Il pollo, un elemento onnipresente nelle tavole italiane e nelle campagne di tutto il Paese, ha da sempre incarnato simboli profondi che trascendono la semplice alimentazione. Dalla sua rapida corsa nelle corti rurali alle rappresentazioni artistiche, il pollo rappresenta molto più di un semplice animale da cortile. La sua presenza nella cultura italiana riflette una complessa rete di credenze, miti e tradizioni che si sono evolute nel corso dei secoli, mantenendo tuttora un ruolo importante nel tessuto sociale del Paese. Per approfondire le radici di questo simbolismo, si può tornare alla nostra introduzione, visitando l’articolo La velocità dei polli domestici e il loro ruolo nella cultura italiana, che costituisce il punto di partenza per un viaggio tra tradizione e innovazione.
1. Origini e radici storiche del simbolismo del pollo nella cultura italiana
a. Le prime rappresentazioni e credenze popolari
Le prime testimonianze del simbolismo del pollo si trovano nelle antiche civiltà italiche e nelle ruralità pre-romane, dove l’animale era spesso associato a riti agrari e di fertilità. Nei villaggi e nelle campagne, il pollo rappresentava un segno di prosperità, poiché la sua rapida crescita e riproduzione simboleggiavano abbondanza e buona sorte. Le credenze popolari attribuivano inoltre al pollo il potere di scacciare gli spiriti maligni, rendendolo un elemento chiave nelle pratiche di protezione domestica.
b. Il pollo come simbolo in miti e leggende regionali
In molte regioni italiane, il pollo compare in miti e leggende locali come simbolo di rinascita e di forza. Per esempio, in alcune tradizioni della Toscana, si narra di un pollo che predice il buon raccolto, mentre nel Sud Italia il suo canto è considerato un segnale di buona sorte imminente. Questi racconti sottolineano come il pollo abbia sempre rappresentato un ponte tra il mondo terreno e quello spirituale, assumendo così un valore simbolico di collegamento tra l’uomo e l’invisibile.
c. L’evoluzione del suo significato nel corso dei secoli
Nel corso dei secoli, il simbolismo del pollo si è evoluto, passando da un elemento di superstizione e fertilità a un simbolo più complesso di rinascita, sacrificio e protezione. Durante il Medioevo, ad esempio, il pollo veniva frequentemente rappresentato in dipinti religiosi come simbolo di purezza e di sacrificio, anticipando il suo ruolo come simbolo di resurrezione nelle festività cristiane.
2. Il pollo come simbolo di fertilità e prosperità nelle tradizioni italiane
a. Riti e festività legati alla fecondità
In molte zone dell’Italia, specialmente nel Sud, i riti legati alla fertilità prevedevano l’uso di polli come simbolo di fecondità. Durante le festività primaverili, era comune offrire un pollo come dono agli dei o agli spiriti protettori della terra, sperando in un raccolto abbondante e in una buona salute per le famiglie. Questi riti si sono tramandati nel tempo, mantenendo il pollo come simbolo di vita nuova e di prosperità.
b. Significati simbolici nelle celebrazioni agricole e religiose
Le celebrazioni agricole, come le fiere e le processioni, spesso includono la benedizione dei polli e altri animali da cortile, ritenuti portatori di buona sorte. La benedizione del pollo rappresenta un gesto di rispetto verso la natura e un atto di buon auspicio per l’anno a venire. In alcune comunità rurali, il pollo benedetto viene poi inserito nelle case o nel pollaio come talismano di fortuna.
c. L’uso del pollo nelle pratiche di buon auspicio e benedizione
Oltre alle cerimonie pubbliche, il pollo ha trovato impiego anche in pratiche private di buon auspicio. Ad esempio, in alcune regioni italiane, si crede che offrire un pollo durante le festività può portare prosperità e allontanare le cattive energie. Questa tradizione si combina spesso con preghiere e rituali di purificazione, che rafforzano il ruolo del pollo come simbolo di protezione e abbondanza.
3. Il pollo nella simbologia religiosa e spirituale italiana
a. Riferimenti nel cristianesimo e nelle iconografie sacre
Nel cristianesimo, il pollo è spesso associato al tema della vigilanza e della fedeltà, grazie anche alla sua fama di cantare all’alba, simbolo di luce e speranza. Nelle icone sacre, il pollo appare talvolta come simbolo di Cristo, rappresentando la rinascita e la vittoria sulla morte. La sua presenza simbolica si evidenzia anche nelle raffigurazioni di scene evangeliche in cui il gallo canta al tradimento di Pietro, ricordando la vigilanza spirituale.
b. Il pollo come simbolo di rinascita e resurrezione nelle festività cristiane
Durante la Settimana Santa e altre festività religiose, il pollo rappresenta la rinascita spirituale e la vittoria sulla morte. La sua capacità di risvegliarsi ogni giorno all’alba lo rende un potente simbolo di resurrezione, che si collega alle celebrazioni di Pasqua, in cui si celebra la vittoria della vita sulla morte attraverso la resurrezione di Cristo.
c. Significati esoterici e superstiziosi associati al pollo
In ambito esoterico, il pollo è considerato un animale di protezione, capace di scacciare le energie negative. Le superstizioni italiane attribuiscono al suo canto il potere di allontanare gli spiriti maligni, mentre il suo sangue o le sue piume vengono usati in rituali di purificazione. Questi usi testimoniano come il pollo continui ad essere percepito come un simbolo di difesa spirituale e di buona sorte.
