

Projet robot de sécurité

Sommaire :
Introduction
Membres du projet
Présentation du sujet
Problématiques
Gestion de projet
- Bête à cornes
- MindMap
- Pieuvre
- Planification (Gantt/Timeline)
- Délais
- Budget de départ
- Liste des achats
Réalisation du projet
Bilan
Perspectives d’évolution
Bibliographie
Remerciements
Introduction
Dans le cadre des projets d’étude et réalisation du DUT Génie Electrique et Informatique Industrielle, nous nous sommes vu confiés un volume de 60 h dédiées à un projet précis : La conception d’un robot de sécurité. Ce projet a duré pendant la quasi totalité du semestre deux, c’est-à-dire de mars à juin.
Le choix de l’équipe et du projet a été effectué en fonction de nos affinités et de nos préférences. Durant la totalité du projet, deux professeurs nous ont encadré : M. Hueber et M. Choisy. Au delà des 60 h attribuées au projet, il nous a fallut travailler en complément afin de respecter le cahier des charges prévu.
Membres du projet
Pour ce projet nous devions être un maximum de 4 étudiants avec pour seul critère d’être dans le même groupe de TP.
Raphaël Jiménez Quentin Dijoux


Quentin Ingweiller Arthur Gasser



Présentation du sujet
Nous avons commencé notre projet par un déplacement au Lycée Professionnel Charles de Gaulle de Pulversheim pour aller à la rencontre de lycéen en CAP Agent de sécurité afin de leur présenter le projet et de recueillir leurs connaissances sur le monde de la sécurité.
L’objectif principal de notre projet est comme dit précédemment, de concevoir un robot de sécurité. Celui-ci aura pour but d’assister l’agent de sécurité dans son travail en effectuant des rondes de levé de doutes. Lors de ces rondes, le Robotino prélèvera à des points précis, des informations sur son environnement (température, gaz, détection de flamme) qui seront envoyée à l’agent qui pourra ensuite agir en conséquence.
Le robot devra respecter les normes de sécurité de l’entreprise dans laquelle il évolue. Il n’a pas pour prétention de remplacer l’agent de sécurité mais de lui prêter assistance.
« Le danger dans le passé était que les hommes deviennent des esclaves. Le danger dans le futur est qu’il deviennent des robots. »
Erich Fromm
Problématiques
- Comment programmer efficacement le robot ? (faire en sorte qu’il soit autonome et intelligent)

- Quels capteurs ajouter au robot ? Et comment ?
- Comment envoyer les données à l’agent de sécurité ?
Gestion du projet
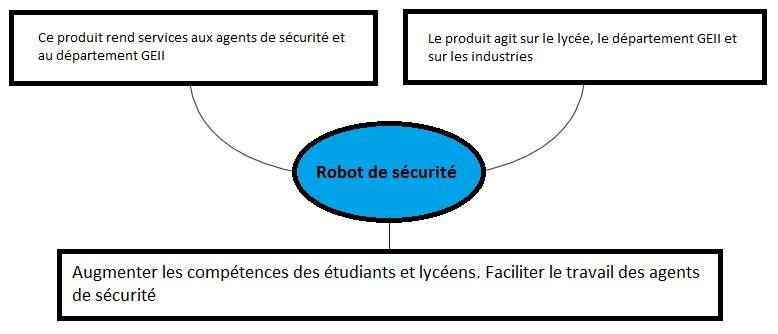
1. Bête à cornes
Pour délimiter notre projet, il a fallut dans un premier temps définir ce a quoi il sert et à qui il sert. C’est ici qu’intervient le diagramme dit « de la bête à cornes ».
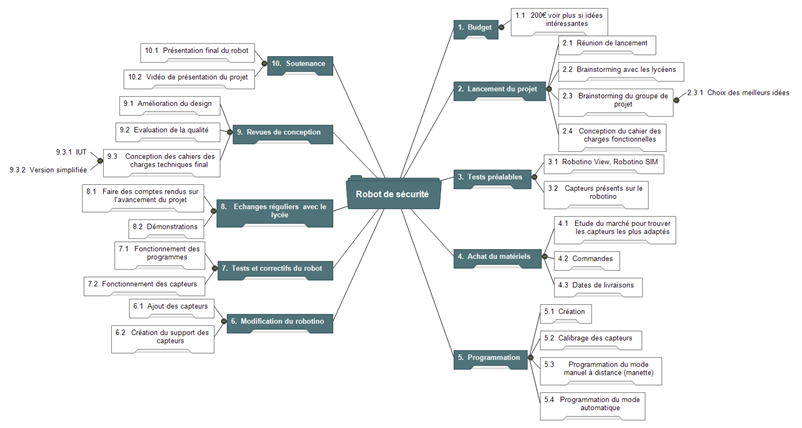
2. MindMap
Ce MindMap décrit les différents points de réalisation du projet.
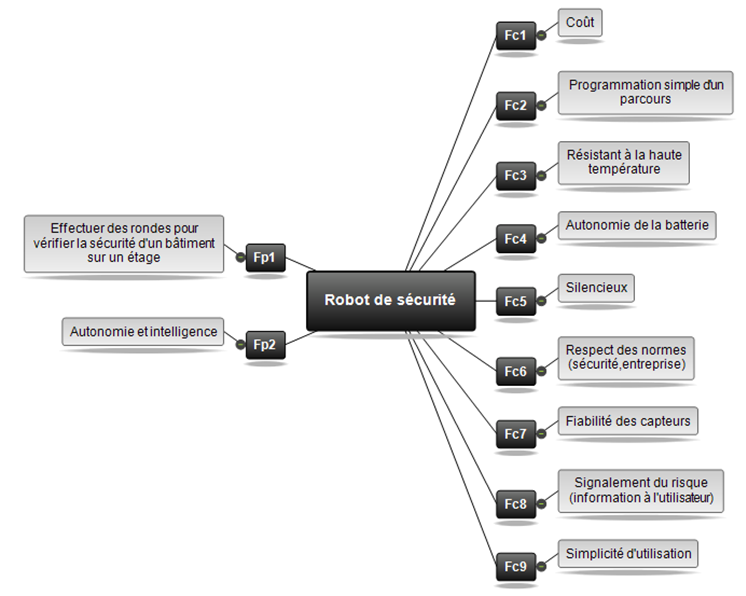
3. Pieuvre
Ce diagramme dit « de la pieuvre » permet de décrire les différentes fonctionnalités (gauche) et contraintes (droite) du robot.
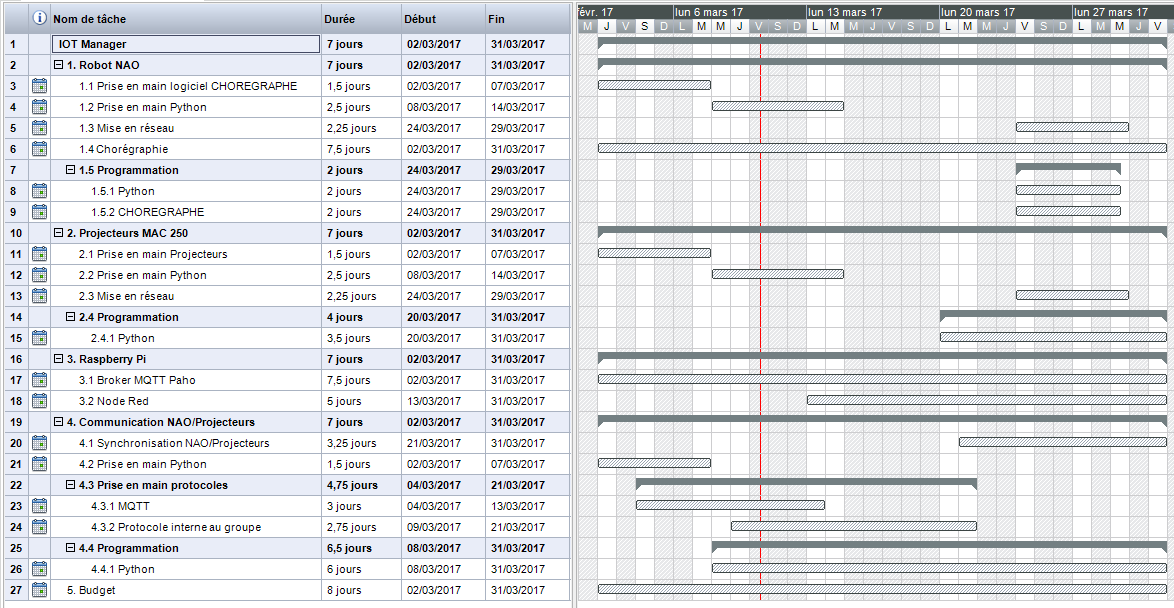
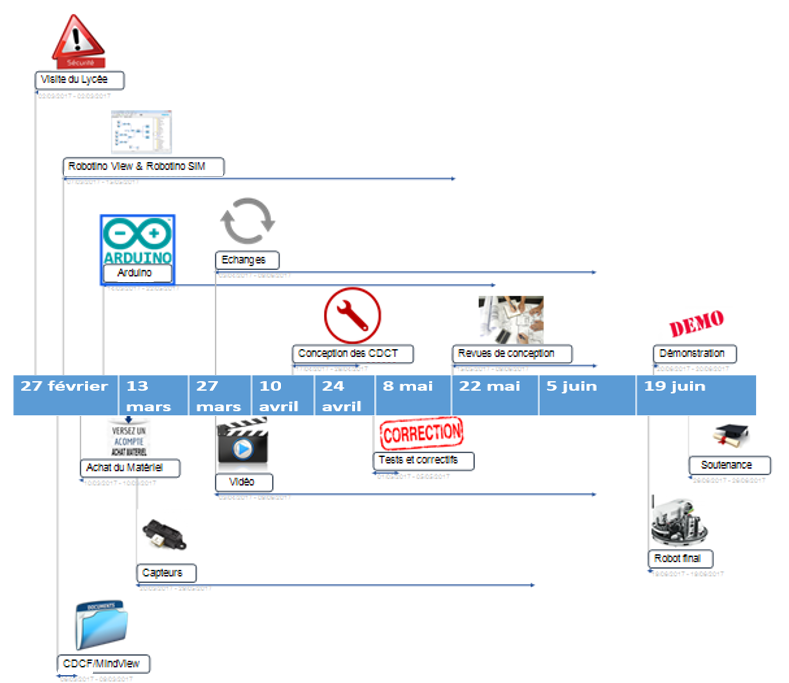
4. Planification (Gantt/Timeline)
Voici deux vues de l’organisation dans le temps du projet. En premier, une vue type Gantt détaillée et en second une timeline en version simplifiée.
5. Délais
- La commande d’un produit en conception comporte évidemment des délais de réalisation. Pour notre projet, c’est le même principe, les jalons positionnés par nos professeurs encadrant était d’achever notre œuvre avant la fin de l’année. Plus précisément, avant une soutenance le 22 juin dans laquelle une présentation de notre projet est attendu.

