

Projet: Vélo à smoothie
Ce projet a été demandé par Mme KOHLER pour être utilisé lors d’événements organisés par l’UHA, il a été encadré par Mr BAZEILLE et Mr WIRA qui étaient là pendant les heures banalisées sur l’emploi du temps pour qu’ils puissent nous venir en aide. Le groupe est constitué de:

RINCK Adrien , LIEB Achille , HERTZOG Alex , HADRICH Nathan

Ce projet a pour but de recharger un smartphone et de faire des smoothies à l’aide d’un vélo d’appartement que l’IUT nous a fourni, nous avons dû réaliser, assembler et construire le système pour réaliser la tâche qui nous a été demandé.
Nous allons vous présenter le sommaire :
1. Nos motivations
- Pourquoi ce projet ?
2. Etude
- Bête à cornes
- Diagramme pieuvre
- Préparation
3. Réalisation
- Partie mécanique
- Partie électrique
- Partie informatique
4. Fin du projet
- Comparaison
- Divers
- Conclusion
- Remerciements
1. Nos motivation
Nous avons choisi ce projet dû au faite de son côté ludique et divertissant, ce projet nous est apparu comme original par sa mixité quant au domaine que celui-ci requiert pour le mener à bien. Il allie mécanique, électrique et informatique en même temps ce qui permet de ne pas retrouver des tâches répétitives, mais aussi que chacune des personnes composants le groupe trouve le domaine qui lui convient le plus pour travailler dessus. Ce projet par sa mixité et sa difficulté nous oblige à acquérir de nouvelles compétence en plus de celles abordées en cours. Ce qui nous a aussi attirés est que ce projet permet de rendre le DUT GEII plus attractif, car ce vélo sera présent lors d’événements extérieurs à l’enceinte de l’IUT.
2. Etude
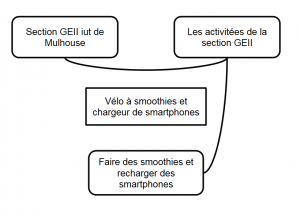
- Bête à cornes
Ci dessous vous pouvez voir la bête à corne avec notre projet qui est le vélo à smoothies et chargeur de smartphone. On peut voir qu’il agit sur la section GEII comme lors de salon pour promouvoir celle-ci, il rend service à l’IUT de mulhouse et au GEII puisqu’il lui donne de la visibilité, et le but principal est de réaliser des smoothie et de recharger des smartphones.
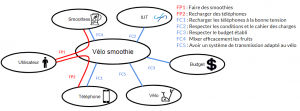
- Diagramme pieuvre
Le diagramme pieuvre nous permet de visualiser les fonctions principales du projet, qui sont la recharge d’un téléphone portable et la réalisation de smoothie, par le biais de l’utilisateur.
Plusieurs contraintes sont à prendre en compte, l’IUT tout d’abord de part le cahier des charges imposé, ensuite le budget qui était plafonné, également la transmission sur le vélo pour envoyer le mouvement de la roue à l’hélice du Blender qui devra mixer efficacement les fruits, et enfin, le smartphone car il ne peut pas recevoir n’importe quelle tension ni n’importe quelle intensité, ici, on enverra du 5V continu.
- Préparation
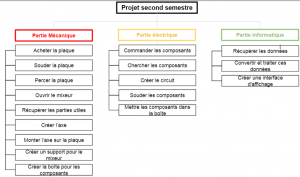
En amont de la réalisation du projet nous avons fait une mindmap pour nous permettre de bien structurer le déroulement de celui-ci, par le biais de cette mindmap nous avons pu tirer trois grandes parties centrales pour notre projet: Une partie mécanique qui comprend toute la partie “faire des smoothies” , une partie électrique qui est constituée de “la recharge de smartphone”, et une partie informatique qui englobe tout ce qui est “interface” pour les données reçues de la part du système électrique.
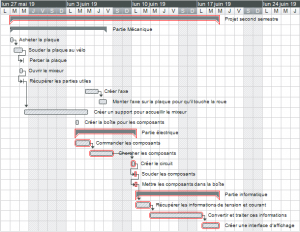
De la mindmap nous avons pu extraire un diagramme de GANTT qui nous permet de visualiser le temps que prendra le projet en fonction des étapes de réalisation des différentes parties présentent dans le projet, car certaines de ces étapes dépendent l’une de l’autre donc tant que l’étape n’est pas fini nous ne pouvons pas passer à la suivante c’est pour cela que la visualisation temporelle du diagramme de GANTT nous permet de nous rendre compte si nous arriverons à finir à temps ou si nous dépasserons la date limite.
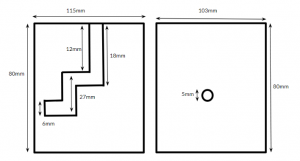
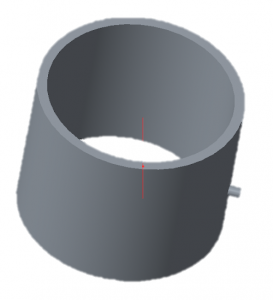
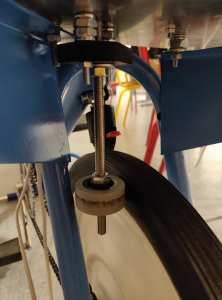
Afin de pouvoir activer ou désactiver le blender à smoothie, pour éviter un fonctionnement continu et pouvoir détacher le mixeur pour remplir ou nettoyer le récipient, il était essentiel de mettre au point un système d’embrayage. Pour faire au plus simple et allier le support du blender avec ce système d’embrayage, nous avons imaginés un système de deux pièces emboîtables à modéliser en trois dimensions puis à imprimer à l’aide d’une imprimante 3D. Voici les plans et les dimensions des deux pièces du système.
Nous avons également étudiés le rapport de réduction sur le vélo d’appartement entre le pignon et le plateau, ce qui nous a permis de relier la vitesse de rotation en entrée avec la vitesse de rotation en sortie.
3. Réalisation
- Partie mécanique
Voici la partie mécanique: Nous voulions au départ concevoir un support pour contenir tout le matériel mais il nous était impossible de le souder directement sur le vélo car les deux matériaux n’était pas compatible, nous avons procédé alors à la soudure de pattes sur le cadre permettant d’accueillir la plaque en aluminium en la vissant dessus.