4. Il ruolo del pollo nel folklore e nelle tradizioni popolari delle diverse regioni italiane
a. Varianti regionali e storie locali
Le tradizioni legate al pollo variano molto tra le diverse regioni italiane. Ad esempio, in Piemonte, si narra di un pollo che predice il tempo e i raccolti, mentre in Sicilia il suo canto è considerato un segnale di buona fortuna in occasioni importanti. Questi racconti testimoniano come il pollo sia radicato nel folklore locale, assumendo caratteristiche simboliche uniche a seconda del contesto culturale.
b. Racconti e leggende che attribuiscono poteri simbolici al pollo
Numerose leggende italiane attribuiscono al pollo poteri magici, come quello di attirare la prosperità o di proteggere gli abitanti da malefici. In alcune storie, il pollo diventa un guardiano della casa, capace di avvertire i proprietari di eventuali pericoli o di portare fortuna a chi lo possiede.
c. Il pollo come protagonista di racconti e proverbi
Il pollo è spesso protagonista di proverbi e detti popolari italiani, come « Chi dorme, non piglia polli » o « Meglio un pollo oggi che un’aquila domani », che riflettono l’importanza simbolica e pratica che gli si attribuisce. Questi detti racchiudono saggezza popolare e testimoniano quanto il pollo sia stato e continui ad essere parte integrante dell’immaginario collettivo.
5. Il simbolismo del pollo nelle arti visive e nella letteratura italiana
a. Rappresentazioni artistiche e pittoriche del pollo come simbolo
Nel corso dei secoli, artisti italiani hanno raffigurato il pollo in numerose opere, spesso come simbolo di vigilanza, sacrificio o rinascita. Nelle pitture religiose del Rinascimento, il pollo compare come elemento simbolico nelle scene di passione e resurrezione, rafforzando il suo ruolo di messaggero tra il visibile e l’invisibile.
b. Il pollo nelle fiabe, nelle poesie e nei racconti popolari
Nella letteratura popolare e nelle fiabe italiane, il pollo rappresenta spesso un personaggio di saggezza o di magia, capace di portare fortuna o di svelare segreti nascosti. La figura del pollo magico è presente in molte storie, come simbolo di speranza e di rivelazione.
c. Analisi di opere letterarie che sottolineano il valore simbolico
Opere di autori italiani hanno spesso utilizzato il pollo come metafora di vigilanza, sacrificio e rinascita. Ad esempio, in alcune poesie del Risorgimento, il canto del gallo rappresenta la speranza di un’Italia libera e risorta, un simbolo di unità e rinascita nazionale.
6. La transizione dal simbolismo tradizionale alla modernità: interpretazioni contemporanee del pollo
a. Nuovi significati attribuiti al pollo nel contesto culturale odierno
Nel mondo contemporaneo, il pollo ha assunto anche ruoli simbolici legati alla sostenibilità, al rispetto per l’ambiente e alla responsabilità etica. La crescente attenzione alle pratiche di allevamento e alla produzione alimentare ha portato a considerare il pollo come simbolo di scelte alimentari consapevoli e sostenibili.
b. La presenza del pollo nel design, nella moda e nella cultura pop italiana
In campo artistico e commerciale, il pollo è stato reinterpretato in chiave moderna, diventando elemento decorativo nel design italiano e simbolo di autenticità e tradizione rivisitata. Nella moda, alcune collezioni italiane hanno utilizzato immagini di polli come simbolo di rusticità e genuinità, richiamando le radici rurali del Paese.
c. Il ruolo del pollo come simbolo di sostenibilità e rispetto per l’ambiente
Oggi, il pollo rappresenta anche un simbolo di impegno ecologico e sostenibilità. La crescente diffusione di allevamenti biologici e di pratiche agricole etiche ha portato il pollo a diventare un emblema di rispetto per la biodiversità e per il benessere degli animali, riflettendo un nuovo modo di interpretare il suo ruolo simbolico nel contesto moderno.