- Une seconde échéance nous a été proposé en mi-projet (la réalisation a du attendre le mois de juin). Elle consiste en une démonstration auprès des lycéens avec lesquels nous travaillons. Cette démonstration nous a également permis d’effectuer des essais et des tests en situation réelle des capteurs de notre robot.
6. Budget de Départ
Notre Budget initial est de 200 euros mais il peut-être sujet à des extensions si jamais le projet parait intéressant et le nécessite absolument.
7. Liste des achats
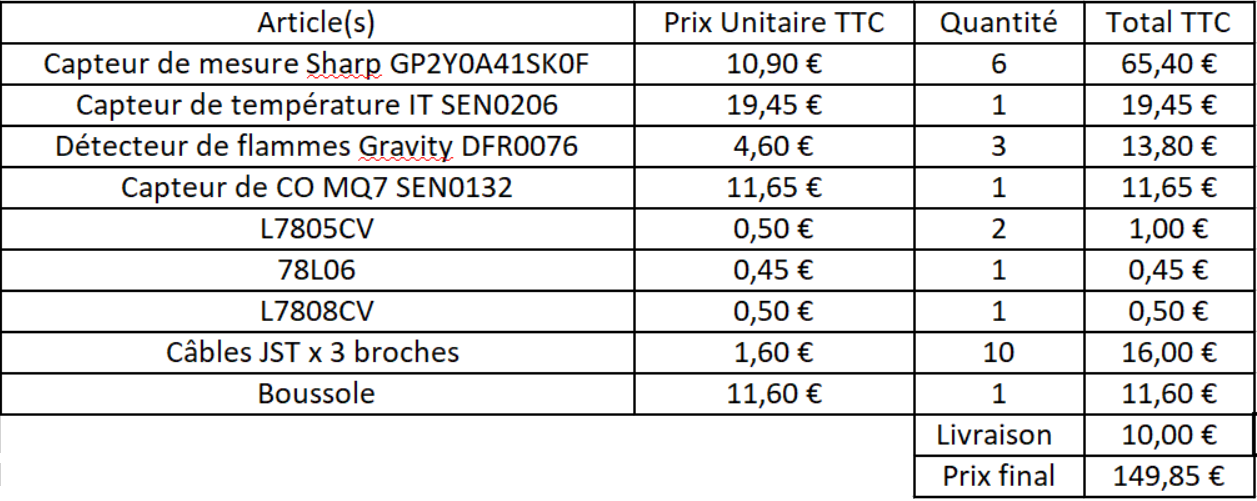
Comme nous pouvons le voir sur ce tableau nous avons acheté 11 capteurs pour la navigation et la prise d’informations du robot. La carte Arduino nous étant fournie, nous n’avons pas eut à en acheter.
Réalisation du projet
1. Base Robotino
Comme dit précédemment, nous nous sommes basés sur un Robotino. Le Robotino est très complet, en effet il dispose de capteurs, de batteries, de moteurs et d’une caméra dans sa version d’origine. Il existe également un logiciel ainsi qu’une simulation qui sont spécifiques à la programmation de ce robot (voir suite du document). La connexion entre le robot et le PC est très pratique car elle se fait par Wifi. Le Robotino de base vaut environ 7000 €.
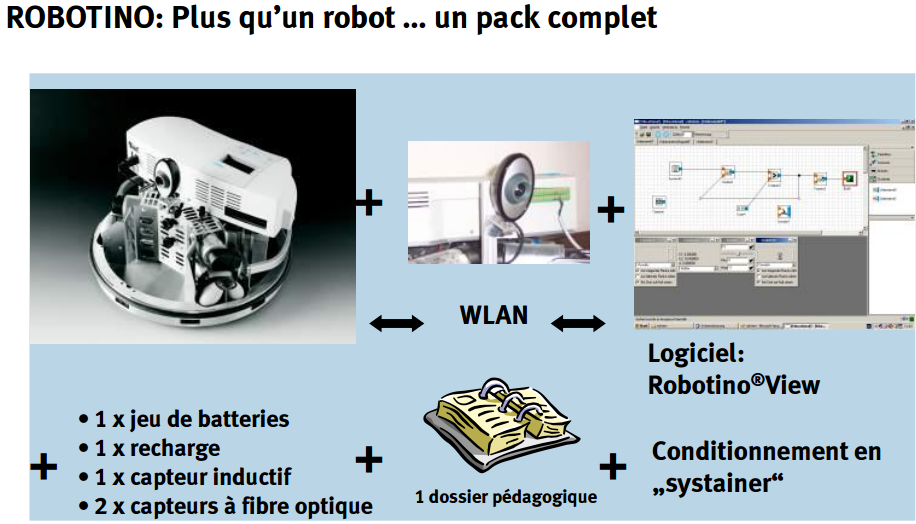
Le Robotino offre de plus des possibilités d’ajouts grâce à une carte d’entrée/sortie :
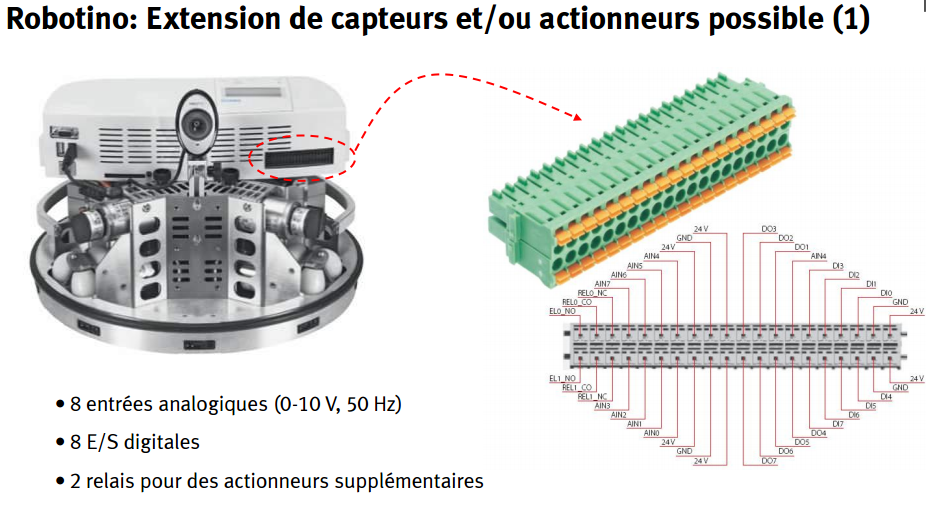
2. Composants
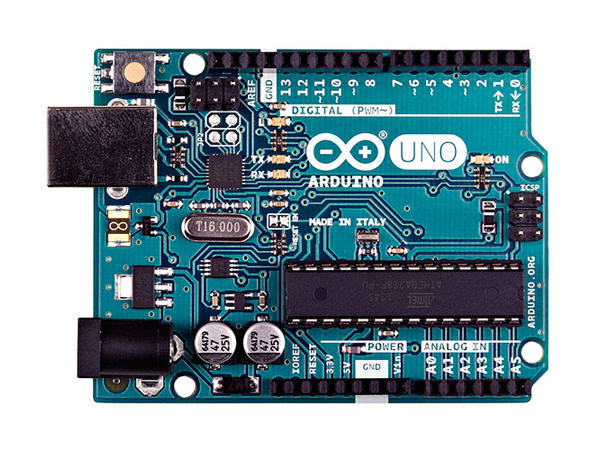
1. Microcontrôleur
Les données mesurées par nos capteurs sont transmises par l’intermédiaire d’un microcontrôleur Arduino, la carte Arduino Uno R3. En effet tous les capteurs sont branchés sur cette carte à l’exception des capteurs de distance.
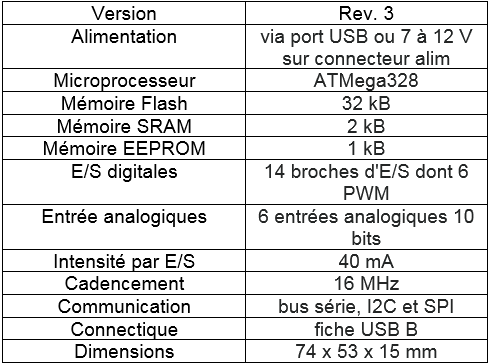
Caractéristiques de l’Arduino:
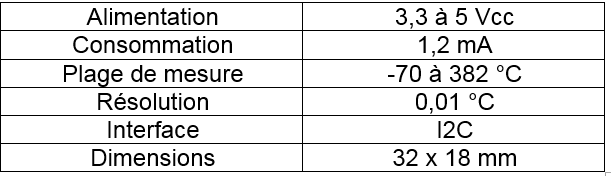
2. Capteur de température
Lors de sa ronde le robot de sécurité doit évaluer la température à divers endroits donnés. Pour cela il est équipé d’un capteur de température infrarouge sans contact qui peut mesurer la température en un point précis.

