

Élèves en charge du projet :
Aladin SEDIRI et Arthur LAVALLEE.
Introduction :
Pour notre projet d’étude et réalisation nous travaillons sur le malaxeur. L’armoire été en cours de rénovation mais on nous à finalement charger de la réaliser. Le projet a pour but de refaire en grande partie le câblage de l’armoire électrique du malaxeur et de sa partie opérative ainsi que la programmation de l’automate et de l’interface homme/machine. Pour cela nous avons procédés en plusieurs étapes.

Principe de fonctionnement du malaxeur :
Avant de vous détailler les différentes étape du projet nous allons vous lister certains des composant et capteur afin de mieux comprendre comment fonctionne le malaxeur.
Le malaxeur est composé d’un automate et d’un variateur de vitesse qui vont tout deux gérer le mode de fonctionnement automatique et d’un pupitre pour gérer le mode de fonctionnement manuesi que gérer la sélection du mode de fonctionnement. Le pupitre possède également des voyants et des boutons pour gérer une partie de la sécurité du système.
Le système possède également une cuve pour accueillir les matériaux à malaxer ou mélanger, une pâle pour le malaxage,une plaque chauffante positionnée en dessous de la cuve pour pouvoir faire chauffer les matériaux présent dans la cuve, d’une sonde de température pour s’assurer que la température de chauffe de la plaque soit adaptée au matériaux présent dans la cuve,un première moteur que sera piloté par la variateur de vitesse pour pouvoir modifier la vitesse de rotation de la pâle, un seconde moteur pour pouvoir faire monter et descendre la pâle, il possède également des capteur de position tout ou rien (TOR) pour pouvoir s’assurer de la présence de la cuve et de la position (haute ou basse) de la pâle.
Etape de réalisation du projet :
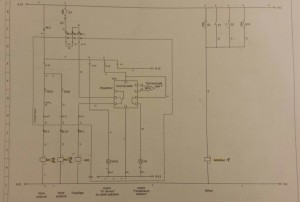
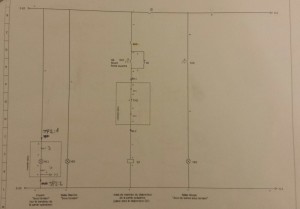
La première étapes a été d’étudier le schémas électrique du malaxeur afin de bien identifier les différents composants présent dans l’armoire électrique et dans la partie opérative pour pouvoir s’adapter et donc ajouter ou enlever des composants selon nos besoin.
La seconde étape a été d’enlever tout les repères et de retirer tout les câbles de l’ancienne installation afin de tout recâbler correctement selon les nouveaux plans de câblage.
la troisième étape a bien évidement été le recâblage en prenant bien soins de repérer tout les câbles selon le nouveau schémas afin de pouvoir repérer les différents câbles et intervenir rapidement en cas de panne du système.
la quatrième étape sera l’étape de test de l’armoire électrique hors tension à l’aide d’un ohm mètre pour vérifier si tout les composant de l’armoire sont raccordés correctement selon les plans de câblage et si il n’y a pas d’éventuel cours-circuit pour ne pas endommager les composant de l’armoire électrique.
Et la cinquième et dernière étape sera la programmation de l’interface homme/machine (écran tactile) ainsi que la programmation de l’automate qui tous deux servirons au bon fonctionnent du malaxeur.

Problèmes rencontrés :
Notre plus gros problème a été le manque de temps car le décâblage et le recâblage à été une étape très longue de ce projet. Nous avons également eu quelque petit problème durant le câblage notamment sur le raccordement de la terre et des masse car il nous devions utiliser des borniers que nous n’avions pas sur le moment mais nous avons résolut rapidement ce petit soucis.
Avancement du projet :
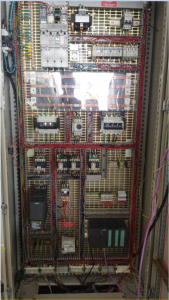
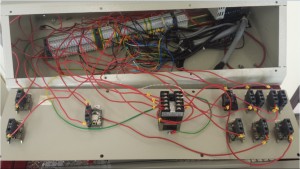
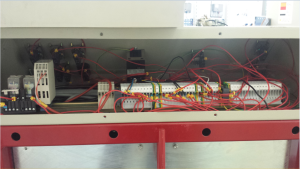
Nous avons recâblé la totalité de la partie opérative, de l’armoire électrique ainsi que le câblage de l’automate et du variateur, seul la liaison entre l’automate et le variateur n’a pas été faite. il reste cependant beaucoup de travail car il faut encore contrôler chaque connexion entre les différents organes de commande et de sécurité avec un ohm mètre pour s’assurer qu’il n’y a pas de mauvais branchement et donc d’éventuel cours-circuit et faire la programmation de l’automate et de l’interface homme/machine.
 (image montrant l’automate câblé)
(image montrant l’automate câblé)
Conclusion : Ce projet a été très intéressant pour nous car il nous permet d’appréhender l’aspect technique d’un projet c’est à dire toute la partie câblage d’une machine et d’une armoire électrique, nous n’avons cependant pas pu réaliser la partie informatique de ce projet c’est à dire toute la partie programmation d’un automate et d’une interface homme/machine tel qu’un écran tactile mais nous avons pu expérimenter cette aspect du projet lors de travaux pratique réaliser en cours.
Nous voudrions remercier Mr Vigne, Mr Colicchio ainsi que Mr Merckle nos professeurs tuteurs sur ce projet et Mr De Sabbata responsable de l’IUT Lab, pour l’aide qu’ils nous ont fournis tout au long de ce projet.