7. Conclusione: il ritorno al ruolo del pollo nella cultura italiana e il suo significato nella società moderna
a. Sintesi dei principali aspetti simbolici analizzati
Dall’antichità ai giorni nostri, il pollo ha mantenuto un ruolo di rilievo nella cultura italiana, rappresentando fertilità, rinascita, protezione e prosperità. La sua presenza nelle tradizioni religiose, popolari e artistiche testimonia una simbologia che si è adattata nel tempo, mantenendo intatta la sua forza evocativa.
b. La continuità tra tradizione e innovazione nel simbolismo del pollo
Se da un lato il pollo resta un simbolo radicato nelle tradizioni più antiche, dall’altro si apre a interpretazioni moderne legate alla sostenibilità e alla cultura di massa. Questa continuità dimostra come il simbolo possa evolversi senza perdere la sua essenza, diventando un ponte tra passato e presente.
c. Riflessioni sul suo ruolo come ponte tra passato e presente nella cultura italiana
Il pollo, con tutto il suo bagaglio simbolico, continua a essere un elemento che unisce le generazioni, riflettendo valori di vita, speranza e rispetto per la natura. La sua capacità di adattarsi ai mutamenti sociali e culturali lo rende un simbolo vivo, capace di parlare sia alle tradizioni più antiche che alle esigenze della società moderna.
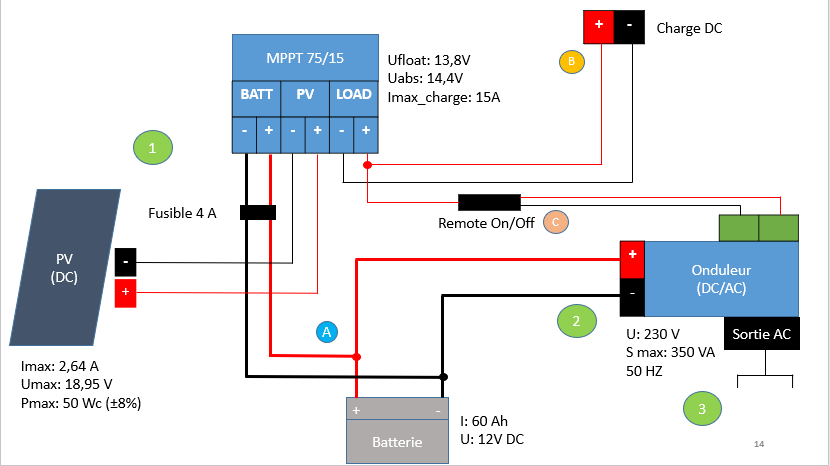


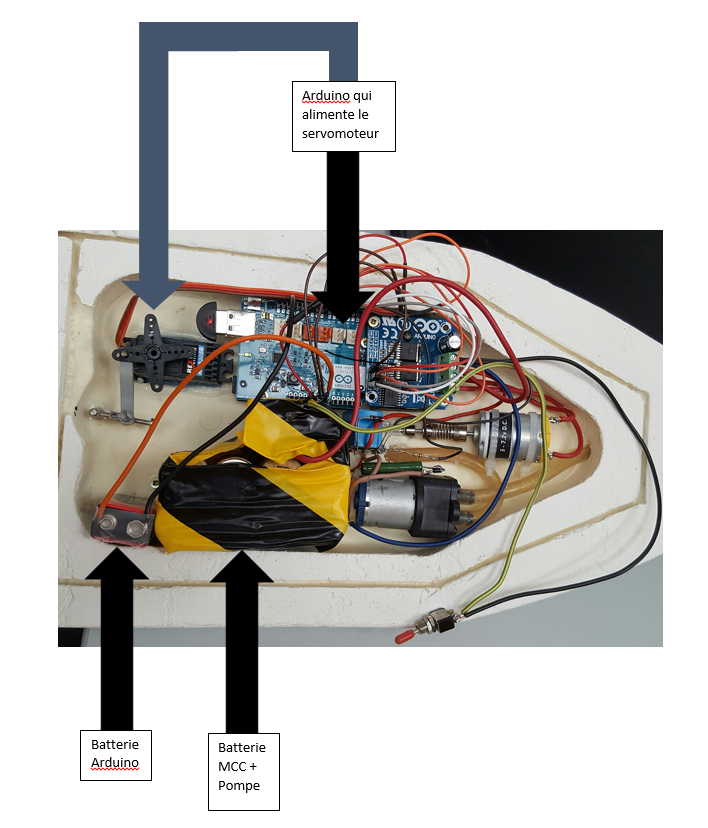
 Batterie 12 V 60 Ah AGM de la marque Victron