Caractéristiques de ce capteur :
Il faut bien sûr connecter ce capteur à la Carte Arduino Uno afin de pouvoir récupérer les données qu’il va enregistrer. Les branchements entre le capteur et la carte se font de la manière suivante :
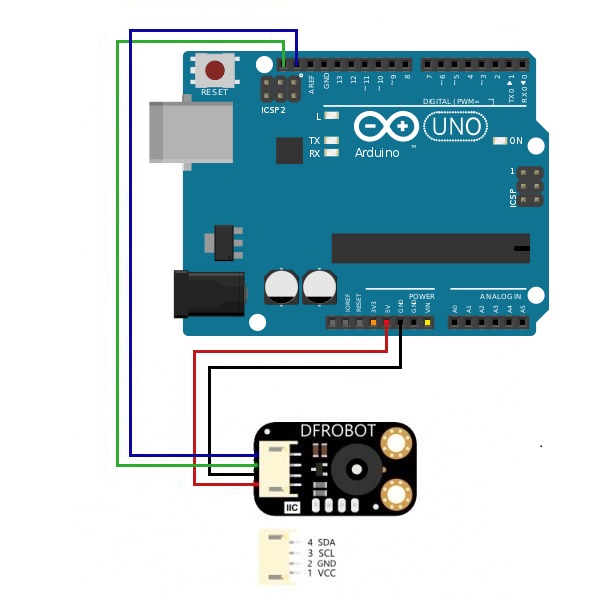
Il faut également programmer ce capteur à l’aide de l’IDE (environnement de développement) « Arduino IDE ».
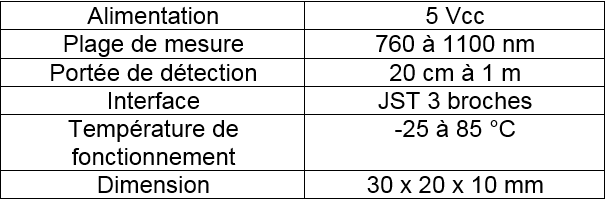
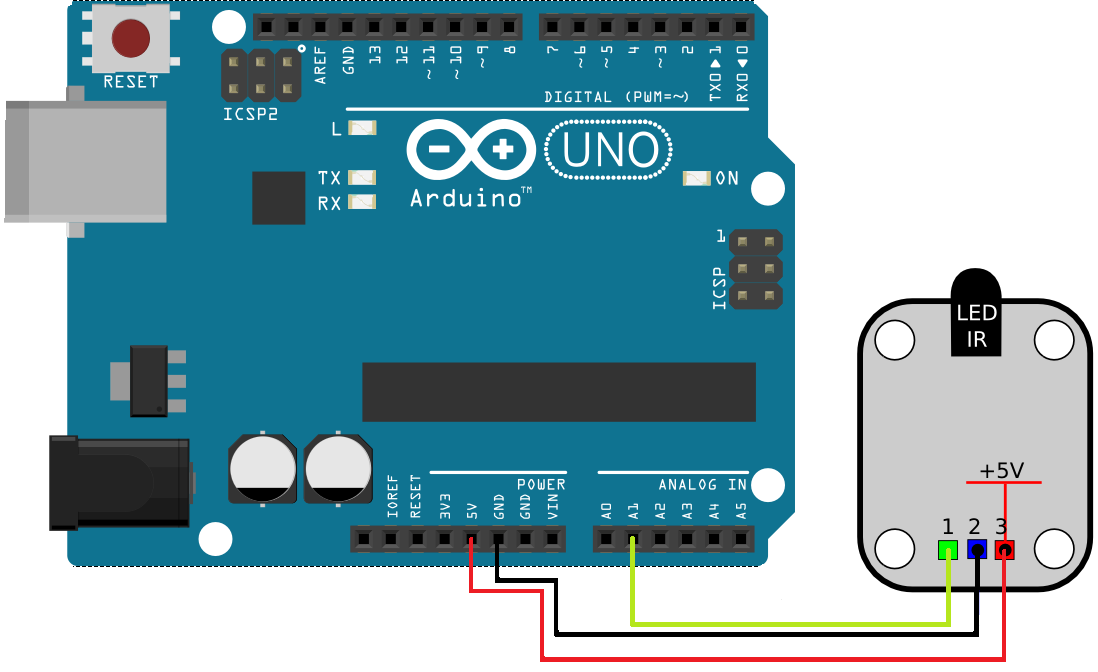
3. Capteurs de distance
Le robot de sécurité dispose de 9 capteurs de distance au niveau de son socle mais 6 autres de ces capteurs lui ont été ajoutés plus haut pour qu’il soit plus autonome lors de ses rondes.

