
Projet réflecteur solaire automatisé
LUCAS Miguel KIEFFER Maxime NESTELHUT Alexandre
SOMMAIRE
I.Préparation
Contexte et principe
Choix des techniques et du matériel
Montage du réflecteur
Recherche des coordonnées solaires
II.Création du support
Pied et rotation
Cadre et pivotement
Montage final (à compléter)
III.Programmation
Branchements et configuration
Tests des servomoteurs avec des valeurs données
Amélioration à l’aide de la carte SD
Modifications complémentaires
IV.Conclusion et remerciements
I.Préparation
1.Contexte et principe
Dans le cadre d’étude et réalisation du troisième semestre du DUT GEII (Génie Électrique et Informatique Industrielle), un projet nous a été confié par notre professeur référent, M. OULD ABDESLAM Djafar, consistant à étudier la mise en place d’un réflecteur solaire et ainsi dans un deuxième temps le réaliser dans le but de faire converger les rayons du soleil vers un point donné (par exemple une maison pour pouvoir chauffer celle-ci) d’une manière autonome.Ce type de réflecteur n’étant pas commercialisé en France, la conception et la programmation se créera de toutes pièces par notre groupe, et pourra aboutir à une présentation pour des entreprises intéressées et ainsi effectuer une potentielle mise sur le marché.
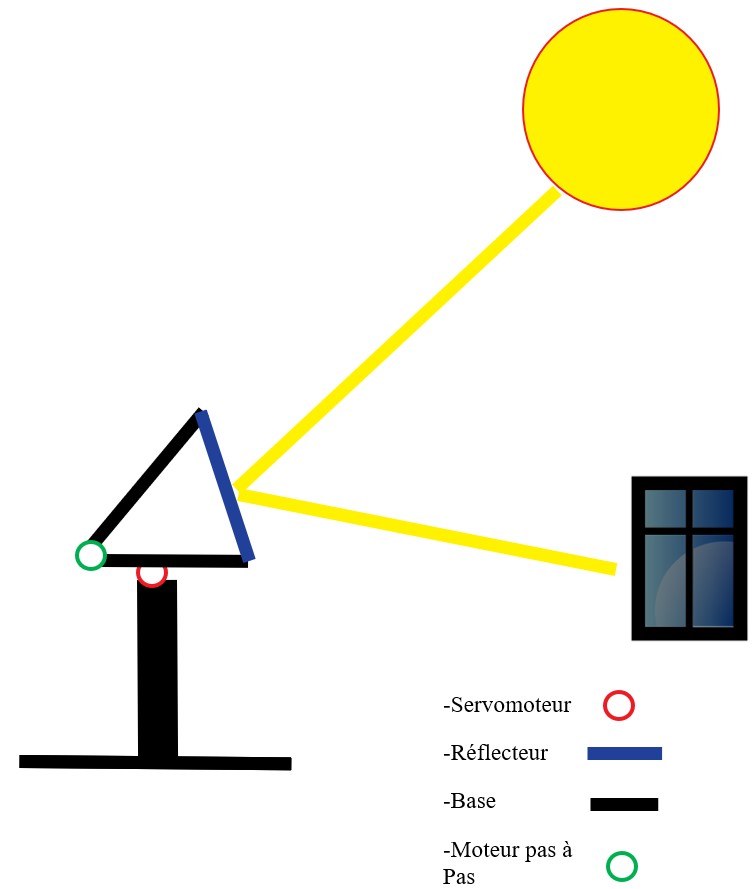
Ce réflecteur est composé d’une base solide afin de maintenir la structure stable en cas d’intempéries ou de temps indésirable. Sur celui-ci seront situés un servomoteur et un moteur pas à pas contrôlés par une carte Arduino permettant d’effectuer les rotations nécessaires, à savoir une horizontalement et l’autre verticalement pour que le miroir fixé à la structure puisse se mouvoir dans plusieurs positions et angles possible nécessaires à réflexion des rayons du soleil, ceux-ci devant incider sur un point précis, en l’occurrence ici les fenêtres du bâtiment afin de le chauffer ou d’améliorer sa luminosité de manière écologique.
2.Choix des techniques et du matériel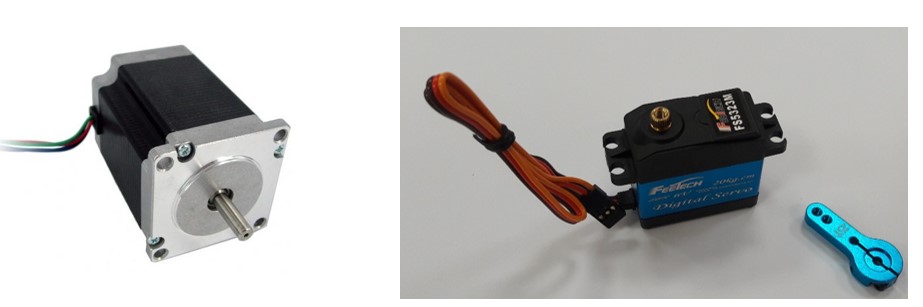
Nous avons utilisé un moteur pas à pas pour sa rotation continue permettant de faire plusieurs tours pour descendre et remonter le panneau, et inversement le servomoteur qui reste bloqué à son dernier angle lorsque l’on coupe l’alimentation pour pouvoir tourner et rester dans l’orientation voulue.

Nous avons utilisé une carte Arduino Uno étant donné que cette dernière est pratique dû à sa simplicité de fonctionnement et sa faible consommation. Pour alimenter le servomoteur ainsi que la carte Arduino, nous avons choisis un adaptateur USB 4 ports étant donné que la puissance délivrée par l’Arduino n’est pas suffisante pour le servomoteur. Une alimentation externe plus puissante est prévue pour le moteur pas à pas.

