choisi une LED rouge indicatrice du niveau trop faible de la batterie, et une LED bleue indiquant l’allumage et la mise hors tension du module, ainsi que la prise d’une nouvelle mesure.
- Nous avons étudié la forme et l’aspect du module, que ce soit pour la coque extérieure, comme la carte électronique, ainsi que le choix des matériaux.



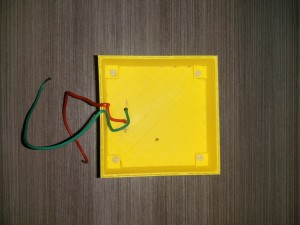
PHOTOS DU BOITIER
- Il a ensuite été question de programmer et de tester le programme de récupérations des données d’un capteur de température, et de stockage dans une mémoire, grâce à un banc d’essai et de composants similaires aux notre (en I2C) prêtés par l’IUT.
 PHOTO DU BANC D’ESSAI
PHOTO DU BANC D’ESSAI
Semaine du 14 Mars et du 21 Mars 2016 :
- Les dernières retouches sur les programmes ont été effectuées. Ainsi, le transfert des informations provenant du capteur de température dans la mémoire a été long mais a été un succès. D’un autre côté, nous avons aussi lu la mémoire. Il ne reste plus qu’à réécrire un programme similaire mais fonctionnant pour nos capteurs et notre microcontrôleur.
- Nous avons enfin commandé nos composants sur le site de RS.
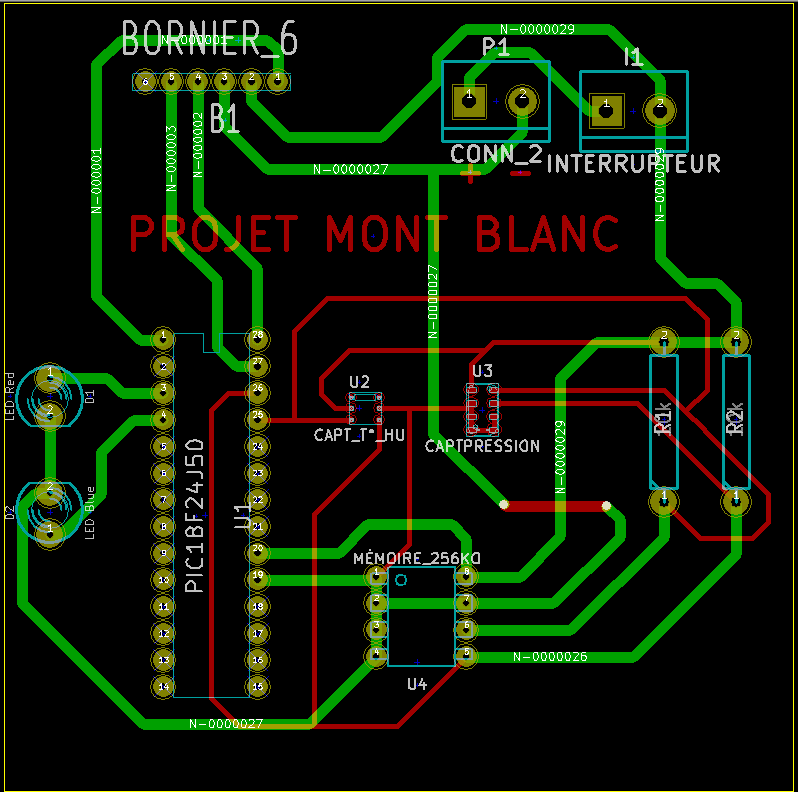
- Le routage de la carte électronique a été effectué . Celle-ci a une forme carré afin de pouvoir l’insérer dans un boitier cubique. Elle a également été routée sur les deux faces. Les composants ont tous été placés du même côté, sur la face supérieure. Les batteries, elles seront disposées à la base du cube, sous la plaque. Ainsi, les batteries n’abimeront pas les composants.