Caractéristiques de ce capteur :

Branchements :

4. Capteurs de flamme
Le robot est capable d’identifié si un feu est présent à l’aide de ces 3 capteurs de flammes. Il peut donc prévenir du danger en envoyant un signal d’alerte si le capteur détecte la présence de flamme.
Caractéristiques de ce capteur :
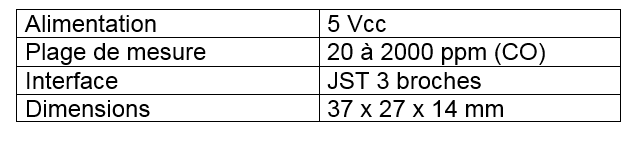
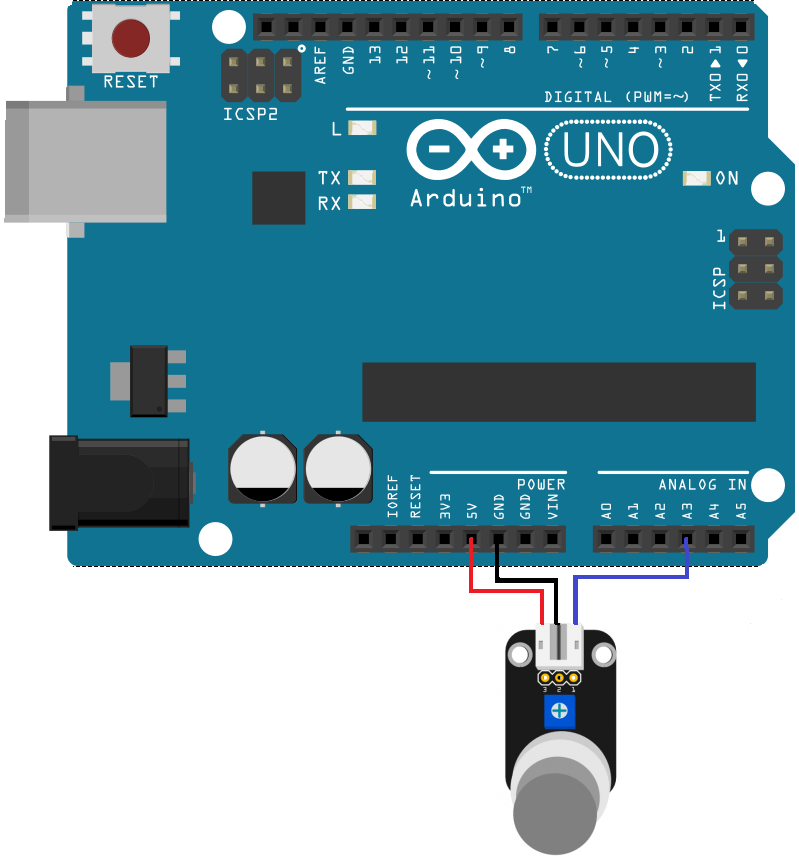
5. Capteur de monoxyde de carbone
Ce capteur est indispensable, il apporte énormément au niveau de la sécurité. Il est capable de mesurer le taux de monoxyde de carbone qui est un gaz incolore et inodore donc qui il est très dangereux pour l’Homme.
Caractéristiques de ce capteur :
Il est relié à la Carte Arduino de la manière suivante :
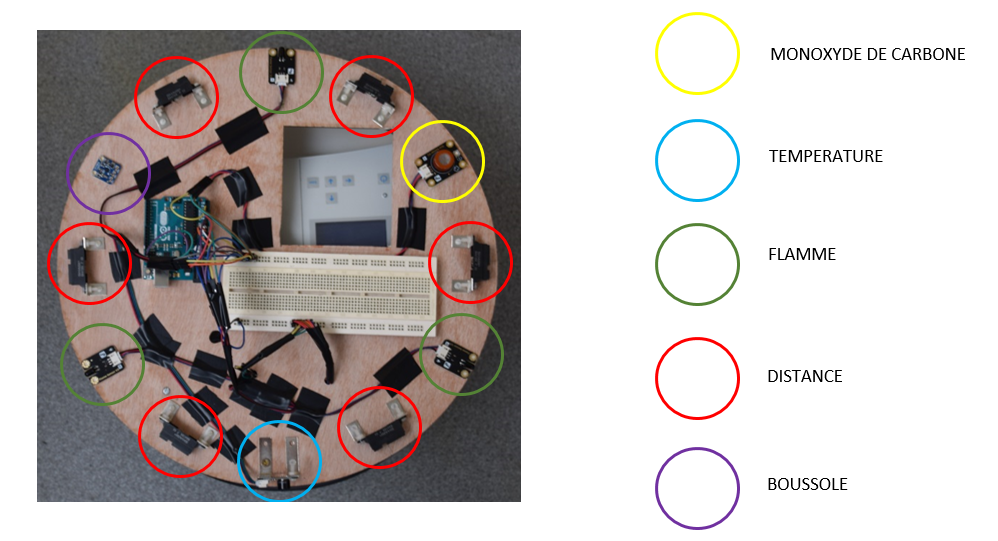
6. Support de capteurs