Batterie 12 V 60 Ah AGM de la marque Victron






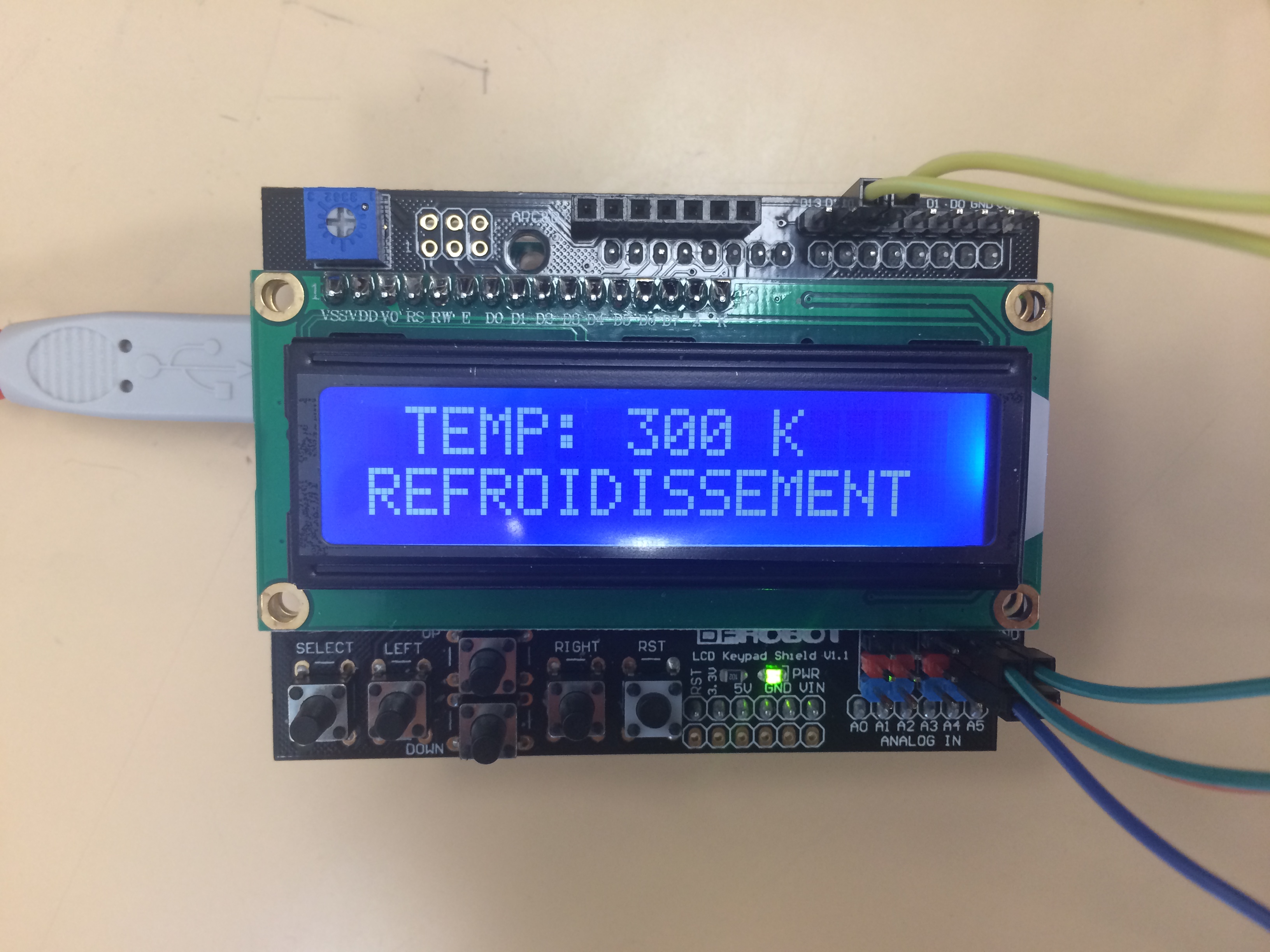
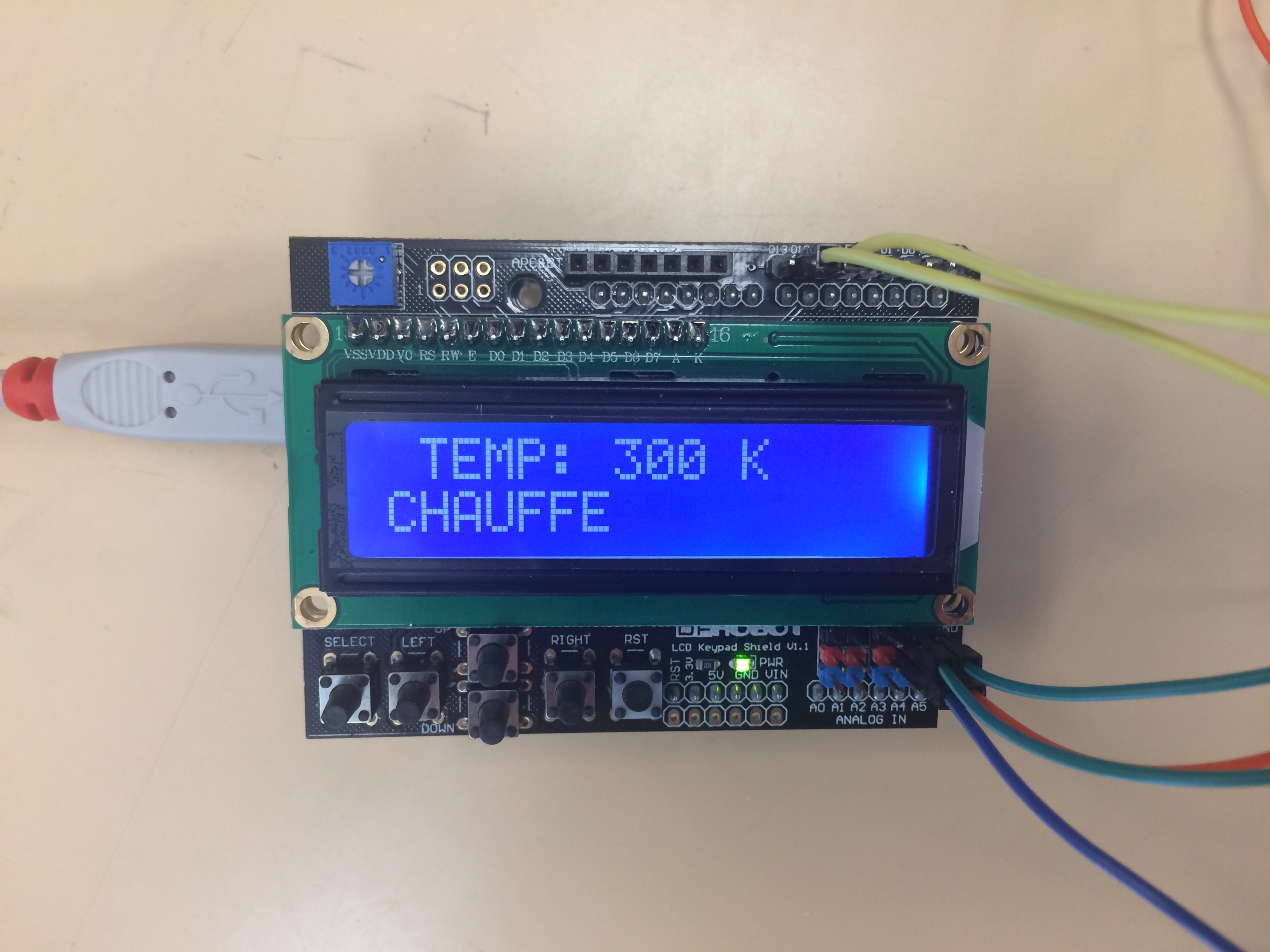
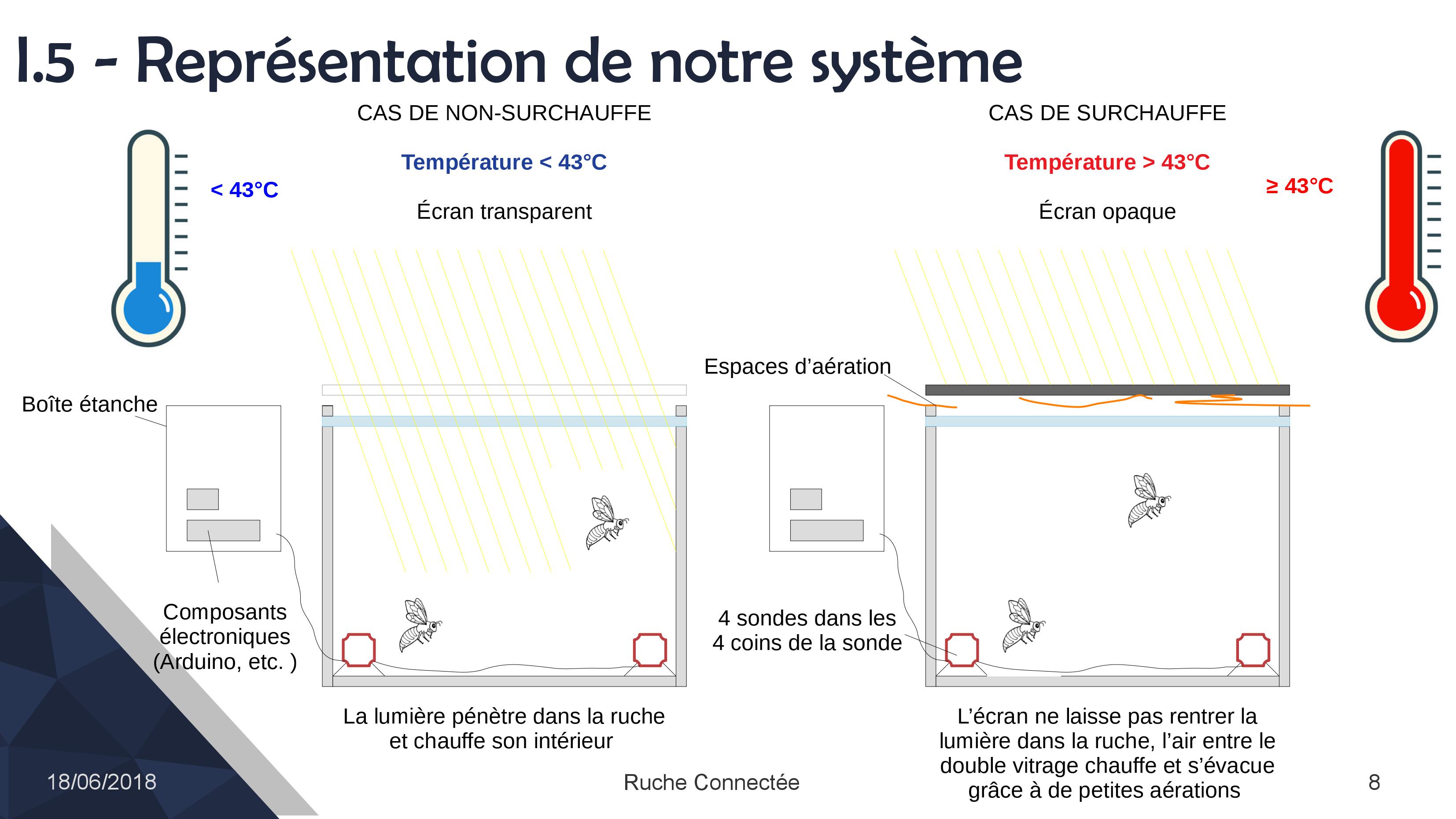
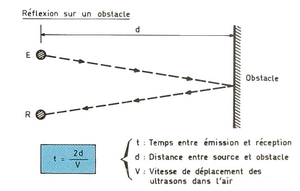
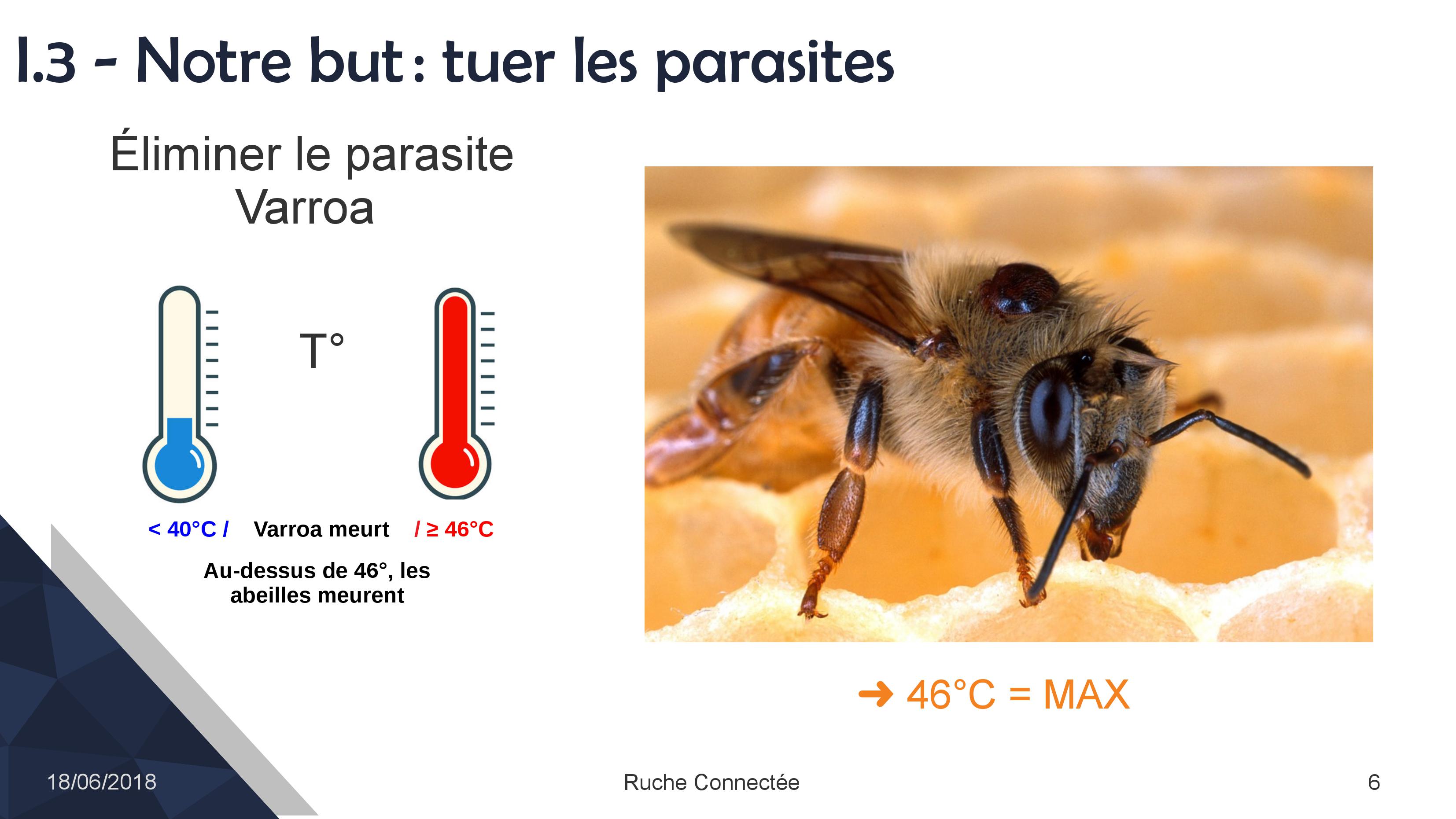 Le Varroa ne supporte pas les températures supérieures à 40°C, nous donc élever notre température au-delà de ce seuil. Toutefois, les