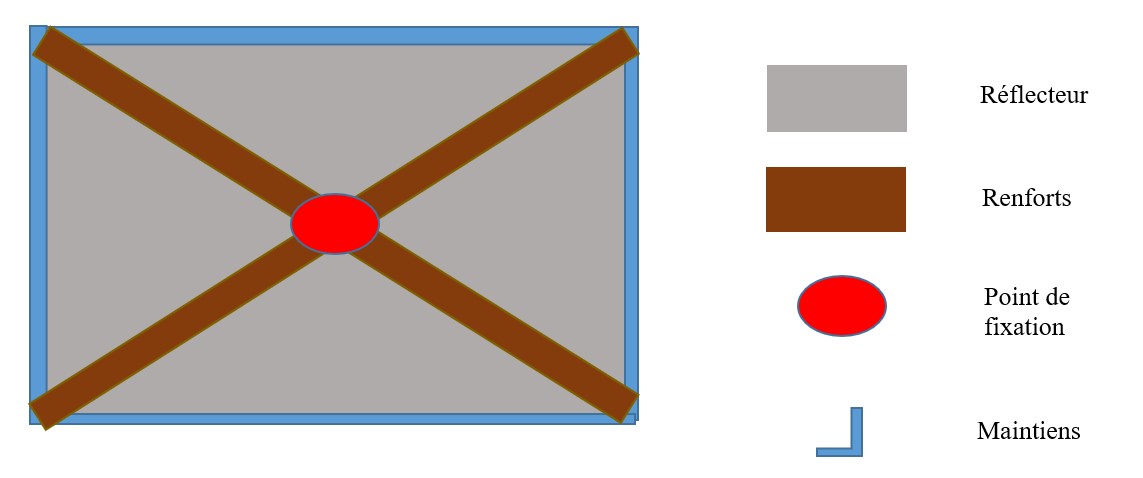
3.Montage du réflecteur solaire
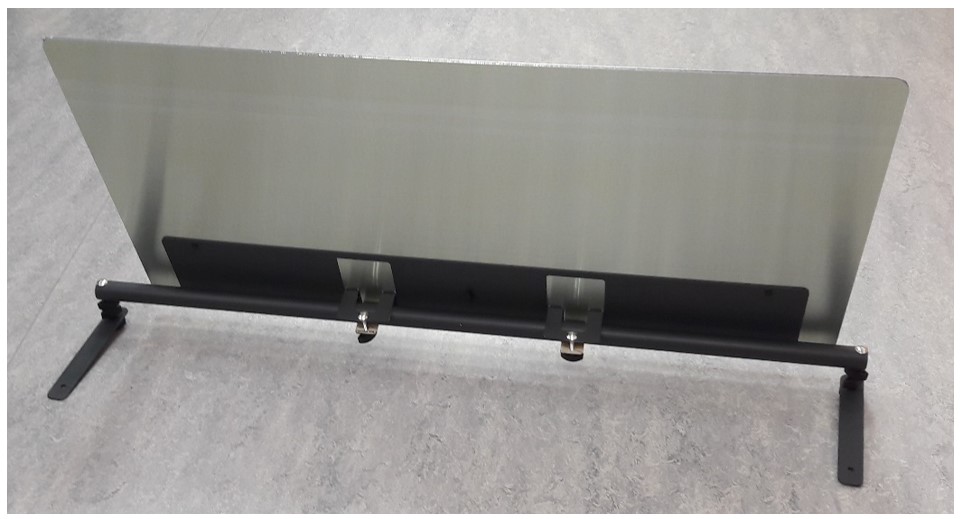
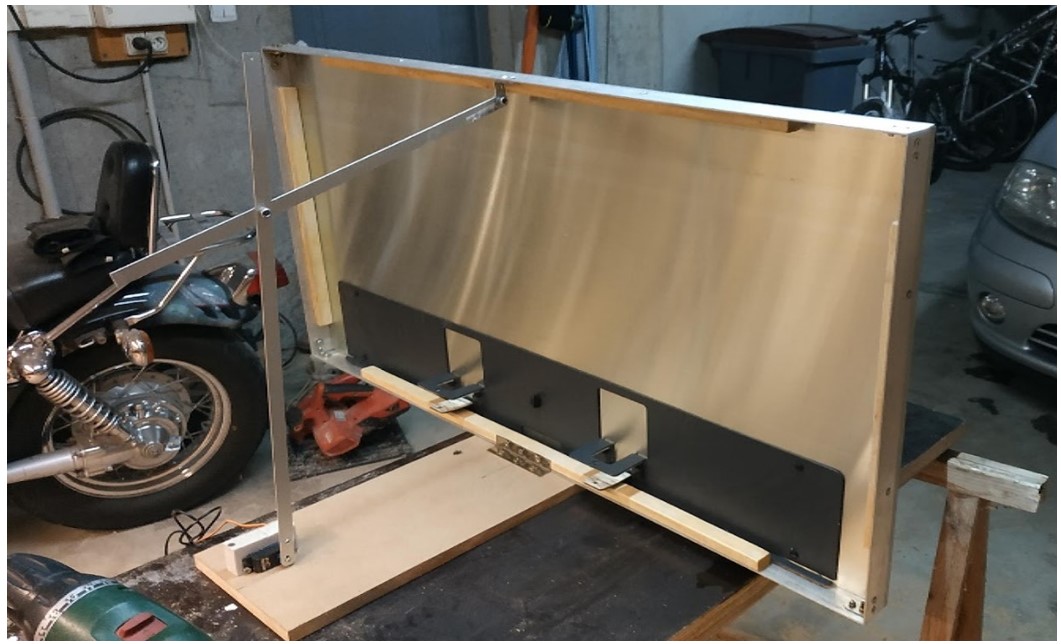
Lors du montage, nous avons constaté que la fixation de base du panneau risquait de subir les aléas de la météo et ainsi fragiliser le réflecteur. Pour régler ce souci, nous avons eu l’idée de renforcer la structure avec des plaques reliées aux coins supérieurs et ainsi de remplacer l’ancien support.
