
 MARIANJUDE Antony BRULANT Antoine
MARIANJUDE Antony BRULANT Antoine

SOMMAIRE
Introduction
Mission à réaliser
Nos contraintes
La phase de test
L’avancée du projet
La vidéo finale de la première partie
Avenir
Conclusion
Introduction
Définition CanSat :
CanSat est un concours qui consiste à mettre en compétitions plusieurs écoles ou associations en créant un dispositif, nommé CanSat.
Ce projet consiste en un petit système, lancé via un ballon, qui doit atterrir via l’utilisation d’un parachute. Puis une fois au sol, il doit effectuer différentes mesures et l’envoyer sur un ordinateur.

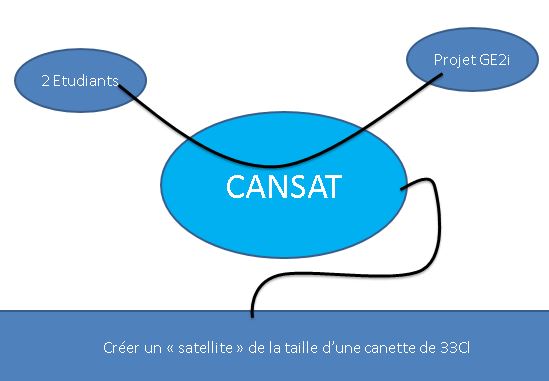
Le diagramme bête à cornes nous montre le but de ce projet. Les projets ER dans l’option informatique sont composés de 3 groupes avec 3 étudiants dans chaque groupe. Au départ nous étions 3 personnes mais finalement on est plus que 2 étudiants dans l’équipe.
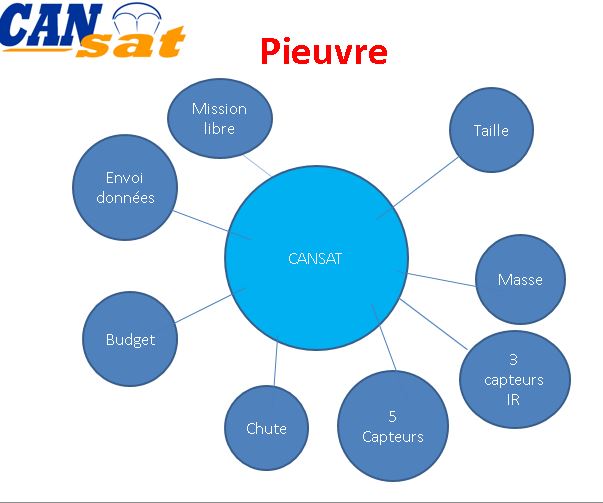
Le diagramme pieuvre montre les contraintes et les différentes étapes que l’on doit accomplir pour réussir le projet.
Voici notre GANTT qui est le planning du projet.Dans ce GANTT,il est représenté la partie étude du projet. La partie réalisation a été faite dans la semaine du 20 mars.
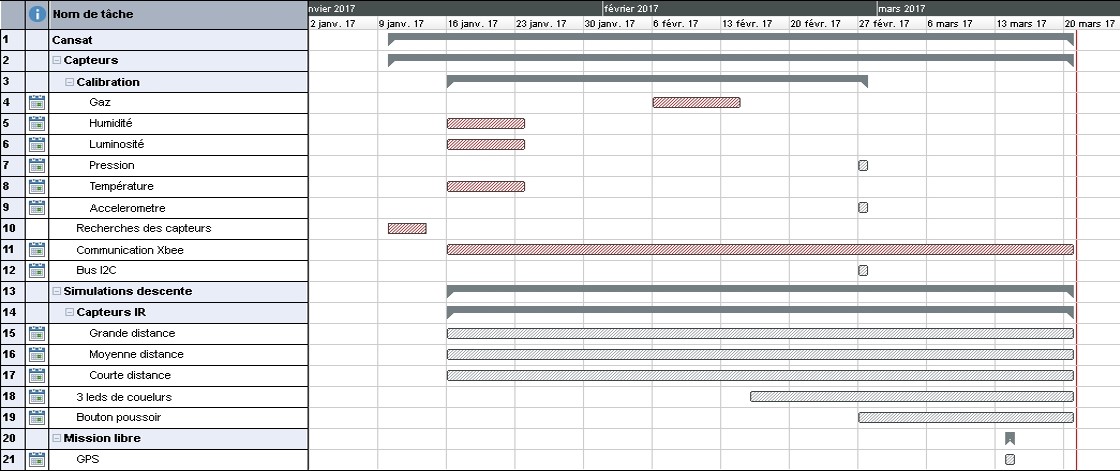
-Gris : tâches en cours
-Rouge : tâches terminées
Mission à réaliser
Pour réaliser notre CanSat, nous utilisons un PIC18F4520 comme unité de contrôle, pour l’envoi des données, nous utilisons un module xBee qui permet à la CanSat de communiquer directement avec un pc équipé d’une clé USB adapté. Lorsque la CanSat est à terre, nous effectuerons ces mesures : Température,Humidité,Pression,Altitude et Luminosité.