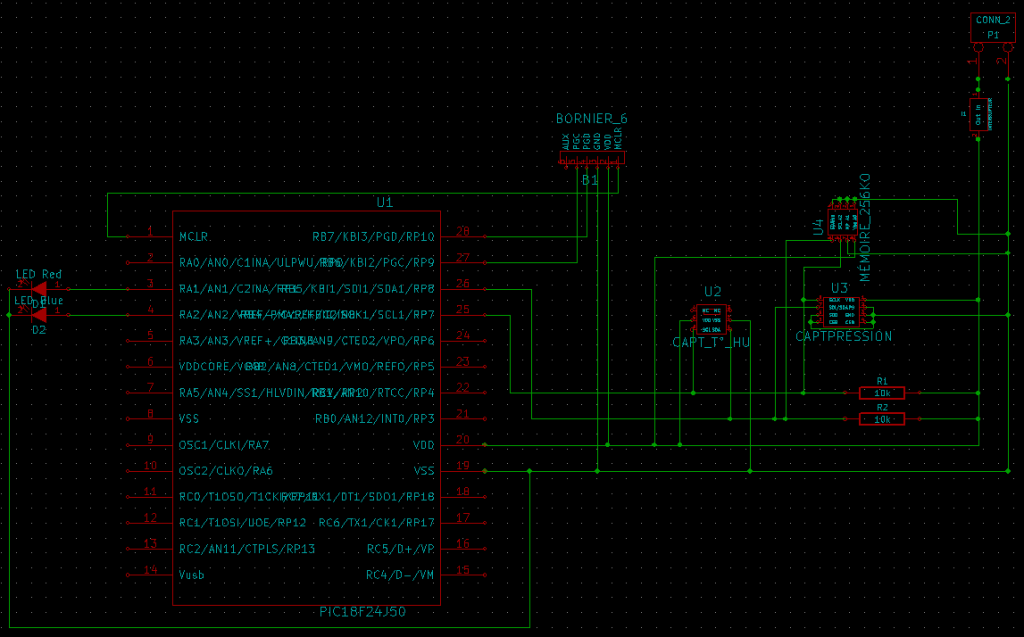
SCHEMA DE LA CARTE SUR KICAD
ROUTAGE DE LA CARTE ELECTRONIQUE SUR KICAD
Dernières semaines jusqu’à la fin du projet :
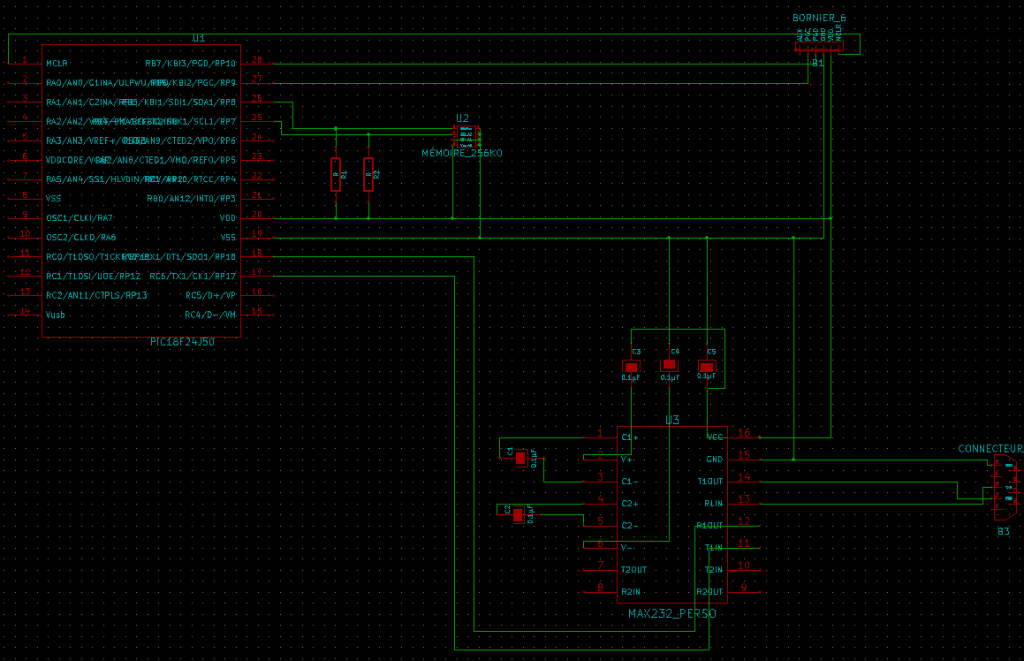
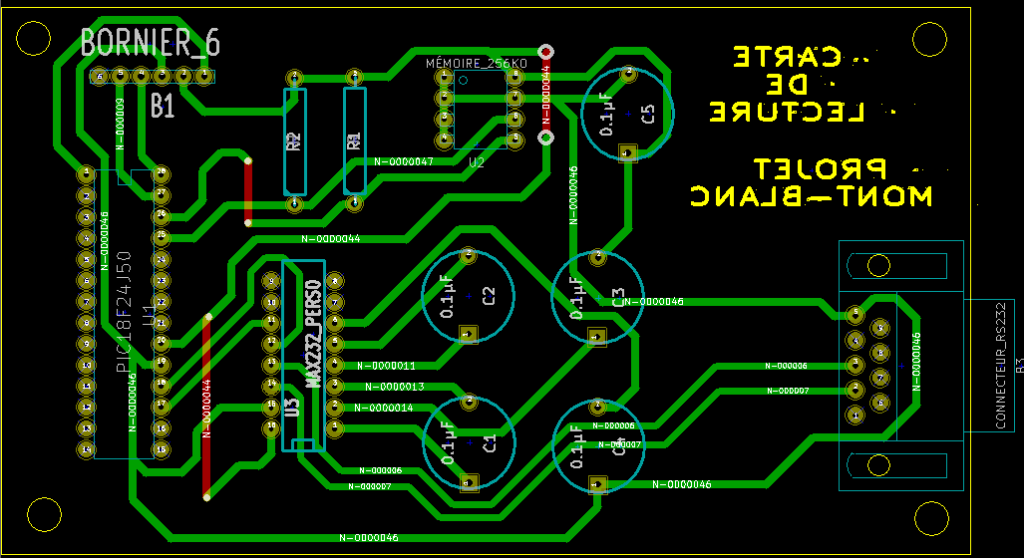
- Nous avons choisi par rapport aux difficultés rencontrées dans le projet et du temps restant, de ne pas fabriquer la carte GPS, mais seulement la carte précédemment réalisée et une carte permettant la lecture de la mémoire à la fin de l’ascension. En effet, la mémoire est installée sur un support et peut ainsi être déplacée d’une carte à l’autre.