4.Recherches pour les coordonnées solaires
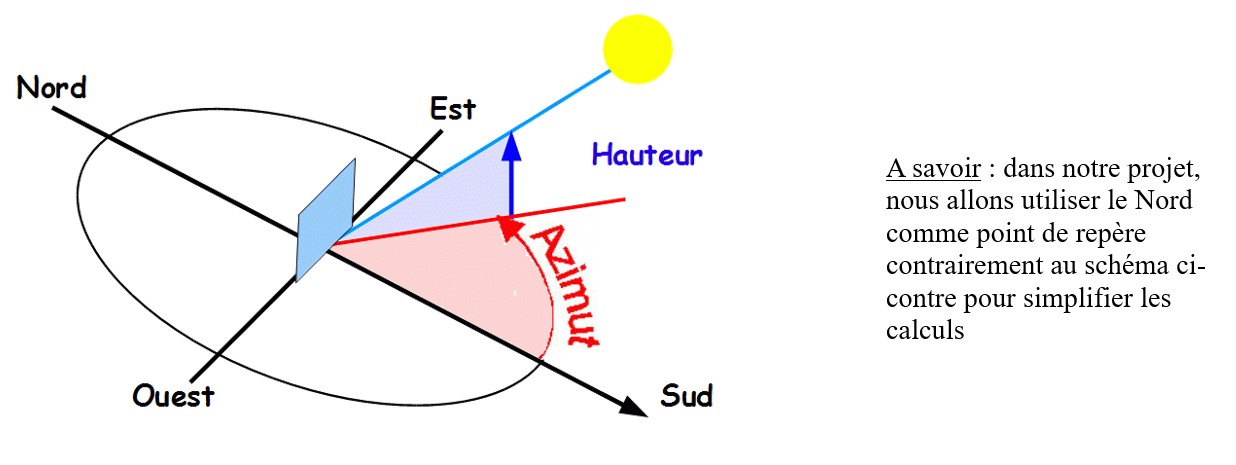
Afin de réaliser notre projet, nous avons dû faire des recherches concernant les positions et trajectoires du soleil pour calculer les angles de rotation des servomoteurs, un par rapport au Zénith du Soleil et un par rapport à l’Azimut.
Azimut et Zénith (ici hauteur) :
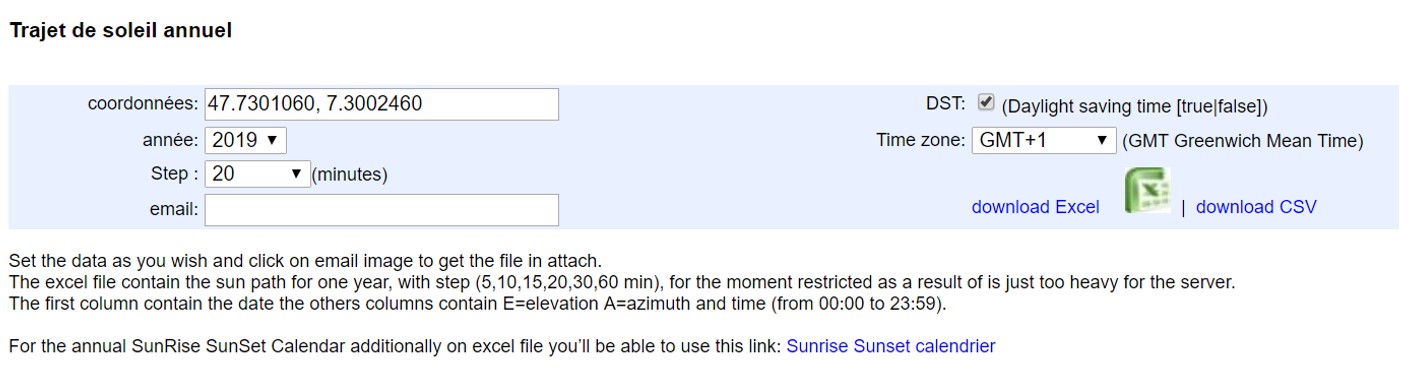
Pour cela, nous avons utilisé de nombreux sites afin de nous renseigner au maximum tels que http://www.solartopo.com ou encore www.sunearthtools.com que nous allons utiliser pour récupérer les données.
Au préalable, nous avons calculé la hauteur (Zénith) grâce à une formule trouvée sur le site www.buzzcasonits.blogspot.com pour vérifier que les valeurs soient cohérentes.

Le meilleur moyen d’avoir les données étant de les récupérer directement sur le site web, nous avons téléchargé le fichier csv pour l’année 2019.