Pour alimenter les capteurs, nous utilisons un module présent dans le PIC qui permet de diminuer la tension et d’alimenter les capteurs avec leur tension d’alimentation respective.

Nos contraintes
La contrainte majeure d’une CanSat est son volume, qui ne doit pas dépasser celui d’une canette de 33Cl. La taille des capteurs doit être réduite pour les placer dans la CanSat.
Les autres contraintes sont :
-Le prix, car nous disposons d’un budget limité.
-L’alimentation, car la CanSat doit pouvoir envoyer des données pendant au minimum 72h, grâce à 4 piles 1,5V chacune.
-L’organisation, nous devons disposer les capteurs pour qu’ils puissent fonctionner correctement, sans être gêné par la CanSat ou les autres capteurs, et aussi un module PIC, un xBee, et les 4 piles.

La phase de test
Partie 1
L’avancée du projet
CAPTEUR IR
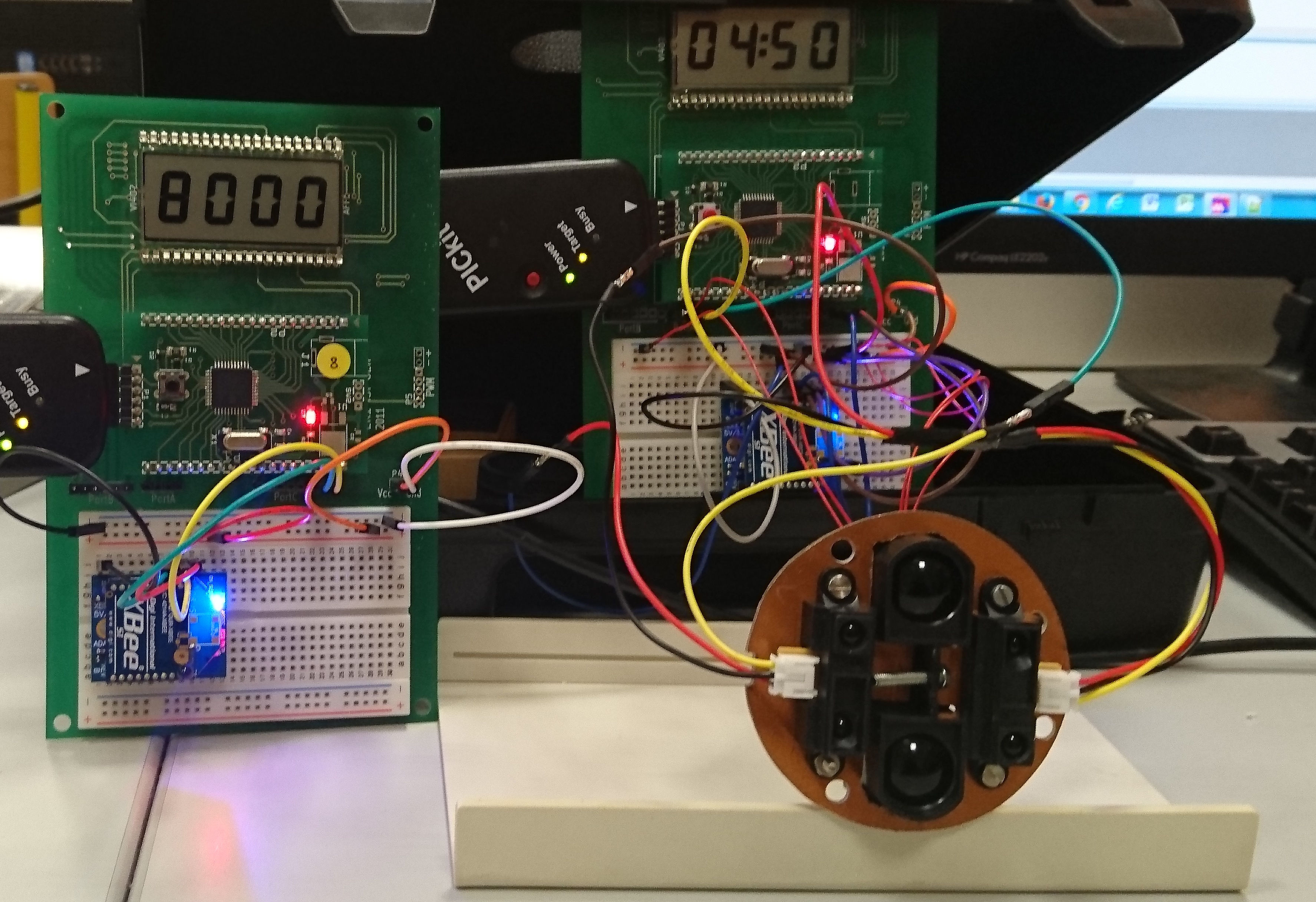
