

![]()
![]()
Sommaire
- Introduction
- Points importants
- Réalisation
- Code et rendu
- Planification
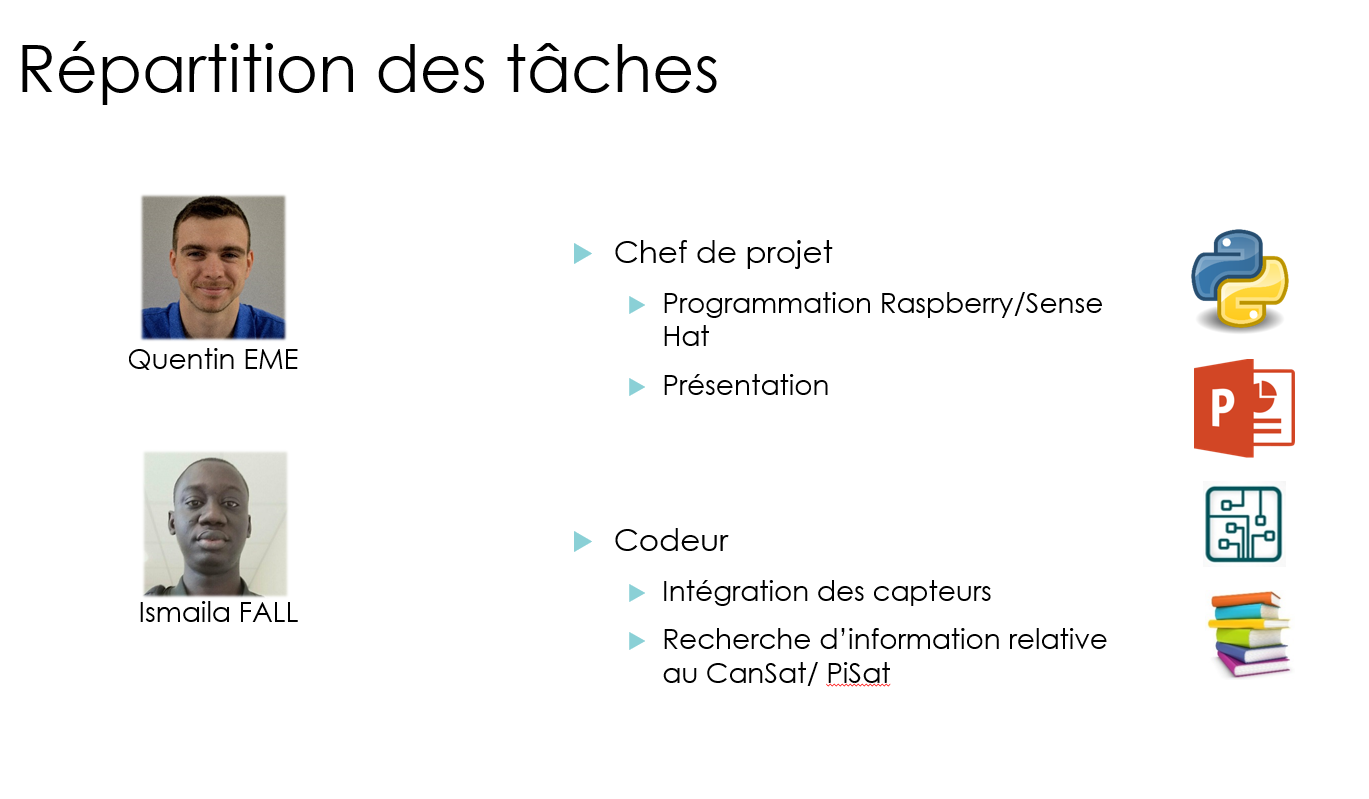
- Répartition des tâches
- Perspectives
- Point complexe et solutions envisagées
Introduction
-
Qu’est ce qu’un CanSat ?
Un CanSat (Canette-Satellite) est un dispositif autonome de faible volume (equivalent a une canette de soda de 33cl) qui réalise des missions scientifiques à très haute altitude ou en orbite. Cet appareil prend la forme d’une sonde nanosatellite cylindrique, qui est lancée par une fusée ou un ballon et qui redescend sous parachute en effectuant ses missions.
Dans notre cas nous n’allons pas lancer notre CanSat en orbite ou le larguer depuis un ballon sonde, mais nous allons le larguer depuis un parapente en vol, ceci étant plus simple à organiser.