Par la suite on a modélisé le système de débrayage en trois dimension à l’aide du logiciel Créo, on l’as ensuite imprimé en trois dimensions plastique mais le premier essai n’étant pas concluant nous avons décidé de l’imprimer à l’aide d’une imprimante à résine car plus résistant, puis de peindre les pièces ainsi que le vélo aux couleurs de l’UHA qui nous sont imposé.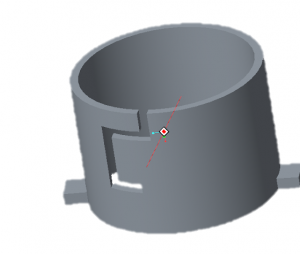
Les couleurs sont un Bleu cyan, un Bleu foncé et du blanc.


- Partie électrique
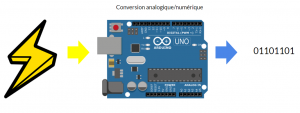
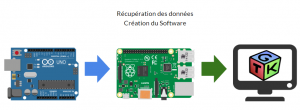
Cette partie à pour but de modifier le signal électrique délivré par la dynamo afin qu’il soit compatible avec la recharge d’un smartphone actuel. Pour cela il va falloir redresser, lisser, réguler le signal et limiter sa tension à 5V en sortie. Voici le schéma électrique du montage, ainsi que des photos du montage final à droite. Dans le but de récupérer des données comme la tension et le courant dans la charge nous avons placé un ampèremètre et un voltmètre sur le montage, les informations seront recueillies par l’arduino. L’arduino servant de convertisseur analogique/numérique, transmet les données vers le raspberry pi qui l’affiche à son tour sur un écran de supervision. L’utilisation d’une batterie externe permet d’alimenter le raspberry en continu, et le raspberry alimente ensuite l’arduino.
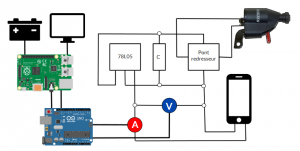
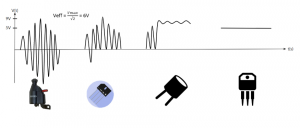
Nous a llons voir, au sein du circuit électrique comment la tension évolue à travers les composants. En premier lieu, la dynamo nous délivre une tension alternative sinusoïdale de 6V efficace, qui est un brut inutilisable pour nos téléphones fonctionnant en courant continu. La tension alternative passe dans un pont redresseur, qui a pour but de redresser les alternances négatives, elle passe ensuite dans un condensateur de 1000µF qui le lissera comme ci-dessous. La tension passera finalement par un régulateur 78L05, qui aura en sortie une tension de 5V, ce qui est légèrement plus bas que notre tension d’entrée, mais le courant est suffisamment continu pour être compatible avec un smartphone.
- Partie informatique
A l’aide d’un Arduino, nous avons récupéré directement la tension sur un port analogique (car celle ci est inférieur à 5V). Le courant quant à lui sera récupéré via un capteur à effet hall qui convertit le courant en tension qui sera, elle, récupérable sur les port analogique de l’Arduino.

