


Synthèse du projet de pilotage synchronisé de moteurs asynchrones
Sommaire
- Introduction
- Cahier des charges
- Bête a corne
- Diagramme pieuvre et Tableau des fonctions
- Étude de l’installation
- Ancienne installation
- Installation actuelle
- Développement du pilotage synchronisé
- Moteur asynchrone
- Moteur Pas à Pas
- Servomoteurs
- Conclusion
- Annexe
1.Introduction
Dans le cadre de notre projet d’étude et réalisation, nous avons réalisé un projet permettant la commande synchronisé de deux moteurs asynchrones. Ce projet à été fait durant le Semestre 3 et 4. Nous avons eu pour objectif d’élaborer un banc d’expérimentation et de démonstration du contrôle de mouvement synchronisé basé sur deux moteurs asynchrones. Lors de ce projet nous avons 2 grandes parties qui ce sont dégagées. Nous avions une première partie sur l’étude et la réalisation de l’installation. Celle-ci consistait à étudier l’ancienne installation ayant seulement un moteur asynchrone, puis dans un second temps réaliser l’installation complète ayant deux moteurs asynchrones. La seconde partie concerne le développement des commandes pour les moteurs asynchrones. Pour cela nous avons tous d’abord étudié et développé des commandes de base sur différents types de moteurs. Puis dans un second temps nous avons développé les commandes et la visualisation des moteurs asynchrones avec leurs colonnes lumineuses.
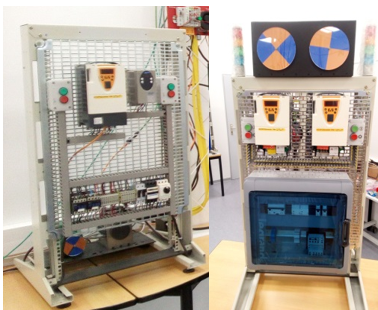
Récapitulatif de l’ensemble de l’installation avant/après
Cahier des charges
Bête a corne
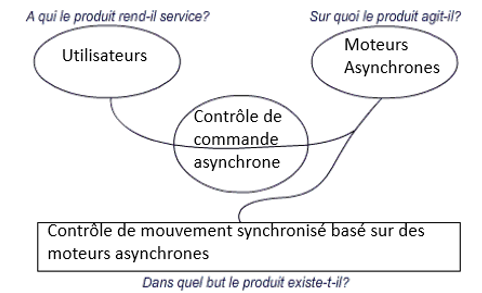
Ce projet doit permettre la synchronisation du mouvement de deux moteurs asynchrones grâce au contrôles de commandes
Diagramme pieuvre et Tableau des fonctions
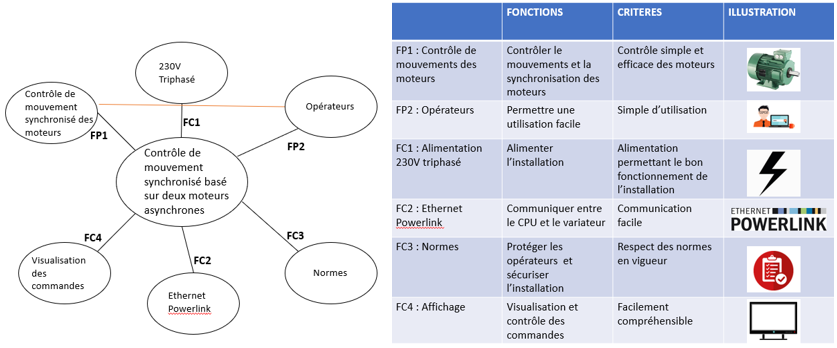
FP1: Contrôle de mouvement synchronisé des moteurs : Pouvoir contrôlé la synchronisation des moteurs
FP2: Opérateurs : Permettre une utilisation facile des commande
FC1: Alimentation 230V triphasé : Alimenter l’installation en 230V triphasé
FC2: Ethernet Powerlink : Communiqué grâce à Ethernet
FC3: Normes : Respecter les normes de protection et de sécurité
FC4: Visualisation des commandes : Avoir une visualisation complète et fonctionnelle
Étude de l’installation
Ancienne installation
Dans un premier temps nous avons étudié l’ancienne installation. Cela avait pour but de comprendre le fonctionnement de l’installation ainsi que de connaître les principaux composants de celle-ci. Par la suite nous avons fait un croquis de l’installation pour avoir un schéma propre et compréhensible.