-
Contraintes :
- Raspberry PI3
- Module émetteur/récepteur XBee
- Volume max : 1L
Objectifs
-
Crée un CanSat équipé de :
- Raspberry PI3
- Capteur ultra sons (approche)
- Caméra
- Capteur de températures, de vitesse, d’humidité et de pression
- Module émetteur/récepteur Xbee
- Système autonome (via pile/batterie)
- Test en condition réelle
- Volume minimum
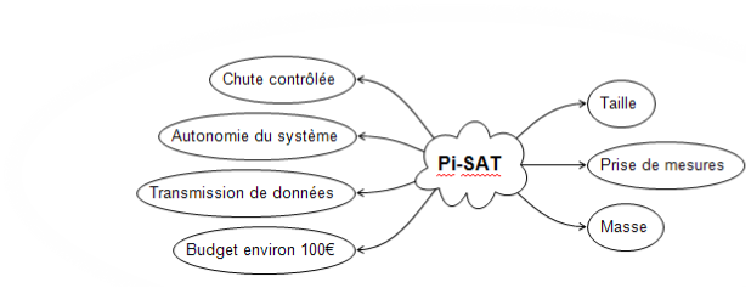
Diagramme pieuvre
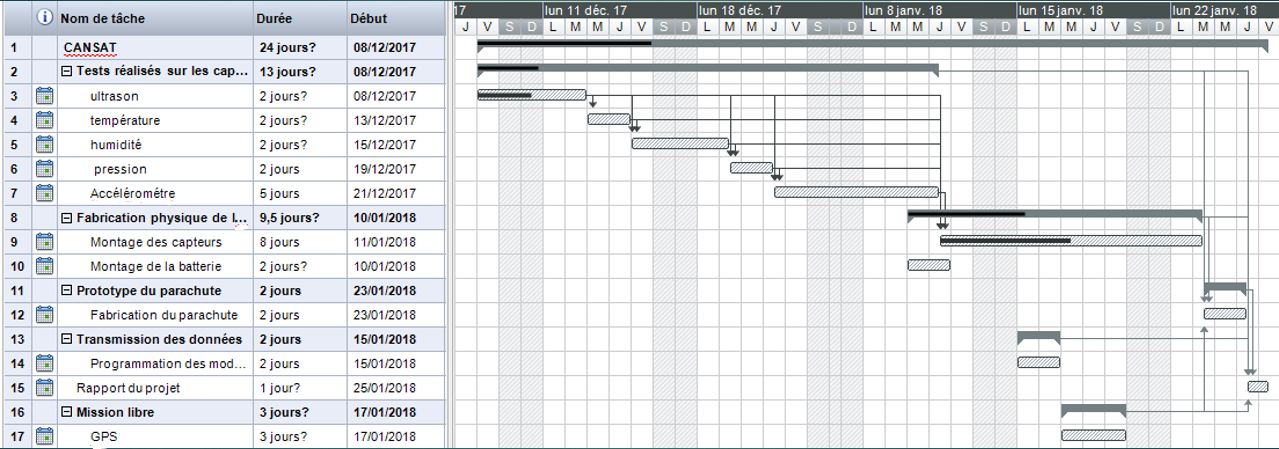
Planification
Perspective
-
Crée un CanSat équipé de :
- Raspberry PI3
- Capteur ultra sons (approche)
- Caméra
- Capteur de températures, de vitesse, d’humidité et de pression
- Module émetteur/récepteur Xbee
-
Système autonome (via pile)
-
Test en condition réelle
Réalisations
- Recherche sur les CanSat
- Apprentissage Raspberry PI/python
- Test des capteurs (ultra sons, caméra, Sense Hat …)
- Transmission des données avec les modules XBee
- Construction 3D CanSat
- Programmation du capteur ultrason
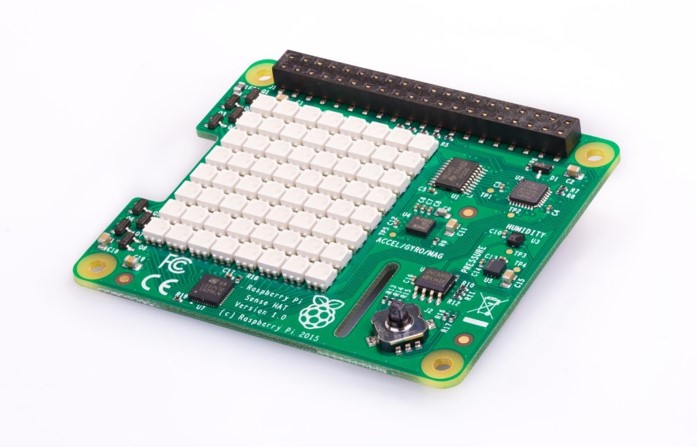
Le module Sense Hat
-
Capteur de température
-
Capteur de pression
-
Capteur d’humidité
-
Matrice LED
-
Gyroscope/accéléromètre
Transmission des données 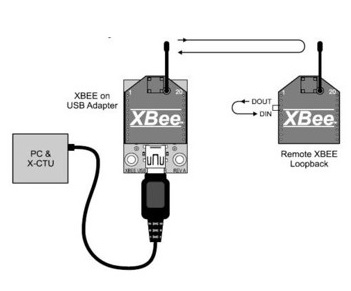
-
Deux modules XBee émetteur/récepteur