Il ne reste plus qu’à envoyer les informations numérique au raspi pour affichage
- Utilisation de la bibliothèque wiring pi pour récupérer les infos des pins et GTK+ pour le GUI
Déclaration
Récupération de la tension par le Pin WiringPi 29

Récupération du courant sur le Pin WiringPi 28

Calcul de la puissance
![]()
Création de l’interface graphique
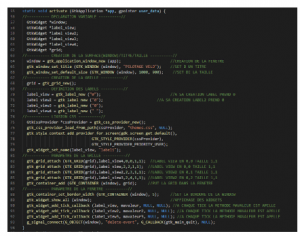
Main
![]()
4. Fin du projet
- Comparaison
Pour pouvoir comparer notre système avec le blender d’origine, nous avons à l’aide du diamètre et du périmètre de chaque roues calculés les vitesses de rotation de chacunes en fonction d’une vitesse de pédalage donnée. Nous pouvons ainsi constater en comparant notre vitesse de rotation de la roue entraînant l’axe du blender qu’elle est inférieur à la vitesse de rotation moyenne d’un blender à moteur électrique. Pour compenser cette différence d’environ 2000tr/min, le temps de mixage doit être allongé pour assurer un mélange homogène.
 Petite roue
Petite roue
(menée)
D1 = 4 cm
P1 = 12.56 cm
avec P = 2πr P = périmètre (cm)
r = rayon (cm)
 Grande roue
Grande roue
(menante)
D2 = 34 cm
P2 = 106.81 cm
Rapport = P2 / P1 = 8,5
Vitesse de rotation moyenne d’un Blender = 10 000 tr/min
|
Vitesse ( km/h ) |
Vitesse de rotation petite roue ( tr/min ) |
Vitesse de rotation grande roue ( tr/min ) |
| 10 | 1317 | 155 |
| 20 | 2580 | 310 |
| 30 | 3570 | 465 |
| 40 | 4560 | 620 |
| 50 | 6583 | 775 |
| 60 | 7900 | 930 |
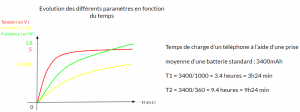
Evolution des différents paramètres en fonction du temps
- Divers
Durant toute la durée du projet nous avons sans cesse améliorer le vélo de différente manière pour le rendre plus attractif, le rendre plus simple d’utilisation, en créant une interface avec des informations sur la tension et le courant que produit le vélo, nous avons aussi créés des pièces trois dimension pour un système d’embrayage du mixeur sur le vélo. La seule partie du vélo qui est restée au cours du temps est le corps et le système de transmission, sinon tout le reste a subi différentes modifications pour aller dans la continuité de la réalisation du projet.





- Conclusion
Afin de mener ce projet à terme, nous pouvons en dire que c’était un projet intéressant qui traite plusieurs parties différentes qui nous a permis d’apprendre de nouvelles compétences.Vu la compléxité du projet nous sommes restés pour faire des heures supplémentaires de travail sur le vélo sinon nous aurions jamais fini a temps. Chaque membre du groupe à réussi à trouver sa place et à amener ses compétences personnelles. Cela nous a aussi permis de renforcer notre cohésion de groupe et notre organisation pour mener à bien le projet.
- Remerciements
Nous tenons à remercier nos professeurs encadrants, Mr Bazeille et Mr Wira ainsi que Mr Colliccio , Mr De Sabbata et Mr Xu pour leur aide tout au long du projet qui ont permis de mener à bien nos travaux.
Liste du matériel utilisé:
Mécanique:
- Vélo d’appartement
- Peinture
- Support en aluminium
- Support pour guidon
- Planche à découper
- Blender
- Tige filleté
- Roulement à billes
- Roue d’entraînement
- Système d’embrayage en résine
- Cale de maintient pour roulement
Electrique:
- Dynamo
- Câbles
- Port USB
- Batterie externe
- Condensateur EEUFC1V102
- Régulateur L7805ACV
- Pont redresseur KBP10G
- Capteur de courant ACS712 5A
Informatique:
- Arduino uno rev3
- Raspberry Pi3 model B
- Ecran de supervision Raspberry Pi Touch Display
- Logiciel arduino
Voici un aperçu du vélo avant et après modification.