L’afficheur LCD à gauche simule la phase de descente de la CanSat : 1 la CanSat a une fort altitude 2 son altitude est moyenne 3 La CanSat est proche du sol et 8 la CanSat est au sol. L’afficheur LCD à droite affiche les valeurs brutes de l’altitude de la CanSat.
Chaque capteur mesure une distance distincte. On active le capteur de grande distances, puis le capteur de moyenne distance et enfin le capteur de petite distance.
On envoie le numéro du capteur de l’on utilise via un module xBee.
CAPTEUR DE LUMINOSITE
Le résultat affiché est « brute ».On affiche directement la tension de la sortie du capteur. La tension est inversement proportionnelle à la luminosité.
CAPTEUR D’HUMIDITE
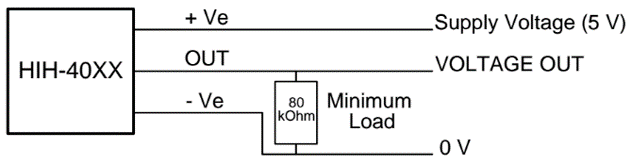
On a utilisé le capteur d’humidité HIH-4000.Pour le branchement du capteur, on a regardé sur la fiche technique du composant.
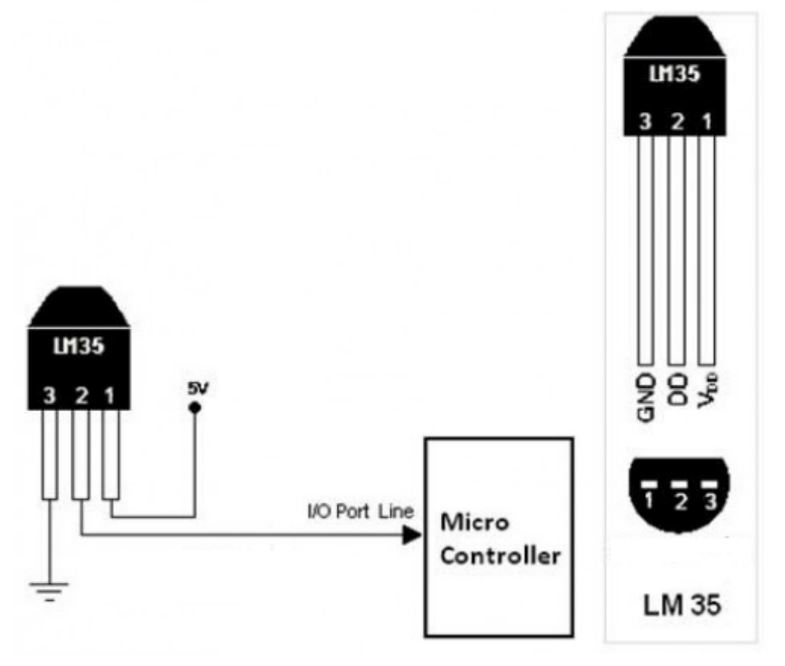
CAPTEUR DE TEMPERATURE
On est en phase de test du capteur de température LM35CAZ. Il affichera la température de la pièce sur l’aficheur LCD.