Tous les nouveaux capteurs (distance x 5, flamme x 3, température x 1, monoxyde de carbone x 1) sont fixés sur ce support en bois. Mais il y a également la carte Arduino ainsi que la BreadBord. Une boussole est aussi fixée sur le support mais elle n’est pas utilisée.
3. Pilotage du robot
1. Ordinateur
La connexion entre le robot et l’ordinateur se fait par l’intermédiaire du logiciel Robotino View. Il est possible de directement contrôler ces déplacements depuis ce dernier. Le wifi de ce Robotino n’est pas utilisable directement, il faut donc passer par l’intermédiaire d’un routeur (ALLNET) pour relier le robot à l’ordinateur. Lorsque le robot est en autonomie il utilisera le programme Robotino View implanté depuis l’ordinateur (voir programmation).
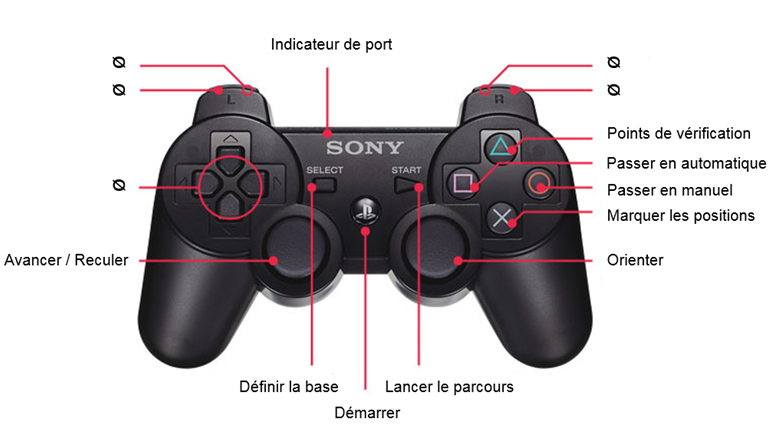