- Nous avons fait le programme permettant le stockage des données dans la mémoire.
- La carte de lecture de la mémoire, ainsi que le programme correspondant on été fabriqué.
SCHEMA DE LA CARTE SUR KICAD
ROUTAGE DE LA CARTE ELECTRONIQUE SUR KICAD
- à l’heure actuel, nous effectuons les tests des programmes et des cartes associées.
GESTION DU PROJET
Tout au long du projet nous avons appris à nous répartir le travail équitablement mais de manière à ce que chacun fasse ce qu’il préfère et ce qu’il réussit le mieux.
Nous avons aussi dû gérer notre temps et planifier chaque semaine en fonction de l’avancement du projet, des objectifs principaux, des points plus ou moins cruciaux et surtout des difficultés.
Nous nous sommes répartis le travail comme suit :
- Clément s’est occupé de la conception de la carte électronique et de sa fabrication.
- Gabrielle a plutôt fait la parie programmation.
Mais nous pouvions compter l’un sur l’autre pour s’aider et nous avons surtout réfléchi à la manière de concevoir notre projet et nous avons fait toute la partie gestion de projet et communication ensemble.
Bien entendu nous avons pu compter sur l’aide de M. Vigne et M. Mourllion pour la compréhension du mode de fonctionnement de nos composants ainsi que pour résoudre certains problèmes de programmation. M. De Sabata, nous a pour sa part aidé à la fabrication des plaques électroniques, et du boitier du module.
PERSPECTIVES
Comme nous avons pu l’expliquer précédemment dans l’introduction, notre module autonome ne sera pas simplement un projet d’« études et réalisations » de dut. Il sera utilisé lors de l’ascension du Mont Blanc et permettra surtout d’aider les chercheurs du laboratoire du MIPS dans leurs études avec le Vital Jacket.
![]()
En dehors de ce projet, ce module pourrait très bien être utilisé comme station météo en temps réel.
Plus tard nous pourrions envisager de créer le même module, mais tout en un. C’est à dire, faire une seul carte qui allie écriture et lecture de la mémoire, et faire en sorte que le transfert de donnée se fasse vie USB, dans une base de donnée Excel.
Il est envisageable aussi de reprendre le projet du module gps, et de l’intégrer sur la même carte.
La miniaturisation de tout ce module, serait aussi une possibilités.
BILAN
A l’heure actuelle, nous avons fabriqué toutes les cartes électroniques et les programmes permettant l’écriture des données dans la mémoire, ainsi que sa lecture.
Le boitier du module est construit et testé.
Nous en somme à la dernière étape, celle des tests du module, pour nous assurer le bon fonctionnement de l’appareil, ainsi que sa fiabilité.
CONCLUSION
Le fait de travailler sur ce projet nous apporté beaucoup et nous a fait apprendre d’une manière différente des cours habituels.
Nous avons surtout appris à gérer un projet que ce soit le temps, la répartition des tâches ou le déroulements des étapes.
Dans le domaine de la programmation, ce travail nous a permis de découvrir deux types de liaison (série et I2C) mais aussi de savoir programmer différents PIC. Le progrès le plus important a été la compréhension des datasheets, y compris celles des microcontrôleurs.
Pour le côté électronique, nous avons surtout pu appliquer les connaissances acquises en cours et lors de la réalisation électronique du premier semestre.
Nous avons pris plaisir à faire ce projet, puisque nous allons tout d’abord pouvoir le tester dans un contexte original mais aussi car malgré la difficulté et les contre-temps, nous avons réussi à trouver les solutions, et à travailler comme nous le souhaitions en amont du projet.
En outre, les compétences les plus importantes que nous avons appris, sont :
-la gestion d’un projet.
–lire, comprendre, et chercher les information importante dans une datasheet.
-une programmation différente que celle vue en cours.