La vidéo finale de la première partie
Avenir
On est dans l’attente des capteurs commandés(image ci-dessous). Quand on les recevra,on va devoir les calibrer et mettre ensemble tout les capteurs.

On doit également mettre en place le mode veille du pic18f4520 afin que l’on consomme peu lorsque la CanSat prendra ses mesures au sol. Les capteurs d’altitude devront être éteint lorsque la CanSat sera au sol et on mettra un bouton poussoir afin que l’arrivée au sol soit détectée par la CanSat.
On doit également mettre en place le parachute et la portabilité du programme finale via le pic18f4520.
Conclusion
On a également travailler sur la partie Etudes des Etudes et Réalisation. Il nous reste à finir toute la partie réalisation. Au semestre 4,on continuera ce projet.
On remercie Monsieur HAEBERLE et nos collègues du projet CanSat US.
Partie 2
Pour ce dernier semestre à l’IUT, notre projet d’Etude et Réalisation est la suite du projet Cansat IR. Dans la première partie, nous avons fait le test des différents capteurs pour les mesures scientifiques et pour la détection du sol. Dans cette deuxième partie, nous allons approfondir la phase de détection du sol et faire un programme qui regroupera tous les capteurs que l’on utilisera.
Les nouveaux capteurs qu’on a reçu sont :

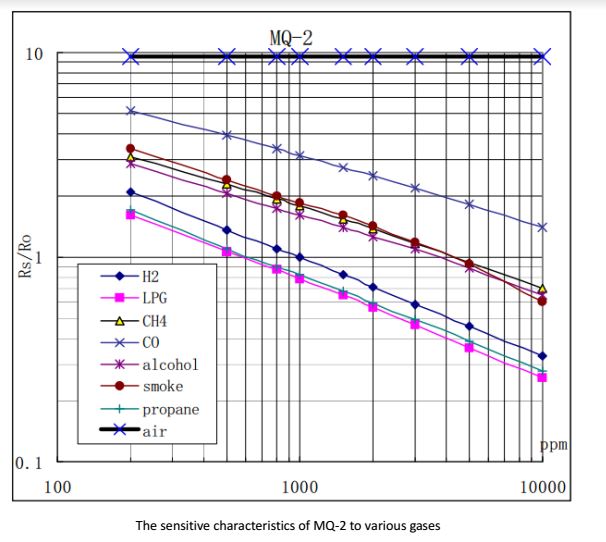
Voici,le capteur de Gaz, il détecte la pollution,le méthane…
Le tableau ci-dessous qui vient de la datasheet du composant, montre les différentes mesures prises par ce capteur.