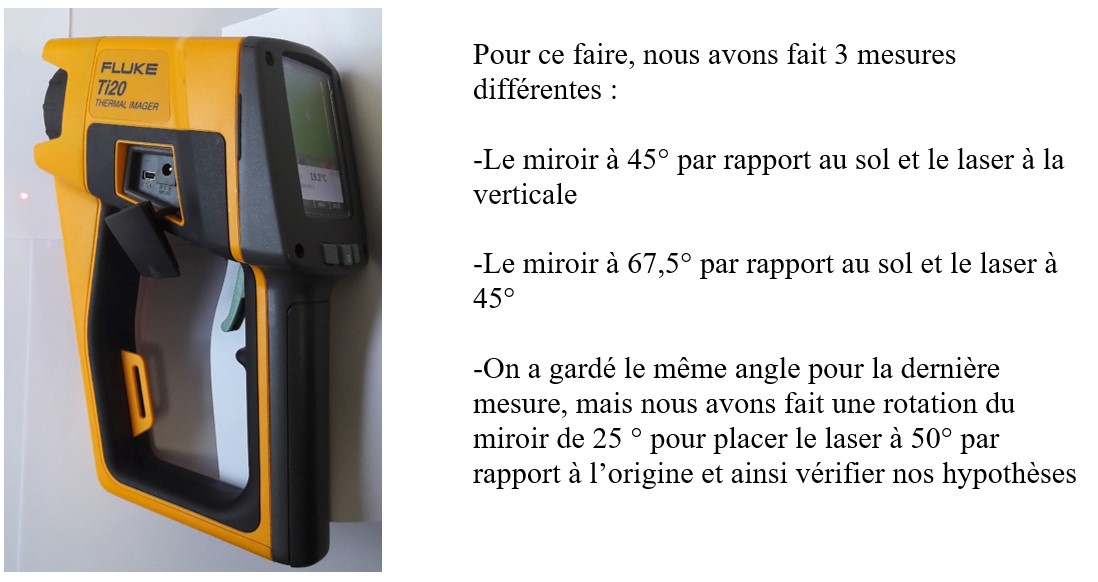
Par la suite nous avons testé nos hypothèses en vrai, grâce à notre réflecteur et à un Fluke Thermal Imager, muni d’un laser.
II. Création du support
1.Pied et rotation
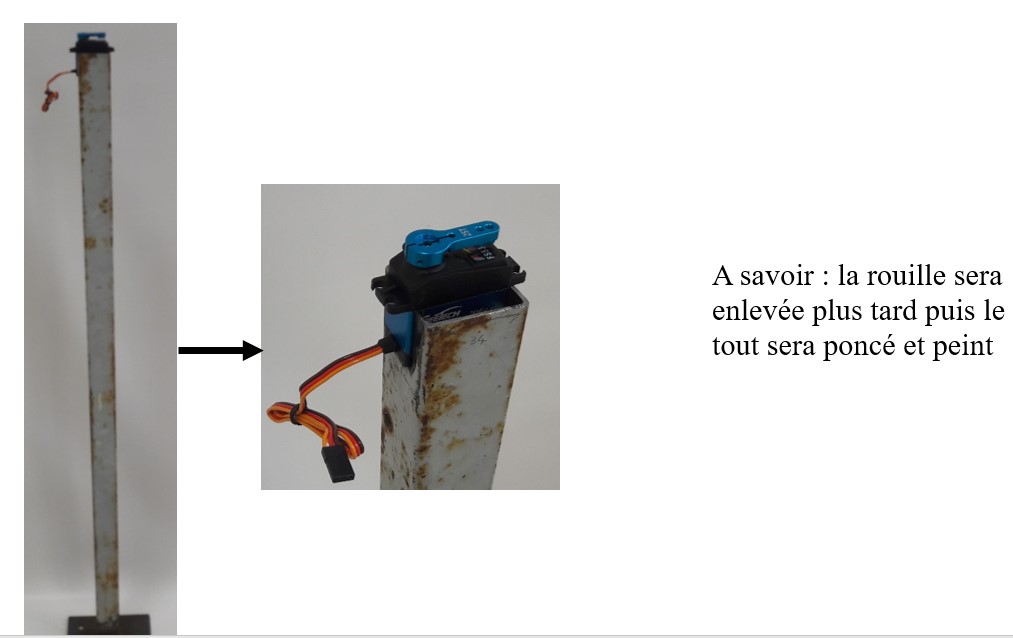
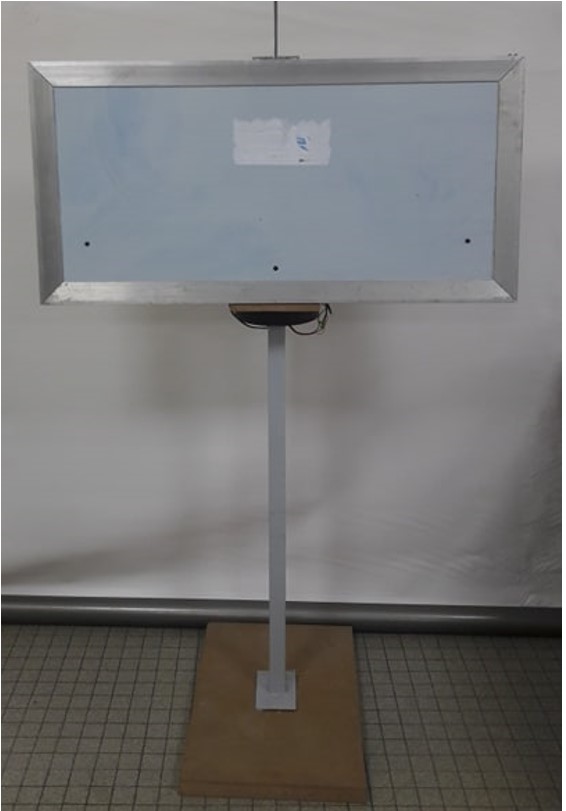
Pour créer le support, nous avons récupéré un bon nombre de pièces. Tout d’abord, pour la base nous avons utilisé un tube rectangulaire muni d’un pied. Nous avons alors mesuré les dimensions du servomoteur puis découper le haut du support aux bonnes dimensions. Pour soutenir le servomoteur, la partie découpée a été pliée. Pour finaliser cette partie nous avons limé les bords afin d’éviter les rayures.
