

Projet déstockage par robot Tx40
Membre du groupe
MULLER Quentin et DUBY Luc
Présentation du projet
Ce projet consiste à utiliser le robot Tx40 et l’automate de stockage. Le but de ce projet est grâce au robot de chercher les pièces de l’automate de stockage, de les prendre puis de les déposer en palette par colonne de deux pièces. L’utilisateur pourra choisir quelle pièce il voudra prendre (rouge, noir ou métallique) et/ou faire des combinaisons telles que rouge/noir ou bien métallique/rouge par exemple.
Présentation de l’équipement
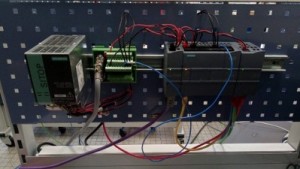
Pour ce projet, nous avons utilisé le robot Tx40, c’est un robot articulé avec 6 degrés de liberté de la marque Stäubli.

Nous avons aussi utilisé l’automate de stockage pour amener les pièces dans le bon compartiment. C’est un automate de la marque Siemens que nous avions déjà vu en première année en API.

Réalisation
Pour la réalisation de ce projet, nous avons utilisé différents logiciels de programmation.
- Pour la partie automate, nous avons utilisé le logiciel Siemens TIA Portal. Cela permet des programmer des automates (API) grâce à des programmes en ladder.
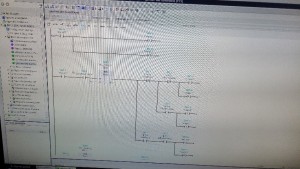
- Pour la partie robot, nous avons programmé grâce au logiciel Staubli ou directement grâce à la commande du robot.
Commande

Programmation
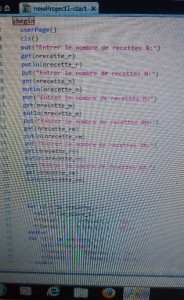
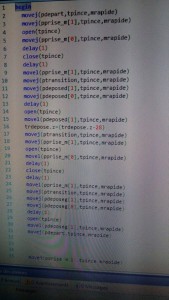
La programmation du robot est la partie la plus importante du projet, la plus longue et la plus difficile. Durant la programmation nous avons quelques problèmes comme le problème de collision avec l’automate quand le robot prend les pièces ou alors quand le robot ne peut pas aller à un endroit dû à un encombrement. Le fais de programmer directement sur la commande à été difficile et long car nous avons jamais fais cela avant. Le deuxième problème à été que le robot ne faisait pas exactement ce que la simulation montrait.
Rendu visuel du projet
A ce jour, le robot empile correctement chaque recette (r/r, n/n,m/m,n/m,n/r et r/m). Ce qu’il manque encore est le fais de faire plusieurs recettes à la fois, car il y a un problème dans les transformées du programme.
Nous n’avons pas réussi à arriver à la partie communication entre le robot et l’automate qui nous permettrait une gestion de nombre de pièce grâce aux différents compteurs.
Semestre 4
Présentation du projet
La suite du projet consiste à utiliser le robot Tx40 et l’automate de stockage. Le but de ce projet est, grâce au robot, de chercher les pièces de l’automate de stockage, de les prendre puis de les déposer dans chaque emboitement des différents socles. L’utilisateur pourra choisir quelle pièce il voudra prendre (rouge, noir ou métallique) et/ou faire des combinaisons telles que rouge/noir ou bien métallique/rouge par exemple.
Création de socle
Nous avons du créer deux socles grâce à une machine de découpe au laser, les différentes pièces s’emboiteront dans chaque emboitement un a un.

Programmation
Après avoir étudié le nouveau but du projet, nous avons regardé si nous pouvions reprendre des parties de notre ancien programme. La partie du programme de prise des pièces est inchangé, mais toute la partie dépose a du être refaçonner.
Communication
Un autre but du projet était de mettre en place un communication TCP/IP entre l’automate et le robot Tx40 pour pouvoir connaitre le nombre de pièces dans l’automate.


Nous avons d’abord essayé une communication local grâce à un hyperterminal. Nous avons pu envoyer un caractère qui correspondait à la détection de pièce dans l’automate. Cet essai à réussi et donc nous avons pu passer à l’étape suivante.
Nous avons alors essayer la communication entre le robot et l’automate sans succès.