2. Manette
Il est également possible de déplacer le robot à l’aide d’une manette. Pour cela il faut brancher la manette au PC et utiliser Robotino View
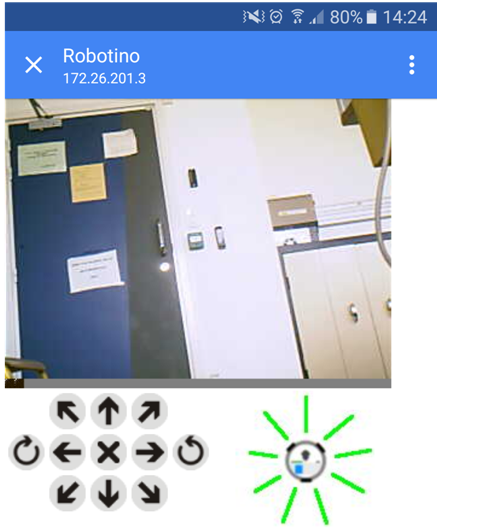
3.Smartphone / Tablette
Le pilotage peut se faire par l’intermédiaire d’un smartphone ou d’une tablette par le biais d’une interface web (voir ci-dessous). Le principe est simple il vous suffit de configurer votre Robotino en mode Client puis de rentrer son adresse IP sur internet.
4. Programmation
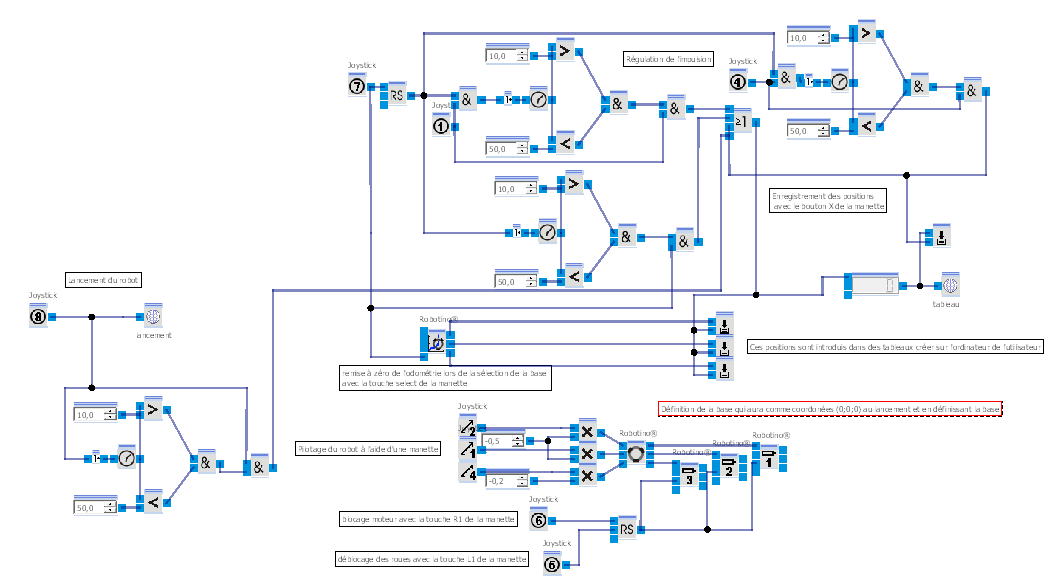
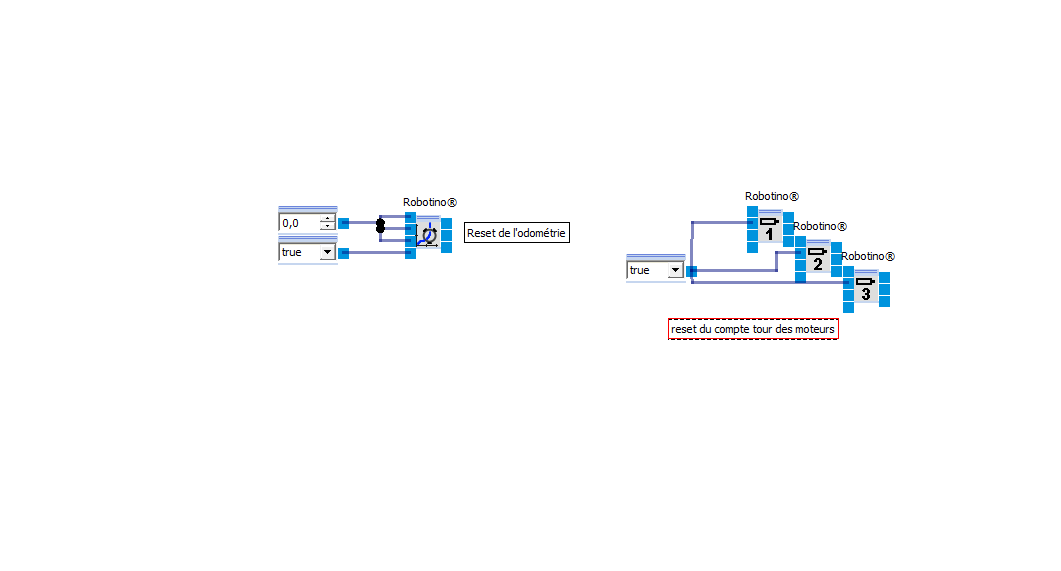
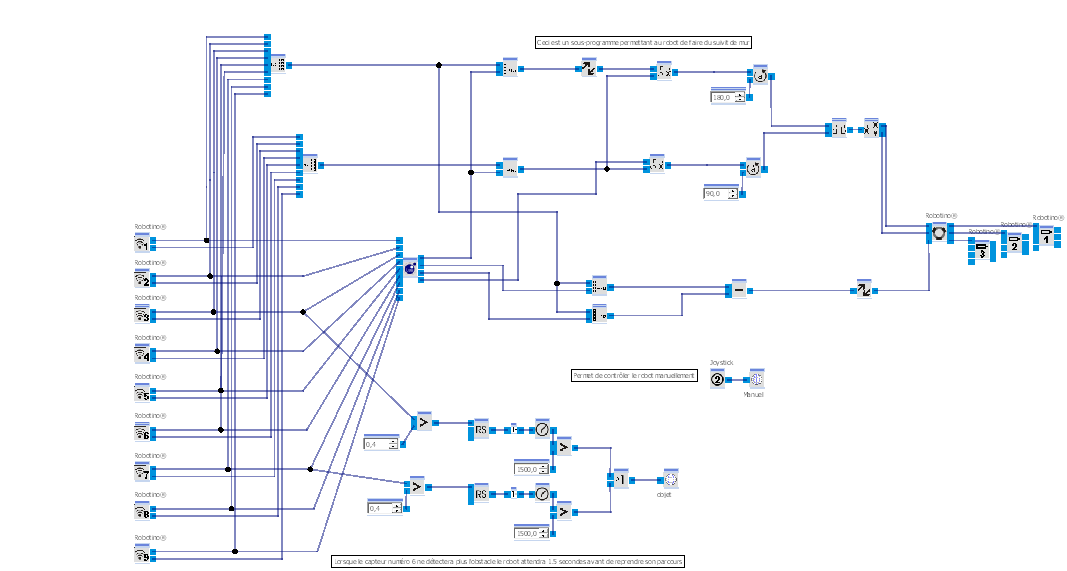
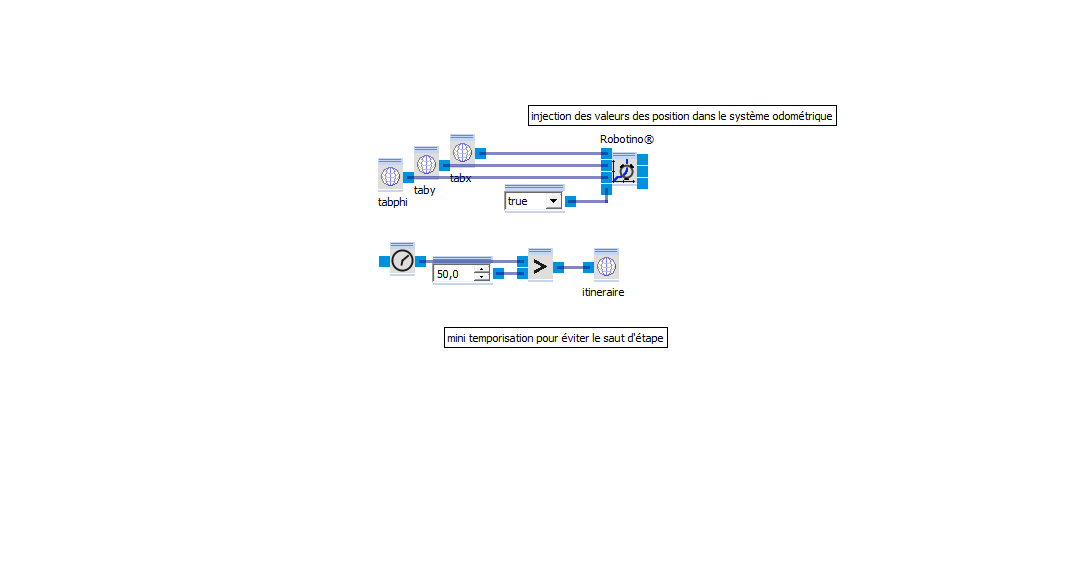
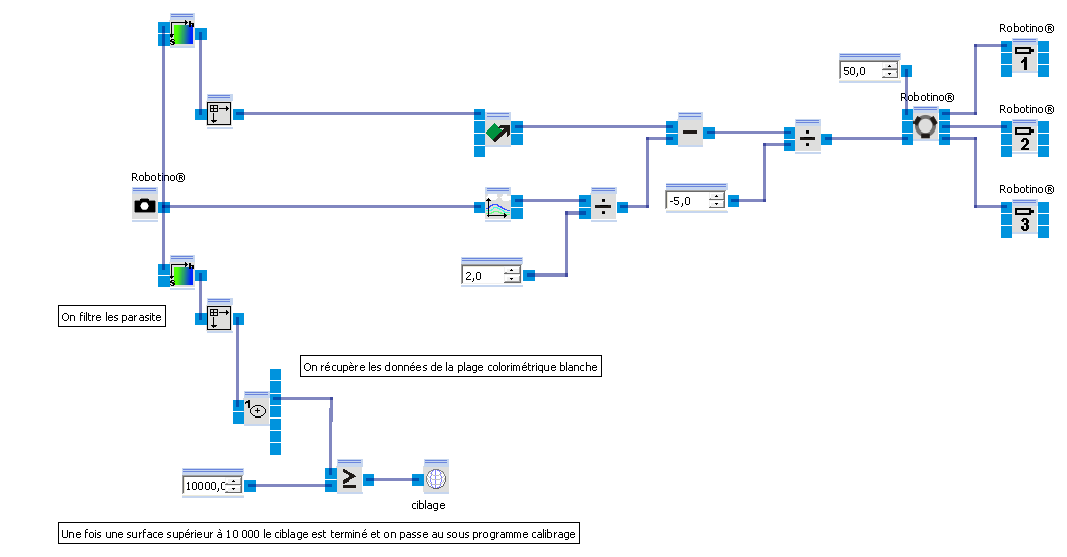
1. Robotino View
Resets
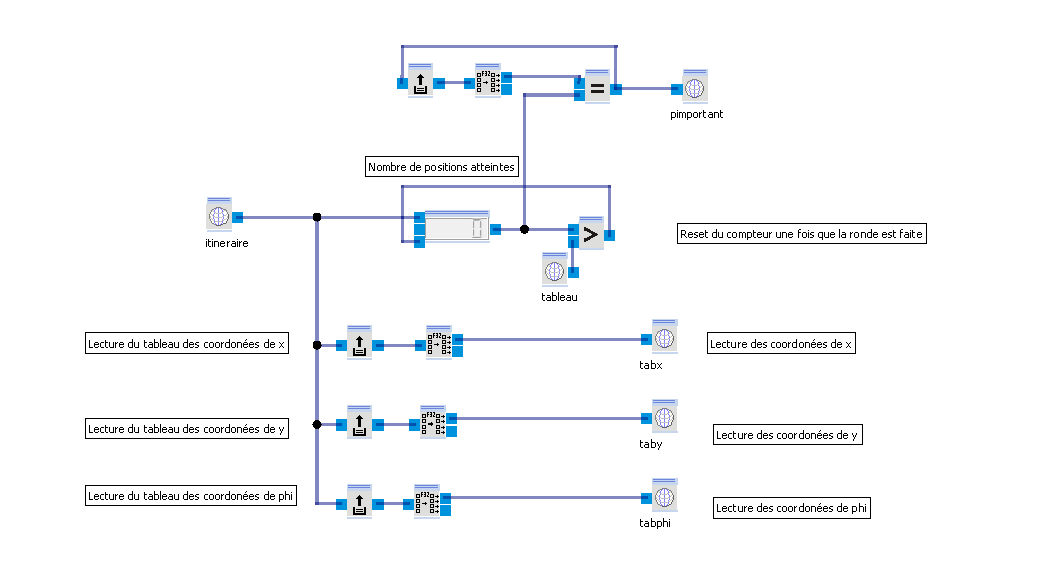
 Tableaux
Tableaux
Contrôles