La phase étude du capteur
Lorsque le capteur ne détecte aucune pollution dans l’air :
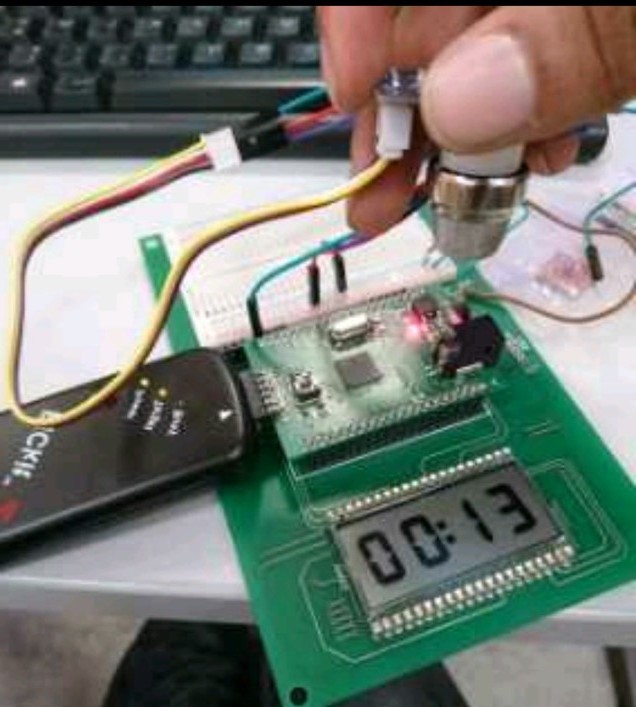
Lorsque le capteur détecte de la pollution dans l’air(ici émanant du briquet) :
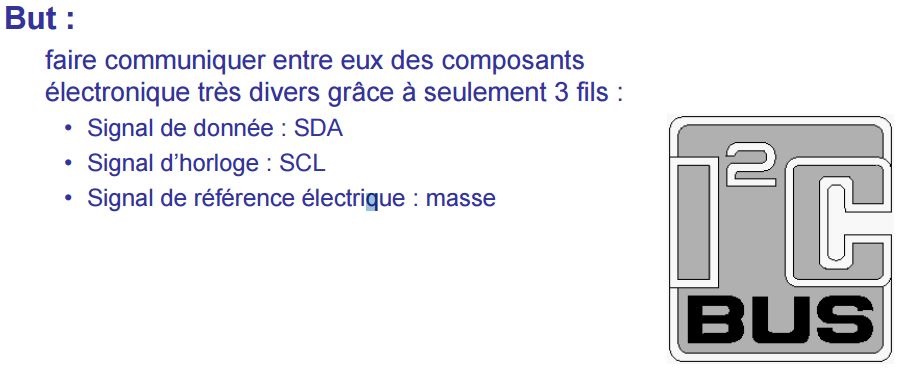
Pour les capteurs suivant(ceux en rouge),ce sont des capteurs en protocole I2C.
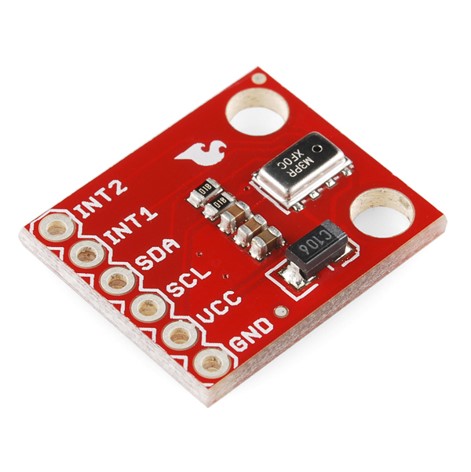
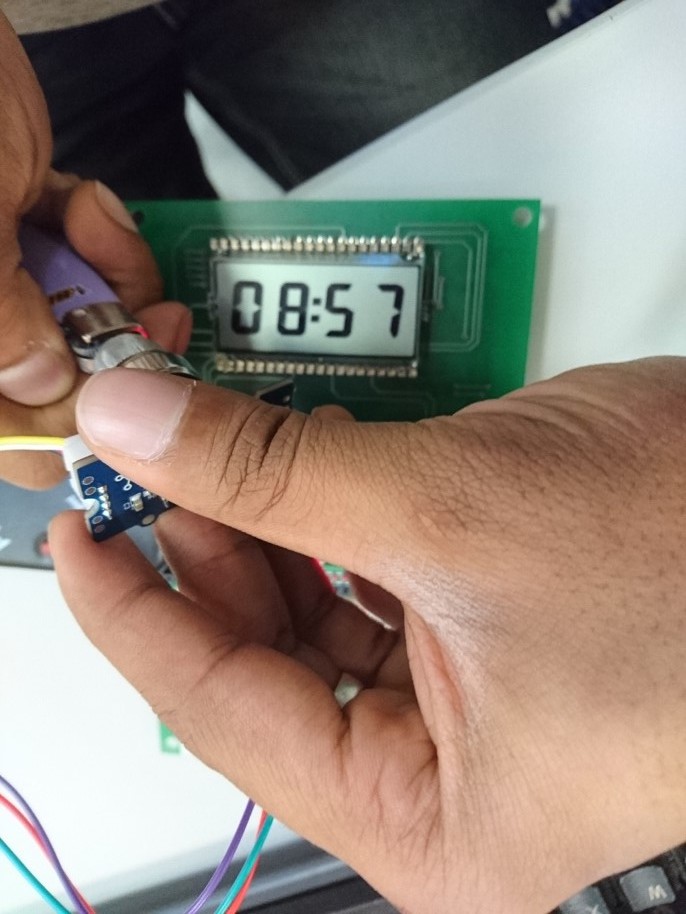
MPL3115A2(PRESSION_I2C)
MMA845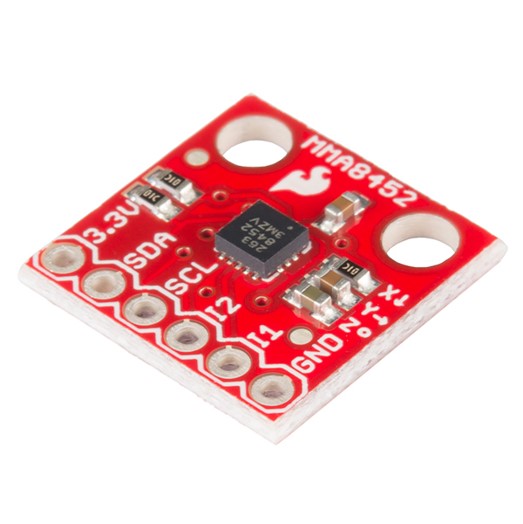 2Q(ACCELEROMETRE triple axes_I2C)
2Q(ACCELEROMETRE triple axes_I2C)
Par un retard sur le projet et un équipier en moins, on a passé les capteurs I2C. Vous pouvez voir ci-dessous leur fonctionnement.
Le capteur de pression :
L’accéléromètre triple axes :
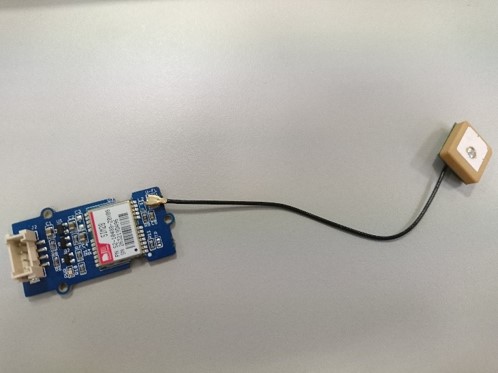
En ce qui concerne la mission libre, on a choisi un module GPS mais la datasheet du composant n’était pas présente. On aurait pu choisir la norme Sony du programme Arduino pour faire notre programme. Le composant est arrivé vers la fin du projet.
Le module GPS :
Avec Hyperterminal et les modules Xbee, nous avons conçu un programme qui permet de lire à distance les valeurs prises par les différents capteurs pour la partie « Mesures scientifiques ».
Pour la partie détection au sol, nous avons rencontrés certains conflits pour transformer le programme qui affichait directement la valeur du capteur infrarouge sur l’afficheur LCD en programme qui simule la valeur du capteur infrarouge via une led de couleur.
Après plusieurs échecs, nous avons finalement réussi à simuler cette descente comme vous pouvez le voir dans la vidéo ci dessous :
Comme vous pouvez le voir dans cette vidéo, lors ce que la main approche du capteur IR :
-Grande distance: la led rouge s’allume
-Moyenne distance:la led jaune s’allume
-Courtes distance:la led verte s’allume
Et lorsque le bouton poussoir est appuyé toutes les leds s’allume. Il nous reste également à changer cette partie,c’est-à-dire lorsque le bouton poussoir sera enclenché on passera du programme « Détection du sol » au programme « Prises des mesures scientifiques ».