-
Logiciel XCTU
Capteur ultrason
-
Alimentation : 5Vcc
-
Portée: de 10cm à 4 m
-
Consommation :30mA
Alimentation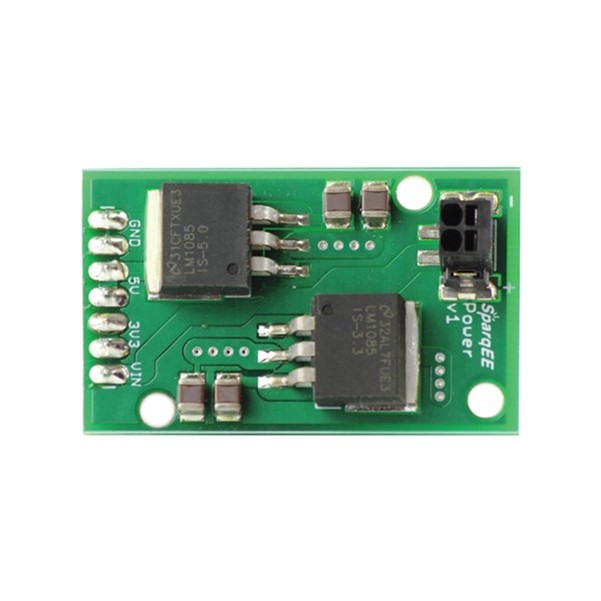
-
Power Board:
-
Deux Vcc de 5V
-
Deux Vcc de 3,3V
-
Deux Gnd
-
Entrée VIN
-
Conception 3D
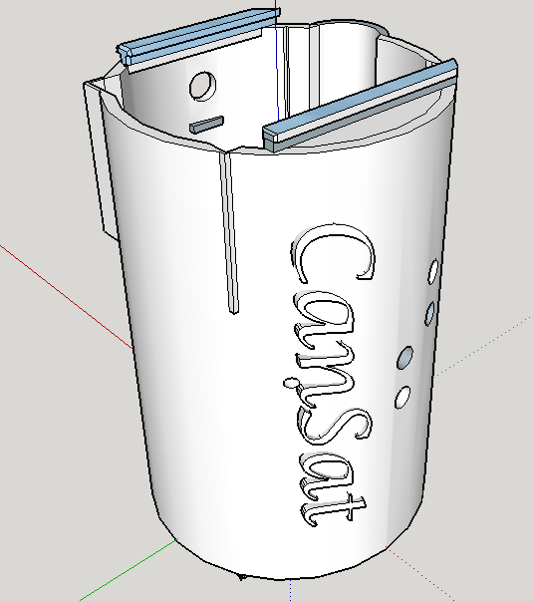
Pour la création de la structure du CanSat nous avons utiliser Sketchup car il s’agit d’un logiciel que je connaissait déjà, et nous avons utiliser l’imprimante 3D de l’IUT LAB pour le crée
Parachute
S=(2.g.M)/(R.Cx.Vd²)
g = 9,81 m·s−2
M = 1,2 kg
R = 1,21 m
Cx = 1 : coefficient de frottement
Vd = 3m/s : Taux de chute
Points complexe et solutions
-
Test des capteurs
- Début compliquer puis simplifier avec l’utilisation du Sense Hat
-
Transmission des données lors de la descente
- Utilisation de Xbee complexe
- Problème priorité entre les ports série GPIO et le bluetooth du Raspberry Pi
-
Conception 3D
- Intégration du Raspberry Pi, du Sense Hat, des capteur, … dans un volume restreint
Programmation
Le code permettant de gérer la prise de mesure a été écrit en python car il s’agit d’un langage simple et très utiliser sur Raspberry Pi.
Vous pouvez trouver le code commenter ici : Code du CanSat
Vidéo récapitulative
Remerciements