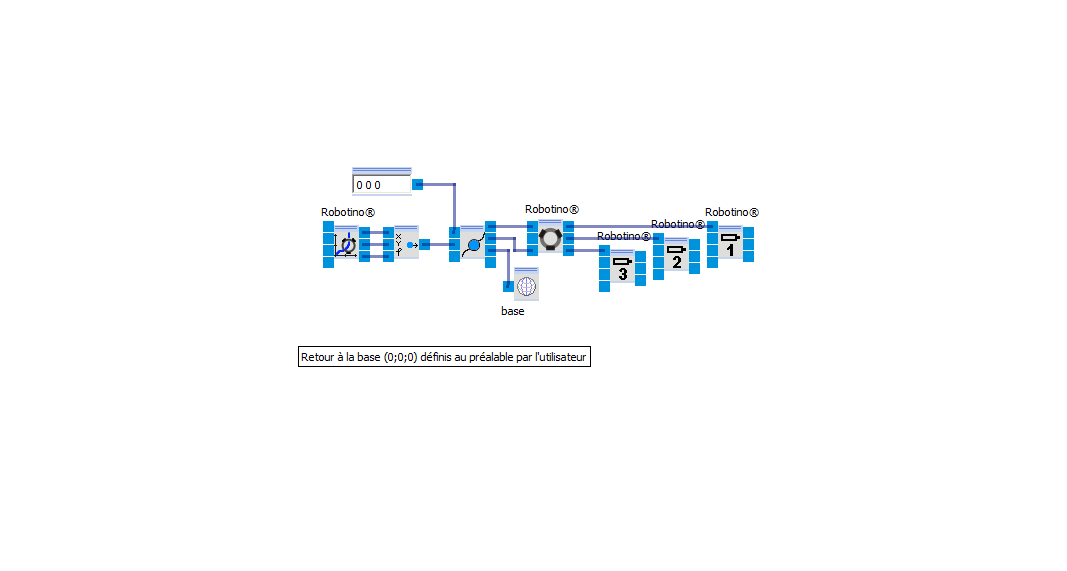
Retour base
Initialisation
Lecture
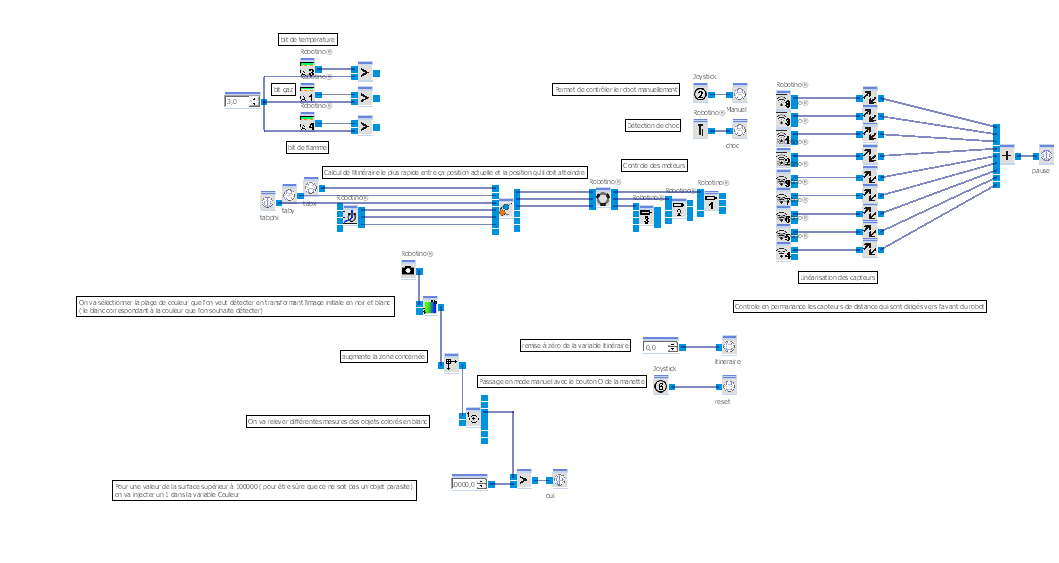
Vérification