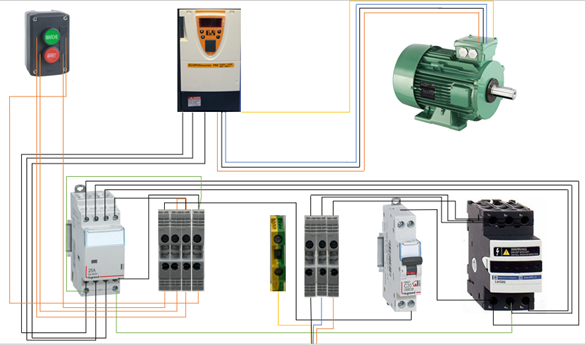
A la suite de ce schéma nous avons réalisé plusieurs autres schémas allant de la partie alimentation à la partie commande du moteur. Lors de l’étude de la partie alimentation, nous nous sommes aperçus que certains équipements étant assez anciens ont dû être changés. L’installation est alimentée par un transformateur triphasé produisant du 230V. Le moteur asynchrone est câblé en couplage triangle. Pour la partie commande, nous avons remarqué que la boitier de marche/arrêt est alimenté par une phase du 230V triphasé.
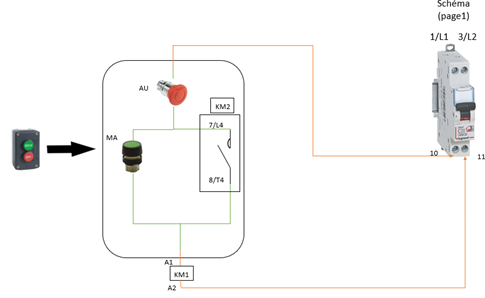
Sur le schéma ci-dessus nous avons le boitier Marche/Arrêt ainsi que son équipement de sécurité qui sont représenté. Nous pouvons voir que KM1 et KM2 permettent la connexion des différentes phases pour alimenter le variateur du moteur asynchrone. Nous pouvons voir que le contacteur permet de faire la connexion entre la partie puissance et la partie commande de l’ensemble variateur/moteur.
Installation actuelle
Après avoir étudié l’ancienne installation, nous avons conçus le schéma de la nouvelle installation. Celle-ci ressemble à l’ancienne installation avec quelques modifications.
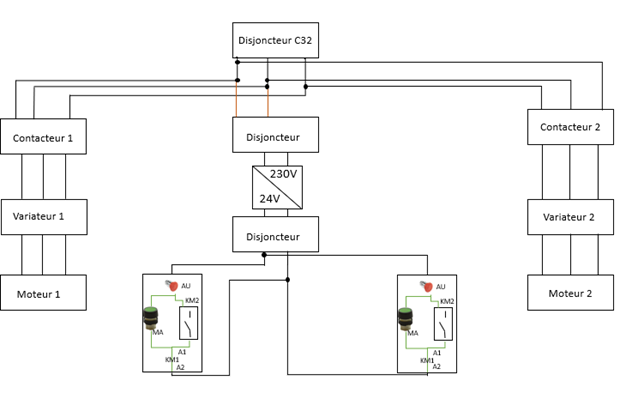
L’installation permettra de piloter deux moteurs asynchrones avec deux variateurs. Pour cela nous avons juste à réalisé l’installation en double comme sur le schéma ci-dessus. Les boitiers de Marche/Arrêt ne seront plus alimentés par une phase du 230V triphasé mais ils seront alimentés en 24V. Pour cela nous devons intégrer un transformateur 230/24V. Celui-ci permet d’avoir 230V au primaire et 24V au secondaire. Nous avons rajouté deux disjoncteurs, le premier en amont et le second en aval du transformateur.Cela permet la protection des boitier Marche/Arrêt. Le reste de l’installation reste en 230V triphasé. Son fonctionnement reste similaire à l’ancienne installation. Les deux nouveaux ensembles variateurs/moteurs sont installés sur une même grille, pour avoir les deux ensembles côte à côte.
