
Rapport projet TX60
Cahier des charges
- Utilisation d’un robot six axes Stäubli TX60, équipé de son Teach et programmable via la suite logicielle Stäubli.
- Utilisation d’une caméra noir et blanc intelligente NI1722 Smart Camera, programmée via le logiciel NI Vision Builder.
- Connexion entre la caméra et le robot via une connexion Ethernet TCP.
- Le robot doit être capable de reconnaitre des pièces de différentes formes, réparties sur une surface pouvant changer de taille et/ou de position.
- Le robot ne doit pas entrer physiquement en contact avec la caméra.
- La préhension des pièces se fera au moyen d’une ventouse qu’il faudra dimensionner et adapter au robot.
Objectif du projet
Ce projet doit mettre en place une interaction entre un robot six axes Stäubli TX60 et une caméra industrielle. Le but est de retirer des pièces de différentes formes du champ de vision de la caméra, en établissant une communication entre celle-ci et le robot afin de partager les coordonnées des pièces. Le robot doit ensuite retirer les pièces du champ de vision de la caméra, en fonction d’une « recette » dictée par l’utilisateur.
La caméra
La caméra utilisée pour le projet est une NI1722 Smart Camera. L’avantage d’avoir une caméra « intelligente » est de pouvoir se passer d’un ordinateur pour le traitement des images. Ainsi la prise de vue, la reconnaissance des pièces et le calcul de leurs coordonnées se fait directement du côté de la caméra et seules les coordonnées des pièces sont envoyées au robot.
Le robot
Le robot six axes Stäubli TX60 nous permet dans ce projet de déplacer les pièces. Il communique avec la caméra industrielle via une liaison Ethernet TCP, lui permettant de récupérer les coordonnées des différentes pièces. Le Teach permettant de contrôler le robot manuellement et la suite Stäubli permet de créer et tester une bonne partie du programme directement sur un simulateur. Le programme peut aussi être modifié directement sur le Teach, mais le manque d’ergonomie le destine surtout à faire des modifications sur le terrain.
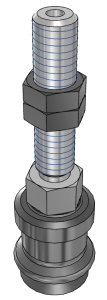
La ventouse
La ventouse, couplée à un générateur de vide type venturi, est de taille très réduite. L’avantage d’une petite ventouse est de pouvoir avoir une erreur plus importante lors du pointage des pièces par le robot. L’ensemble, monté sur un support fixé au bout du bras du robot, est relié à l’arrivée d’air via le système pneumatique du robot. La ventouse et le générateur de vide ont été acheté sur le site https://www.smc.eu/portal_ssl/webpages/01_products/products.jsp sous les références :
- ZPT10BF-A6 pour la ventouse
- ZH05DL-06-06-06 pour le générateur de vide
Le fonctionnement
Le programme permettant la manutention des pièces se résume en plusieurs étapes :
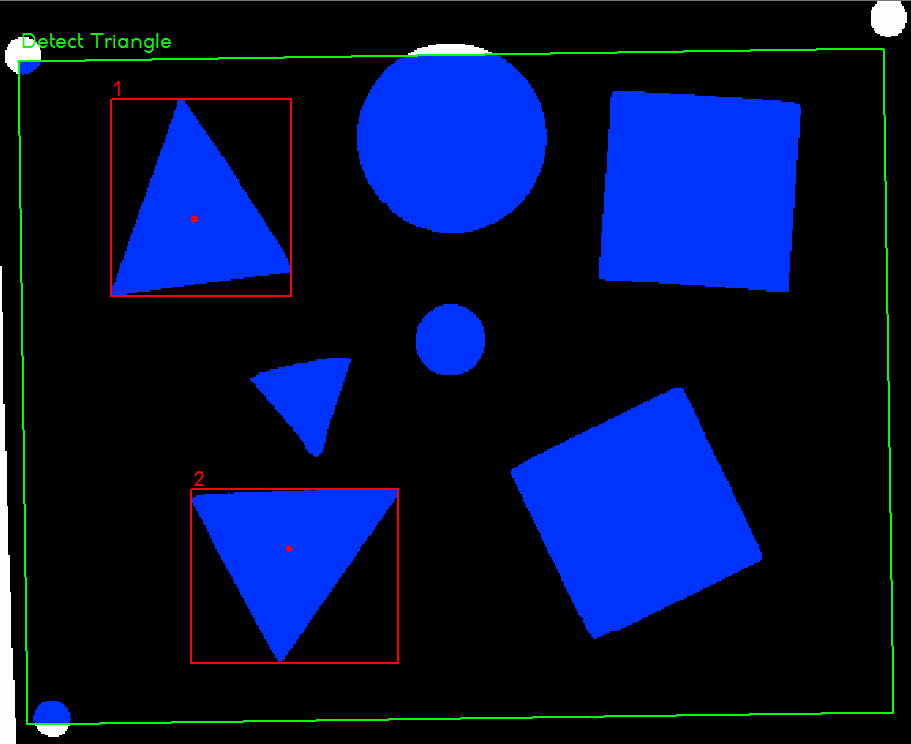
- La définition du repère caméra : le support de travail est doté de 3 points permettant de définir le repère de la caméra. Une fois le support et les trois points de repère placés dans le champ de vision de la caméra, celle-ci créé automatiquement le repère et calcule la variable permettant de faire la conversion millimètres / pixels.