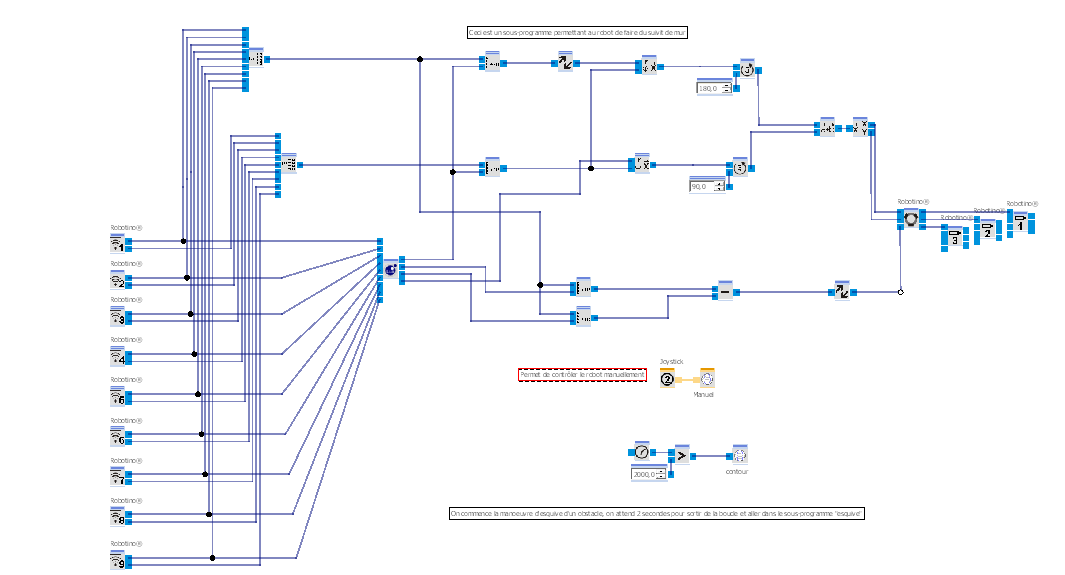
Contrôle manuel

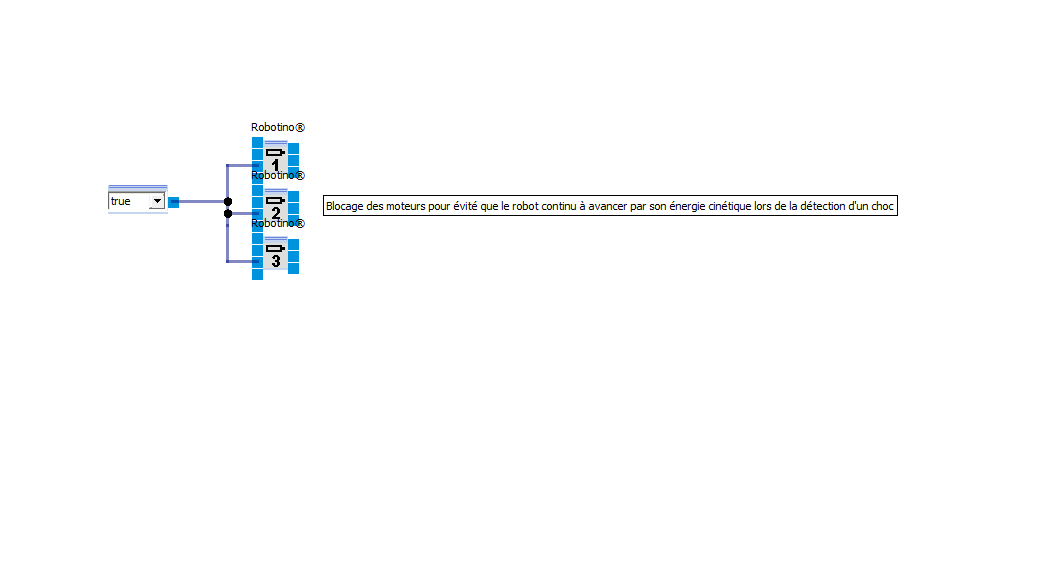
Choc
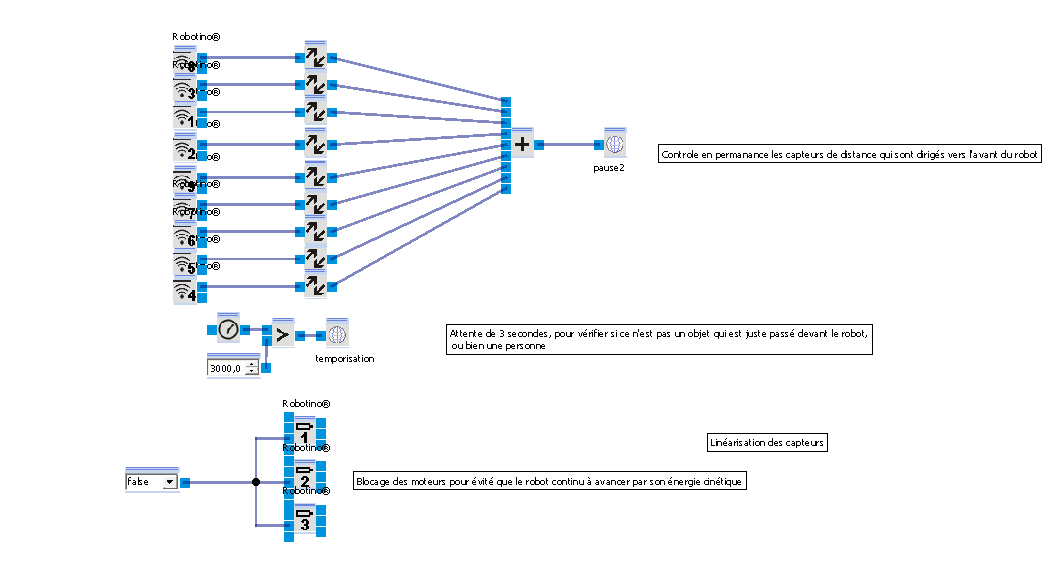
Attente
Esquive (Partie 1 + 2)
Correction
Ciblage
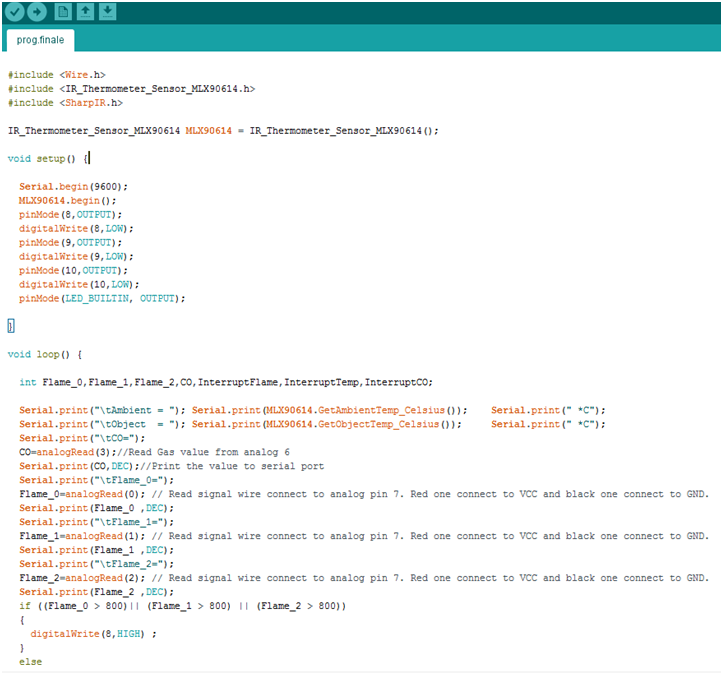
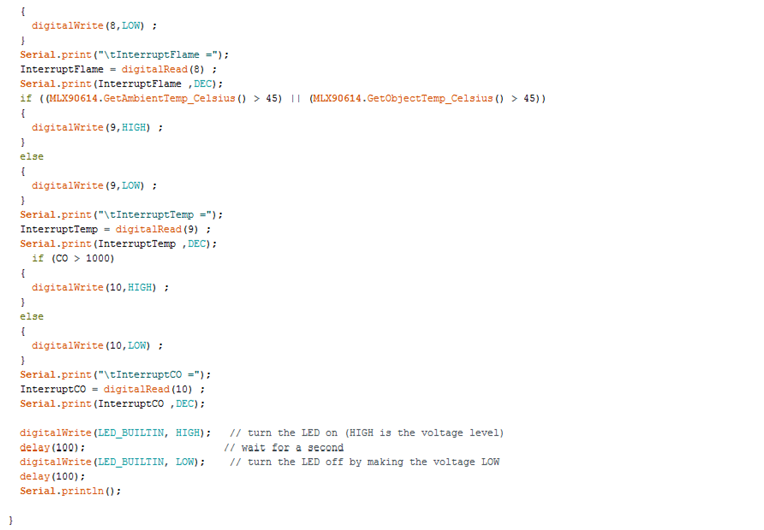
2. Arduino
Voici la programmation des capteurs présents sur le support (excepté les capteurs de distance). Nous avons utilisé plusieurs bibliothèques dédiées (Wire.h, ShaprIR.h…) facilitant la programmation. Après avoir récupéré les données analogiques, plusieurs tests sont effectués (tests simples photo 2) afin de générer ou non un signal d’alerte.
Bilan
Le robot de sécurité est capable d’apprendre un itinéraire puis de le reproduire de manière autonome et intelligente car il peut éviter des obstacles et reprendre sa trajectoire. Pour se recaler dans la bonne position, le robot se repère à l’aide de bandes de couleur et inductives placées au sol sur son trajet. Durant ses rondes, ses capteurs mesurent le taux de monoxyde de carbone (CO) ainsi que la température et ils vérifient qu’aucune flamme n’est à proximité. Il est possible d’observer les informations mesurées par le robot directement sur le logiciel Robotino View.
Nous aurions aimé que les informations entre le robot et l’utilisateur puissent se faire sans l’intermédiaire du logiciel et qu’il puisse se diriger vers une borne de chargement de manière automatique lorsque ces batteries sont presque vides.
Mais nous sommes néanmoins satisfaits du travail effectué.
Perspectives d’évolution
Notre robot de sécurité n’a bien évidemment pas atteint le maximum de son potentiel. En effet il est possible de l’améliorer encore, d’améliorer ses fonctionnalités selon vos besoins et vos envies.
Propositions d’idées :
- Secourisme (assistance + apport du matériel)
- Détection et vérification de colis
Améliorations techniques proposées :
- Interface Web robot/agent de sécurité (wifi)
- Connexion entre le robot et les différentes alarmes du bâtiment
- Cartographie du bâtiment permettant d’obtenir la position en temps réel du robot
- Etanchéité (eau/feu)
- Recharge automatique (borne)

Bibliographie
Cahier des charges fonctionnelles : CDCF
Cahier des charges techniques : PARTIE 1 / PARTIE 2 / PARTIE 3 / PARTIE 4
Notice d’utilisation : PARTIE_1 / PARTIE 2
Etude des robots existants ou en projet similaires au notre : ETUDE
Rapport des séances de projet : RAPPORT
Brainstorming avec les lycéens : BRAINSTORMING
Remerciements
Les Lycéens en CAP Agent de Sécurité de Pulversheim qui ont collaboré avec nous.
L’IUT de Mulhouse ainsi que l’IUT LAB pour le budget et l’apport de matériels.
Nos professeurs encadrants Mr Hueber et Mr Choisy ainsi que le professeur du Lycée Mr Pflieger.


![]()