Développement du pilotage synchronisé
Moteur asynchrone
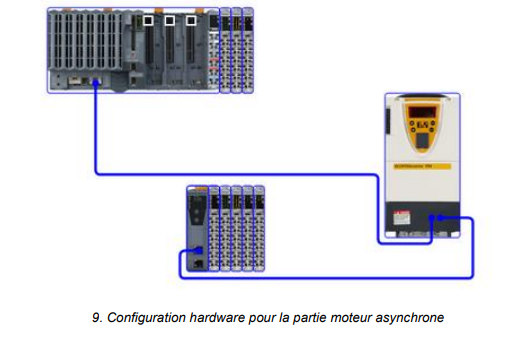
Nous avons commencé à étudié le pilotage du moteur asynchrone grâce à un ancien projet d’étudiants. Cela nous a permis de prendre en main le logiciel Automation Studio. Par la suite nous avons étudié les commandes existantes permettant de contrôler le moteur en créant une configuration permettant de relier la partie matérielle a la partie logicielle comme on peut le voir dans l’image suivante.
Pour pouvoir interagir avec le moteur, nous avons testé toutes les commandes étant déjà en place sur l’interface Homme-Machine. Nous pouvions par exemple démarrer,arrêter où choisir la vitesse de rotation du moteur. Par la suite nous avons améliorer le programme ainsi que l’interface. Nous avons ajouté et vérifié si toutes les variables étaient correctes et nous les avons fait apparaître sur l’interface.
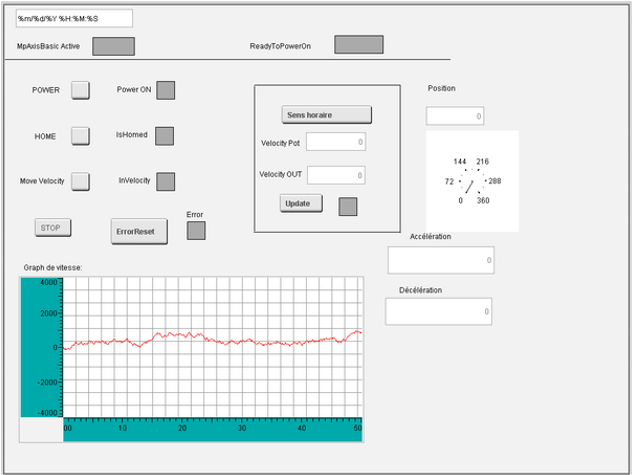
Ci-dessus nous avons l’interface Homme-Machine du moteur asynchrone. Pour pouvoir démarrer le moteur nous devons suivre quelques étapes. Tous d’abord la variable « MpAxisBasic » doit être activé. Elle permet de contrôlé l’axe du moteur et à été ajouté par nos soins pour pouvoir choisir le type d’axe que nous voulons pour plus tard. Puis la variable « Power » doit être activé ainsi que la variable « Home ». La variable « Power » met le moteur en marche et la variable « Home » met le moteur en position initial. Puis nous mettons en marche la variable « Move Velocity » qui va faire tourner le moteur si une valeur est donnée. Nous avons un graphique qui trace l’évolution de la vitesse du moteur en fonction du temps. Par la suite nous avons rajouté 2 nouvelles variables une pour la décélération et une pour l’accélération. Nous pouvions donc entrer une valeur dans ces deux variables et voir que le graphique changeait selon les valeurs rentrées. Pour arrêter le moteur nous avions la variable « Stop » et si un problème survenait nous avons la variable « ErrorReset » qui permettait de remettre à zéro toutes les variables pour pouvoir redémarrer le moteur.
Moteur Pas à Pas
Après avoir étudié le moteur asynchrone, nous nous sommes intéressés aux moteurs Pas à Pas. Nous nous sommes aidés de l’interface faite précédemment pour cette partie. Dans cette partie nous devions créer et utilisé une visualisation comportant 2 couplages. Nous aurions le choix entre un couplage linéaire et un couplage CAM entre les deux moteurs. Nous avons réutilisé le programme et les blocs utilisé dans la partie précédente pour vérifier le bon fonctionnement des moteurs. Pour la suite de cette partie nous avons créer 2 blocs permettant de contrôler un moteur chacun et un troisième bloc pour gérer le couplage entre les deux moteurs.