Ensuite nous avons tracé le schéma pour les parties supérieures du support. Nous avons découpé le tout dans du bois (medium). Ce système sera composé de 2 disques en bois, l’un posé sur l’autre grâce à des billes en verre calées dans un rainure afin d’éviter de mettre tout le poids de la partie supérieure sur le servomoteur
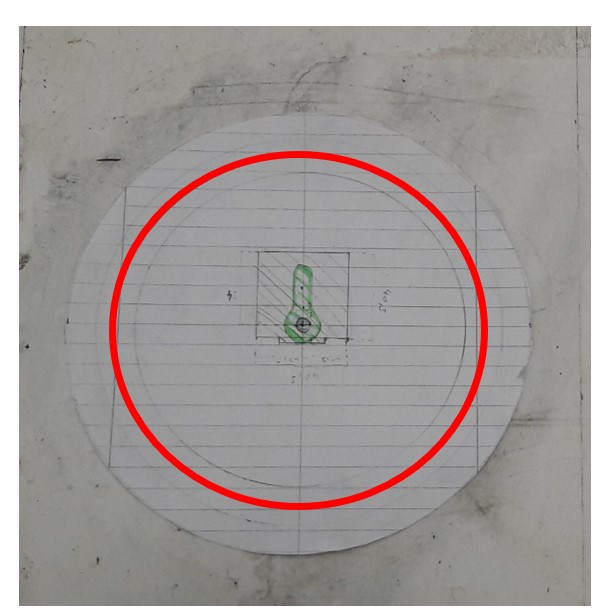
Après avoir tracé le schéma sur papier nous avons fait une modélisation 3D grâce au logiciel de CAO FreeCAD (logiciel libre totalement gratuit) dans le but de les réaliser grâce à la fraiseuse CNC 3 axes à l’IUTlab ; voici les figures représenter en 3D dans le logiciel :
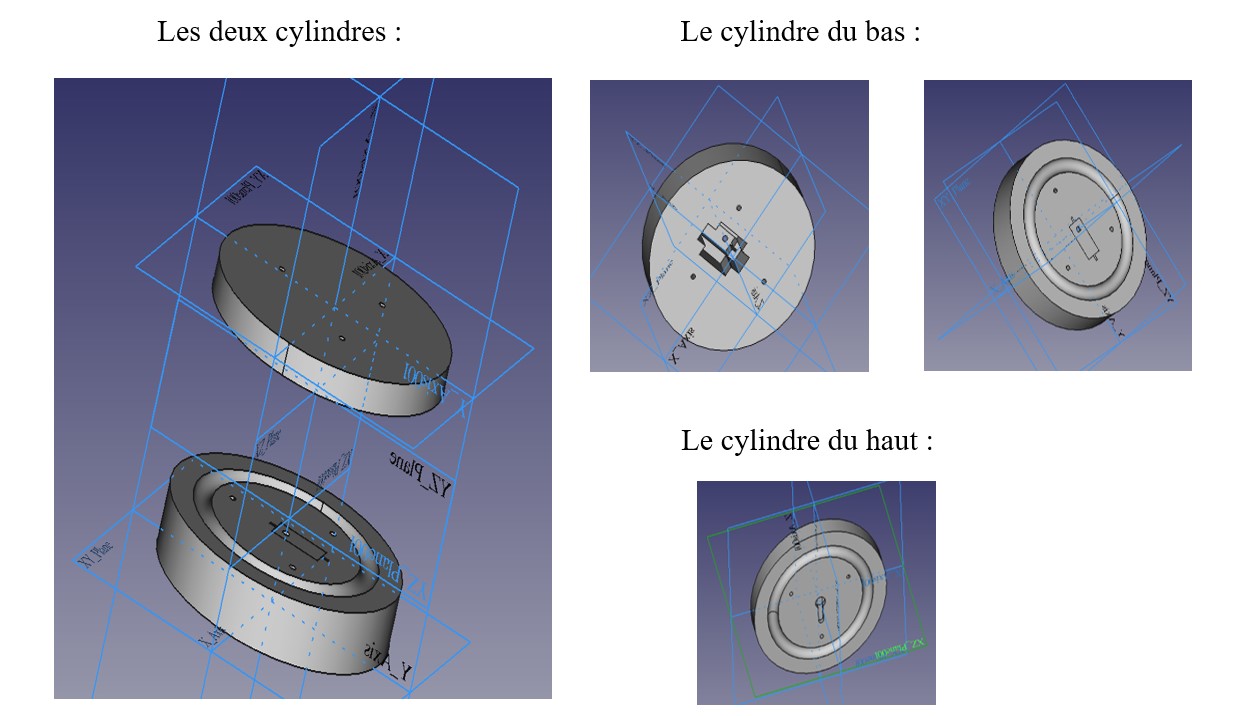
Malheureusement nous n’avons pas pu réaliser les cylindres à la fraiseuse 3 axes ; nous les avons donc faits « à la main » : pour créer le cylindre ainsi que la gouttière nous avons utilisé la fraiseuse manuelle, pour les parties qui durent être creusée nous avons dégrossi le travail grâce à la perceuse à colonne puis affiné aux ciseaux à bois. Voici le résultat :

Pour pouvoir fixer le tout nous avons vissé (temporairement pour avoir un pied stable) une plaque bien plus grande en bois (medium de 5 cm d’épaisseur). Le tout monté donne ce résultat :

2.Cadre et pivotement
Une fois les deux cylindres fixés sur le pied nous sommes passés au second axe qui lui est en deux parties : le support du miroir et l’entraînement du servomoteur :
– le support en miroir est entouré d’un cadre en aluminium qui fait le pourtour du miroir, lui étant coincé entre une barre en bois et le cadre justement pour éviter de devoir le percer

-l’entrainement est fait par le servomoteur qui agit sur deux barres reliées entre elles et au miroir, mais le servomoteur manquant de puissance pour soulever le miroir nous allons devoir améliorer ce mécanisme.
3.Montage final
Après de multiples tests, nous avons constaté que le moteur n’était pas assez puissant pour pouvoir faire remonter le panneau. C’est pourquoi nous avons changé notre deuxième axe en utilisant une tige filetée avec un moteur pas à pas.