Acquisition de l’image :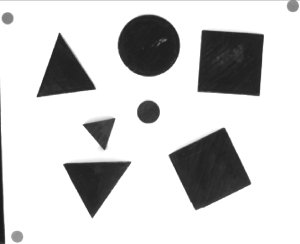
Binarisation de l’image :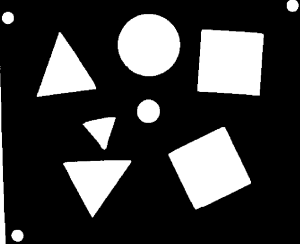 Définition du repère de la caméra :
Définition du repère de la caméra :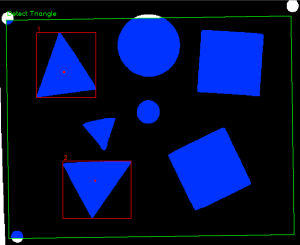
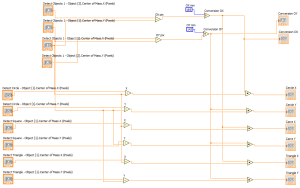
- Importation des coordonnées des pièces : pour cela, il suffit d’aller dans le menu correspondant et de sélectionner les coordonnées des pièces qui nous intéressent. Le robot va ensuite demander à la caméra de faire une prise de vue et de renvoyer les coordonnées des pièces en pixels, puis faire la conversion pixels/millimètres via une variable nConversion calculée au préalable. Les coordonnées de chaque pièce s’affichent une fois acquises par le robot.
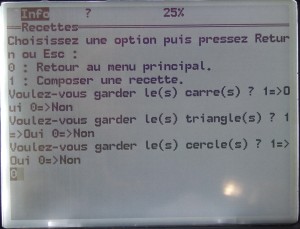
- Sélection de la « recette » : ce menu permet à l’utilisateur de choisir les pièces qu’il souhaite conserver dans le champ de vision de la caméra. Une fois que les pièces à conserver sont sélectionnées, le robot va automatiquement retirer les pièces indésirables et créer une pile de pièces pour chaque forme. Il serait aussi possible de faire l’inverse, en remplissant une boîte avec les pièces demandées par exemple. Après avoir fini sa manœuvre, le robot retourne en position initiale et attend l’acquisition de nouvelles pièces et/ou d’une nouvelle recette.
Conclusion
Ce projet nous a permis d’améliorer nos compétences sur certains points. Pour commencer, l’utilisation réelle d’une caméra industrielle apporte plusieurs manières de traiter un même problème de vision industrielle. Il faut prévoir l’éclairage, le fond sur lequel travailler en fonction de la couleur des pièces, ou encore la distance de focalisation de la caméra. La partie robotique, quoique plus facile à programmer grâce à la possibilité de faire une simulation sur le logiciel Stäubli, nous a néanmoins posé quelques problèmes de communication avec la caméra. Pour finir, nous pouvons dire que le projet pourrait être approfondi en prenant en compte la possibilité d’avoir plusieurs pièces de même forme, ou travailler en tenant compte des couleurs, ce qui nécessiterait un changement de caméra.
Projet réalisé par BOYARD André-Julien et SINGER Vincent.