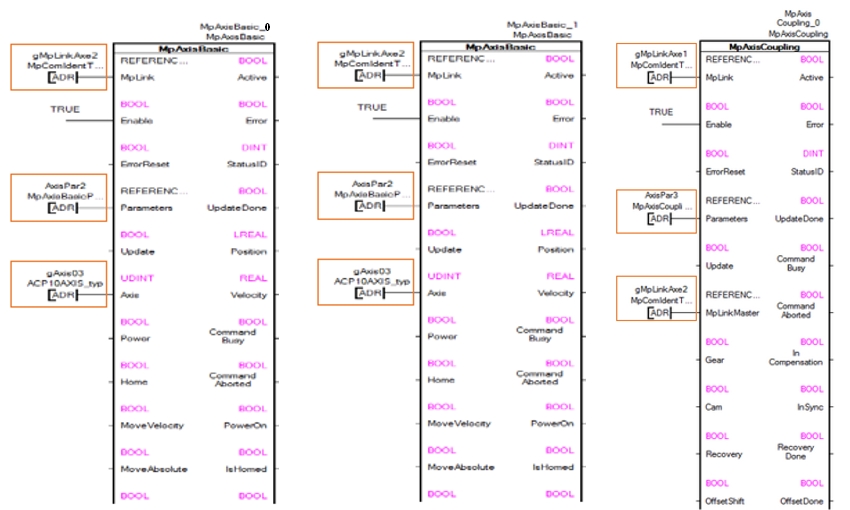
Le premier bloc nommé « MpAxisBasic_0 » permet de contrôle l’axe d’un des deux moteurs, celui-ci servira d’axe maître. Les 3 variables les plus importantes de ce bloc sont encadrer en rouge. La première variable « gMpLinkAxe2 » permet de gérer la mise en route du moteur maître. La seconde variable « AxisPar2 » quand à elle permet de gérer les réglages du moteur (sens de rotation,vitesse de rotation…). Puis la dernière variable « gAxis03 » permet l’identification de notre axe maître par rapport à l’axe esclave. Nous avons un second bloc similaire appelé « MpAxisBasic_1 » qui permet de contrôler le second moteur.
Le second bloc nommé « MpAxisCoupling » permet de contrôlé l’axe et le couplage du moteur esclave. Nous aurons le choix entre le couplage linéaire ou le couplage CAM. Le couplage linéaire ressemble à des roues dentées de son fonctionnement donc nous choisissons la vitesse de multiplication de l’axe esclave par rapport à l’axe maître. Cette axe suis les besoins de l’axe maître mais est plus difficile à mettre en place pour un mouvement balancier. Contrairement au couplage linéaire, le couplage CAM est quand à lui beaucoup plus performant. Ce couplage permet d’utilisé n’importe qu’elle sens de manière précise et efficace. Les 3 variables les plus importantes sont aussi encadrées en rouges. La première variable « gMpLinkAxe1 » permet de gérer la mise en route du moteur esclave. La seconde variable « AxisPar3 » quand à elle permet de gérer les réglages du couplage. Puis la dernière variable « gMpLinkAxe2 » permet la représentation de l’axe maître que l’axe esclave va devoir suivre.
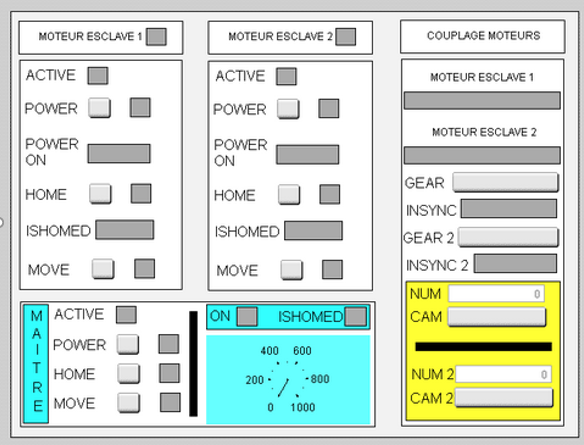
Après avoir crée les différents blocs nous avons introduit les nouvelles variables sur l’interface. Nous avons une partie pour activer et commander l’axe maître. Puis nous avons une seconde partie pour activer l’axe esclave. Pour finir nous avons une partie permettant de voir si les moteurs sont prêt à être couplés puis nous pouvons choisir entre les 2 couplages différents. Nous pouvons donc choisir de contrôler les moteurs de manière séparé ou de manière couplé.