Contrairement au servomoteur, le moteur pas à pas va fonctionner en nombre de tours et va faire tourner la tige filetée ce qui va provoquer l’inclinaison du miroir.

Après avoir modifié cet axe, nous avons assemblé les deux parties entre elles grâce à trois vis et deux tiges filetés avec écrous.
III.Programmation
1.Branchements du système
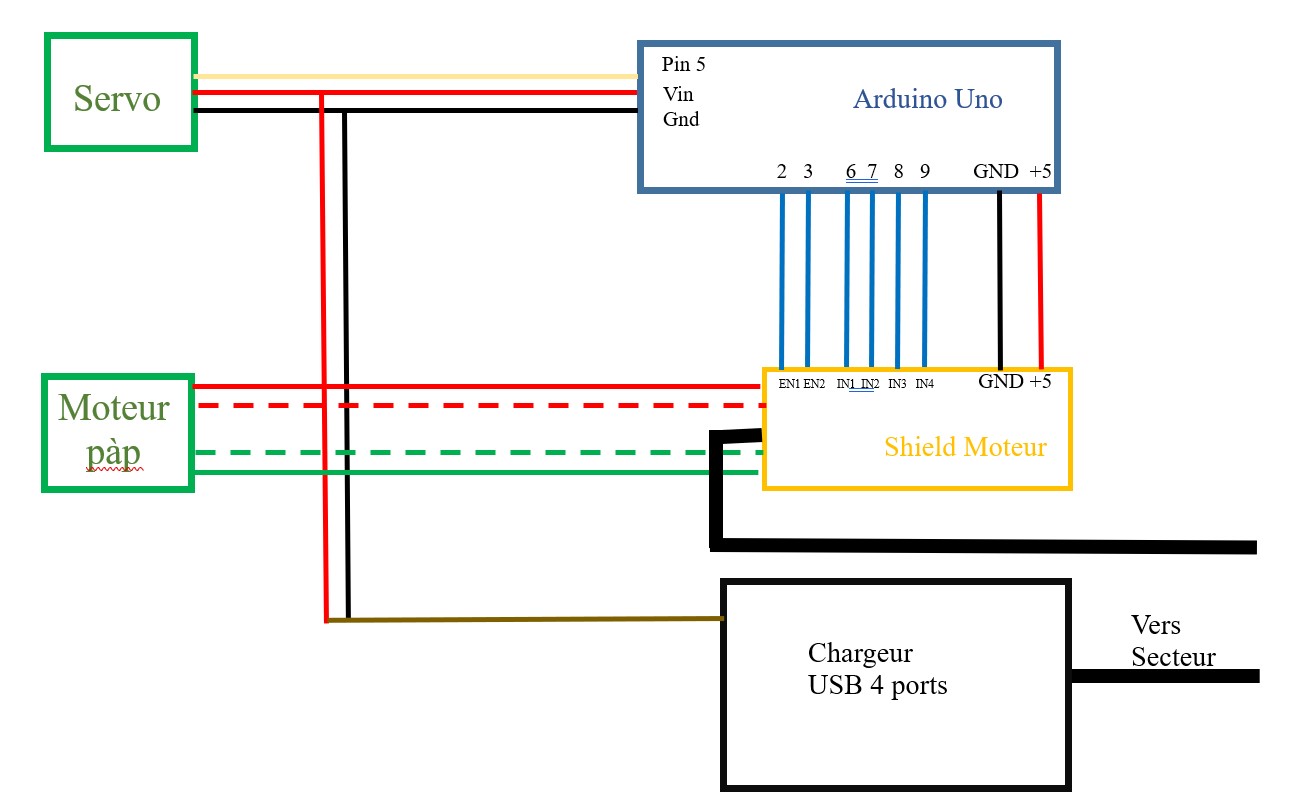
A savoir : l’Arduino est alimentée grâce au port Vin connecté à l’un des servomoteurs directement branché sur le secteur
Configuration carte Arduino Uno
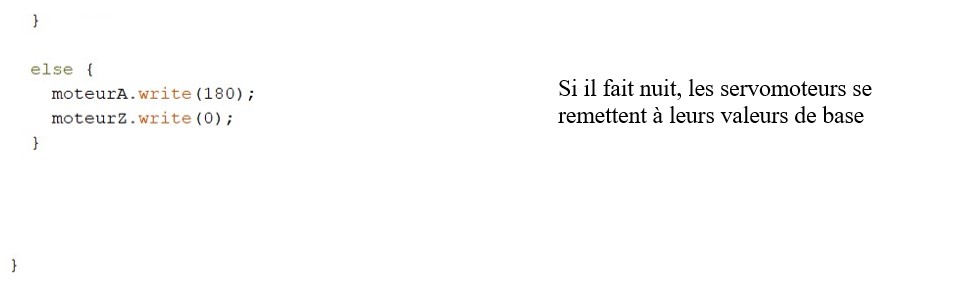
2.Test des servomoteurs avec des valeurs données
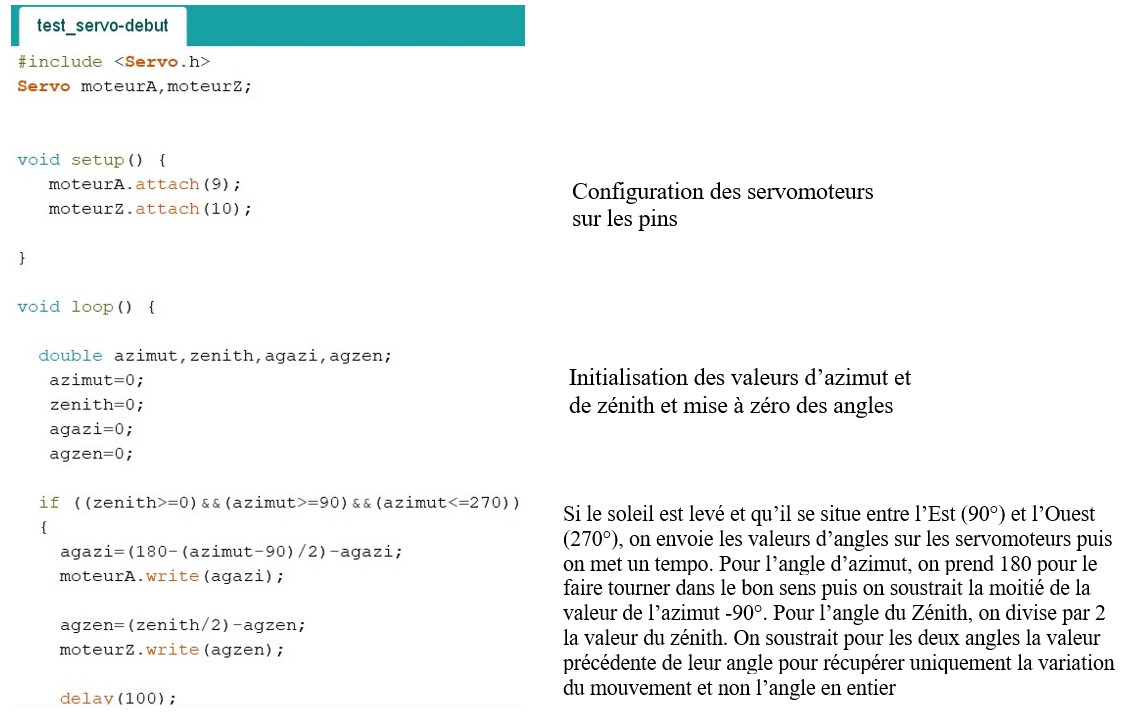
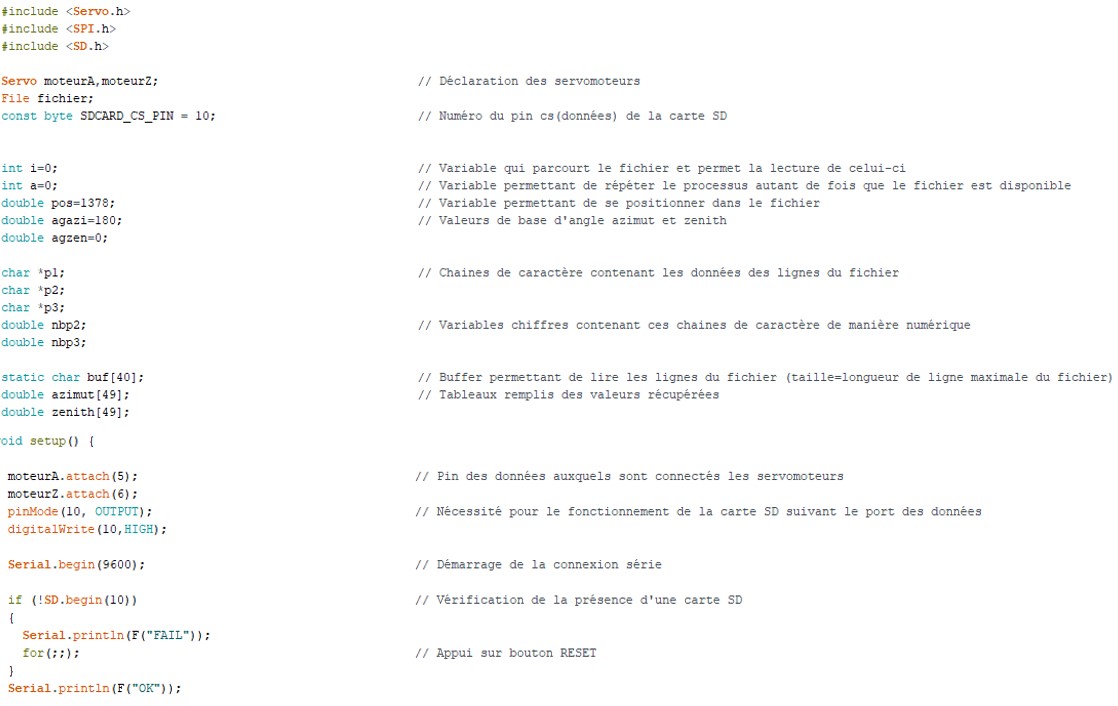
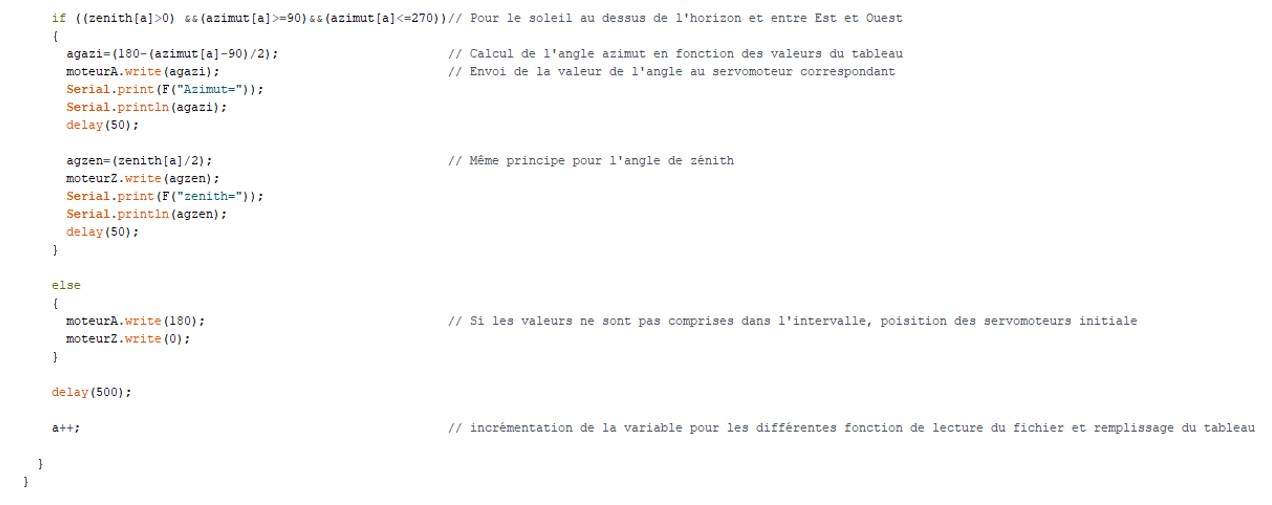
3.Amélioration à l’aide de la carte SD
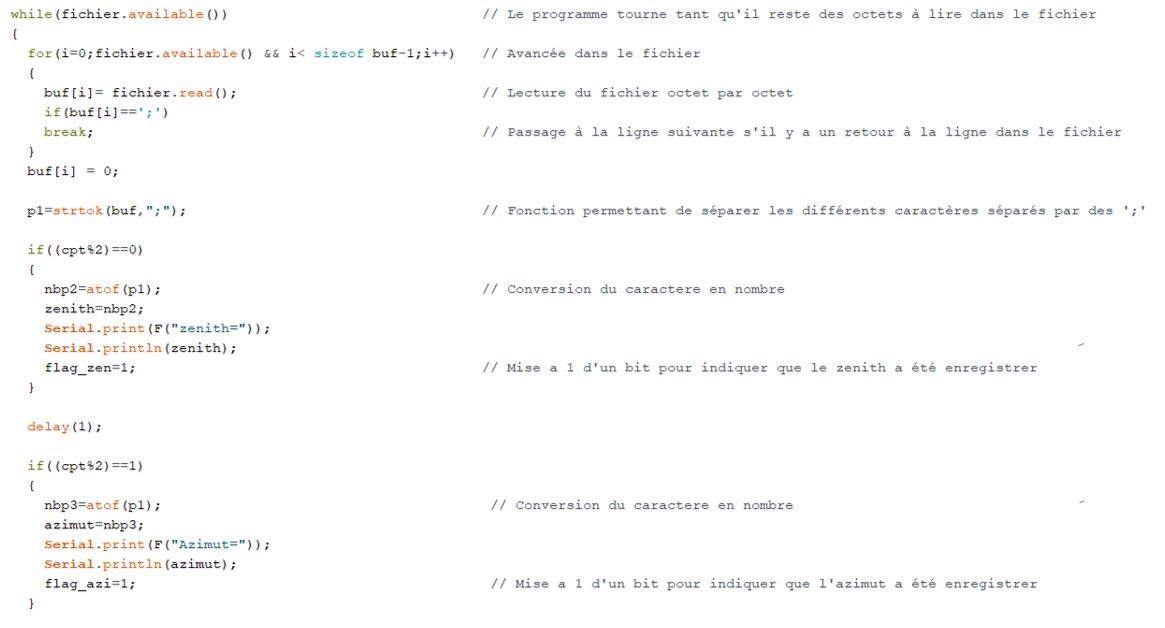
Une fois que les moteurs tournent nous devons cette fois-ci obtenir les valeurs à leur envoyer à partir d’un fichier texte. Pour ce faire nous avons choisi l’option d’utiliser une carte SD car l’accès à celle-ci est plus simple que si nous devions accéder à la mémoire de l’Arduino. Nous avons donc commandé une extension SD pour notre carte Arduino UNO et branché soigneusement sur celle-ci.