Pour la partie mesure scientifiques,voici les mesures des capteur affichés sur l’ordinateur via le logiciel Hyperterminal (quelques parties repris sur l’application bloc-notes suite à une indisponibilité de l’ordinateur pour les captures d’écran sur Hyperterminal):
Ces mesures représentent les valeurs prises par les capteurs IR.
Pour le mode « sleep », nous avons pu éteindre la Cansat avec la procédure Sleep( ) mais on n’a pas réussi à la réveiller.
Maintenant passons à la partie Physique de la Cansat.
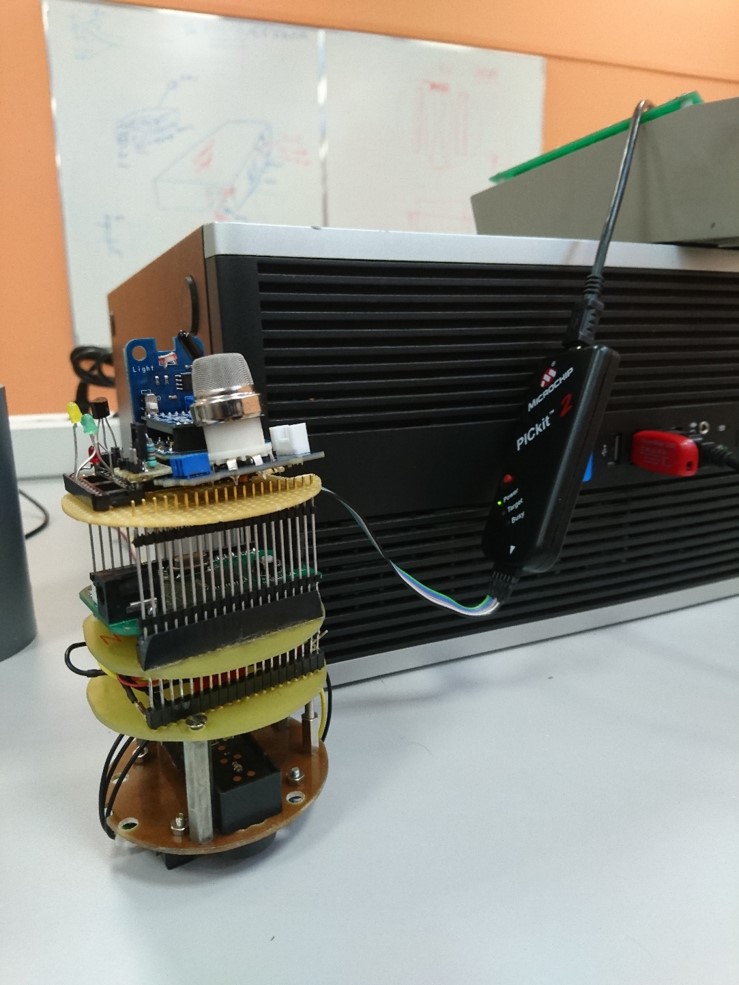
Sur cette image,nous avons commencé la partie physique de la Cansat,le premier étage est composé des capteurs pour les mesures scientifique.Le second étage est dédié au PIC18F4520 et le troisième étage est pour l’alimentation avec 4 