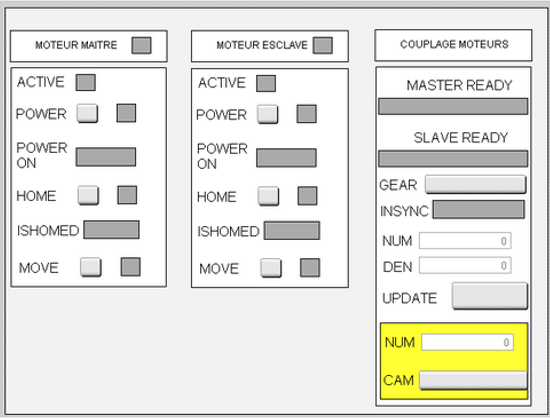
Pour pouvoir démarrer les moteurs nous devons refaire les mêmes étapes énoncés dans la partie moteur asynchrone. Puis pour choisir le couplage nous avons la variable « GEAR » qui est la variable pour avoir le couplage linéaire et nous avons la variable « CAM » qui est pour la couplage CAM. Nous avons 2 entrée numériques qui sont « NUM » et « DEN » qui permettent de rentrer 2 valeurs une au numérateur et l’autre au dénominateur pour calculé un rapport de transformation. Puis pour prendre en compte les nouveaux réglages fait nous avons la variable « UPDATE ».
Servomoteurs
Nous allons étudié un dernier type de moteurs. Ces moteurs sont des servomoteurs. Un servomoteur est un système produisant un mouvement grâce à une commande externe. Pour cette partie nous allons nous aidés des blocs de la partie précédentes. Nous gardons les mêmes variables, les seuls qui changent sont les variables encadrées en rouge.
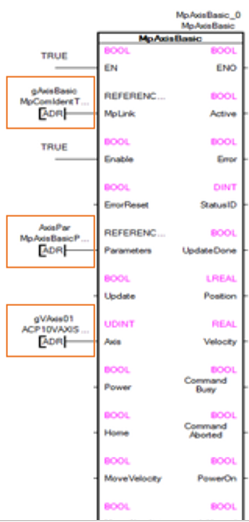
Le bloc nommé « MpAxisBasic_0 » permet de contrôlé l’axe maître. Celui-ci sera un axe virtuel contrairement à la partie précédente où nous avons un axe maître réel. La première variable nommée « gAxisBasic » permet de contrôlé les différentes commandes de l’axe. La seconde variable « AxisPar » permet de contrôlé les différents réglages concernant le moteur. Pour la dernière variable « gVAxis01 », celle-ci permet d’identifiée l’axe que nous allons contrôler. Pour cette variable nous allons utilisé l’axe virtuel. Nous avons 2 autres blocs nommé « MpAxisBasic_1 et MpAxisBasic_2 », qui sont similaire au bloc ci-dessus mais permettent de contrôler les axes réels des servomoteur 1 et servomoteur 2.
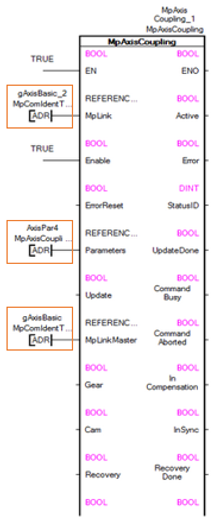
Le bloc ci-dessus nommé « MpAxisCoupling_1 » nous permet de faire le couplage entre deux axes. Nous avons la première variable « gAxisBasic_2 » cette variable représente l’axe esclave d’un des moteurs. La second variable « AxisPar4 » celle-ci permet de choisir les réglages de l’axe. La dernière variable « gAxisBasic » représente l’axe maître que va devoir suivre l’axe esclave. Nous avons un second bloc de couplage pour le second servomoteurs ayant les variables différentes mais un fonctionnement similaire.
Pour la partie visualisation nous avons réutilisé IHM de la partie précédente que nous avons amélioré et ajouté les différentes variables nécessaires.
Nous avons ajouté une partie maître pour nous permettre d’allumer et de contrôler l’axe virtuel. Le reste des variables restent les mêmes et les étapes pour allumer les moteurs sont identiques à toutes les parties. Nous avons juste à active la partie maître en premier si nous voulons que les moteurs suivent l’axe virtuel.