4.Modifications complémentaires
Suite à l’avancement du projet, nous avons remarqués que notre programme initial ne convenait plus à nos besoins. Nous avons fait des modifications : une par rapport à la récupération de données et l’autre par rapport à une modification faite dans le montage.
– Modification pour la récupération de données sur un an : Dans ce cas , nous avons remplacé le fichier sur la carte SD par un fichier ayant les valeurs pour toute l’année, puis nous avons modifié le programme car la lecture sur un an n’est pas pareil que celle sur un jour.
-Modification pour le fonctionnement du moteur pas à pas
Dans ce cas, nous avons remplacé notre servomoteur par un moteur pas à pas donc nous avons changé la formule pour ce dernier. Pour cela nous calculons le nombre de pas de que le moteur doit faire pour obtenir le nombre de tours, ce qui diminuera ou augmentera la distance entre le moteur et le bout de la tige filetée et donc incliner le panneau d’un certain angle

IV.Conclusion et remerciements
Nous voulons tout d’abord remercier Mr OULD ABDESLAM Djafar de nous avoir guidé et aidé tout au long du projet. Nous voulons aussi remercier Mr DE SABBATA pour nous avoir donné de nombreux conseils et aussi pour nous avoir autorisé à utiliser l’IUT Lab pour nos besoins. Nous aimerions également remercier Mr WIRA pour son aide concernant la gestion de la carte SD et la lecture du fichier.
Pour conclure, ce projet a été pour nous une expérience importante pour notre cursus car nous avons pu travailler en groupe tout au long de l’année. Nous avons appris à nous partager les tâches, à faire des compromis entre nous pour pouvoir satisfaire au mieux les besoins du projet. De plus cette expérience fut d’autant plus enrichissante car nous avions un projet concret avec une réalisation à la clé qui s’est concrétisée.
Nous pouvons également ajouter à ce projet divers points d’amélioration, que ce soit remplacer les pièces en bois par de l’aluminium pour augmenter sa robustesse, un anémomètre permettant de coucher le panneau en cas de vent fort détecté, une cale pour éviter le redressement quelque peu brusque du retour en position initiale du panneau. Un capteur serait également à prévoir sous le miroir pour l’éviter de descendre trop loin et causer des dégâts.