piles de 1,5 V chacune. Dans le dernier étage nous avons les capteurs infrarouges comme l’on peut le voir sur cette photo :
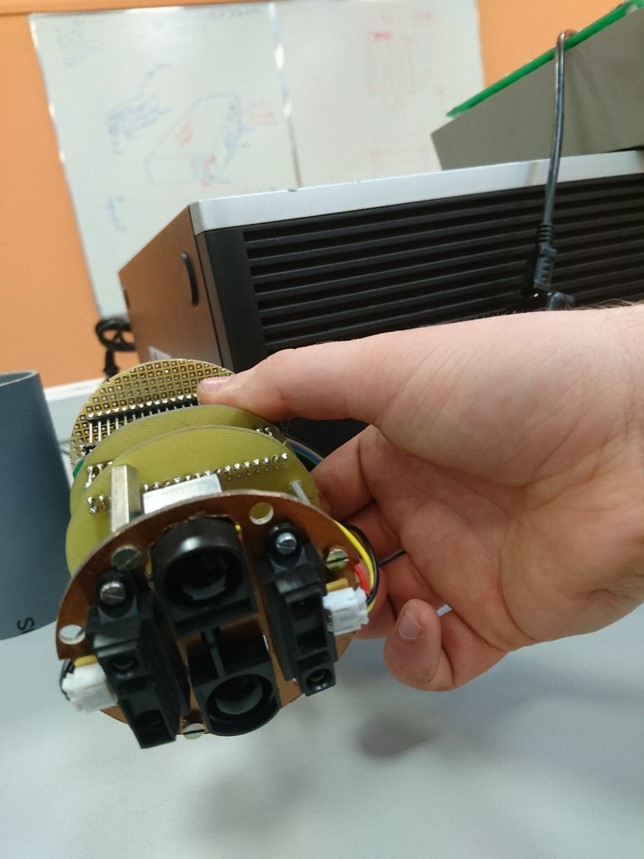
Cette Cansat sera protégé par un tube en PVC lors de son arrivée au sol.
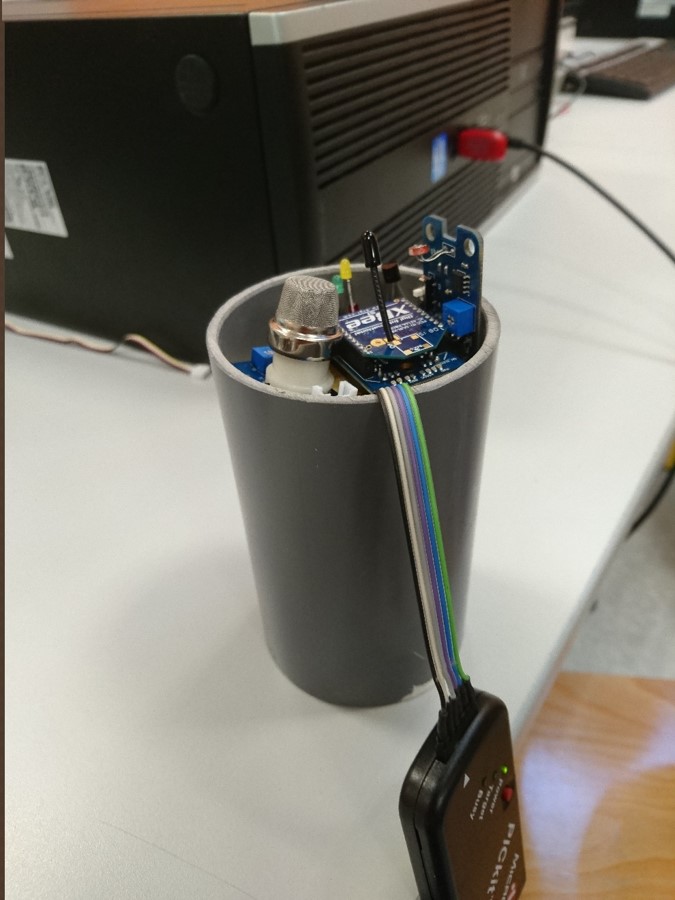
On a également placé une nappe entre le pic18f4520 et le pickit pour faciliter la programmation de la Cansat.
Remerciements
Merci d’avoir lu cet article sur notre projet Cansat IR. On tient à remercier Monsieur HAEBERLE pour les conseils et l’aide qu’il nous a fourni pour le projet Cansat et pour nos présentation.Cela nous aidera à nous améliorer pour notre soutenance de stage qui clôturera notre DUT. Et on remercie le groupe Cansat US pour l’aide qu’ils nous ont fourni pour les plaquettes de la Cansat.