abeilles, elles, ne supportent pas les températures supérieures à 46°C.
Le Varroa ne supporte pas les températures supérieures à 40°C, nous donc élever notre température au-delà de ce seuil. Toutefois, les abeilles, elles, ne supportent pas les températures supérieures à 46°C.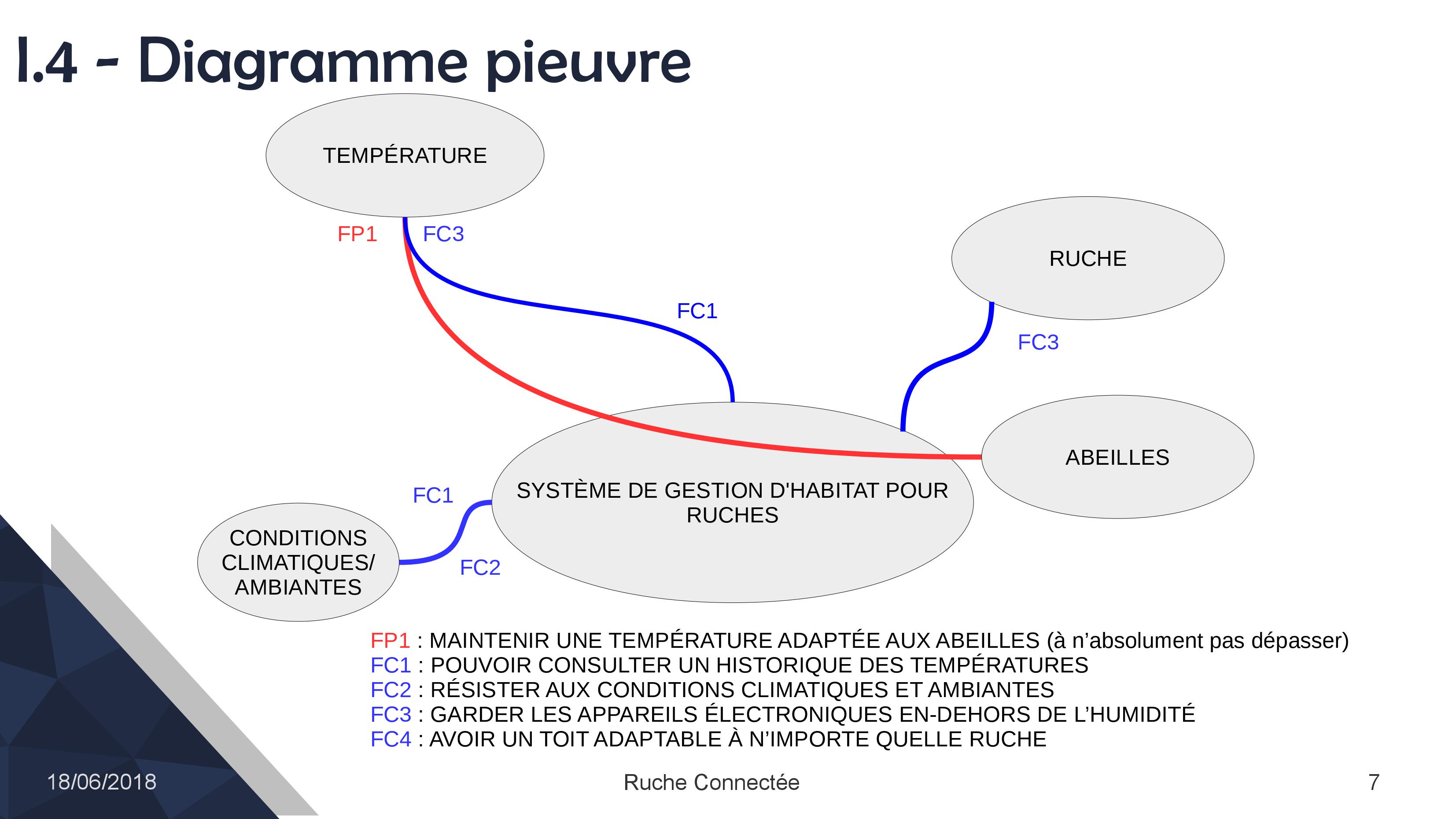
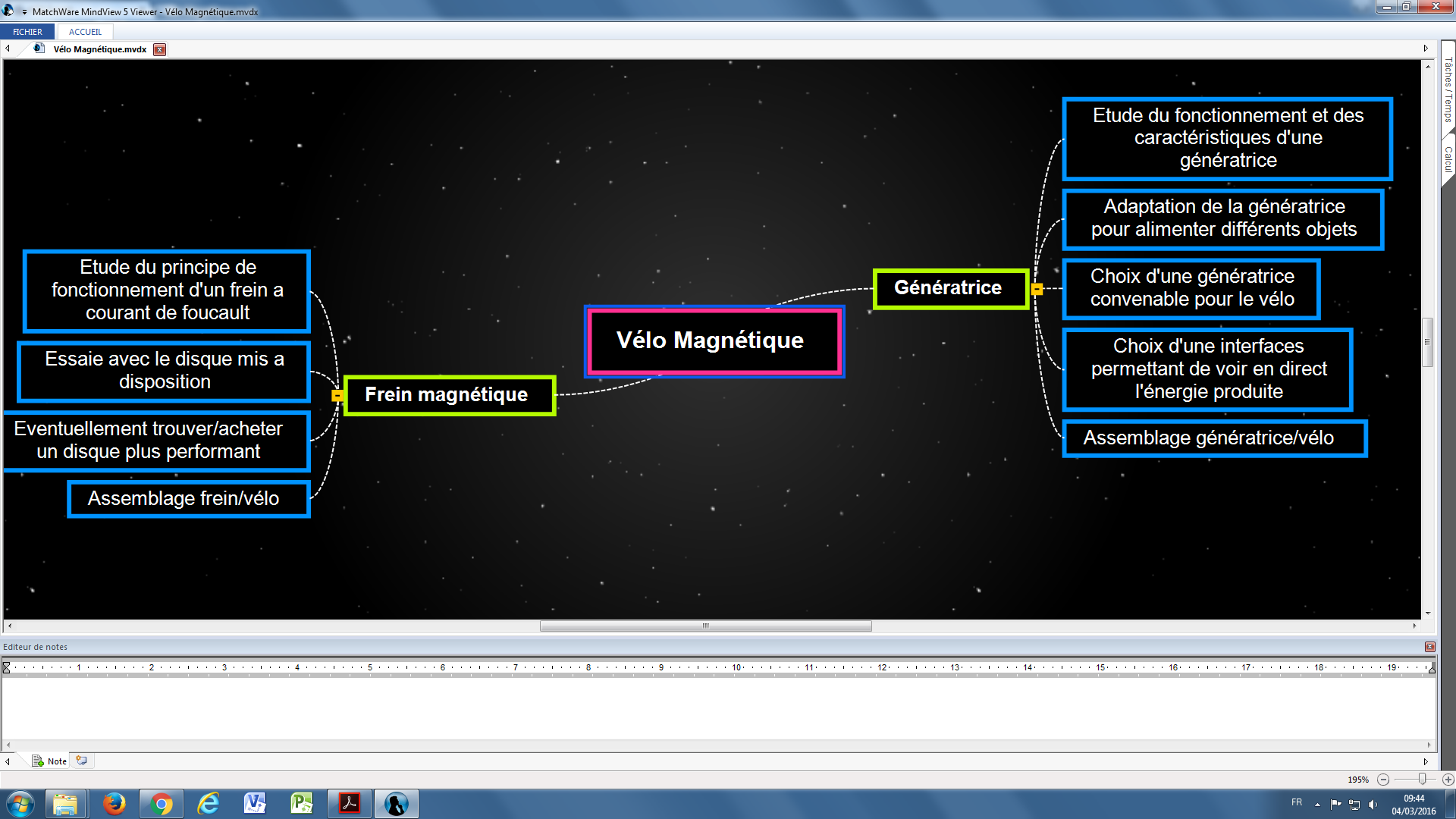
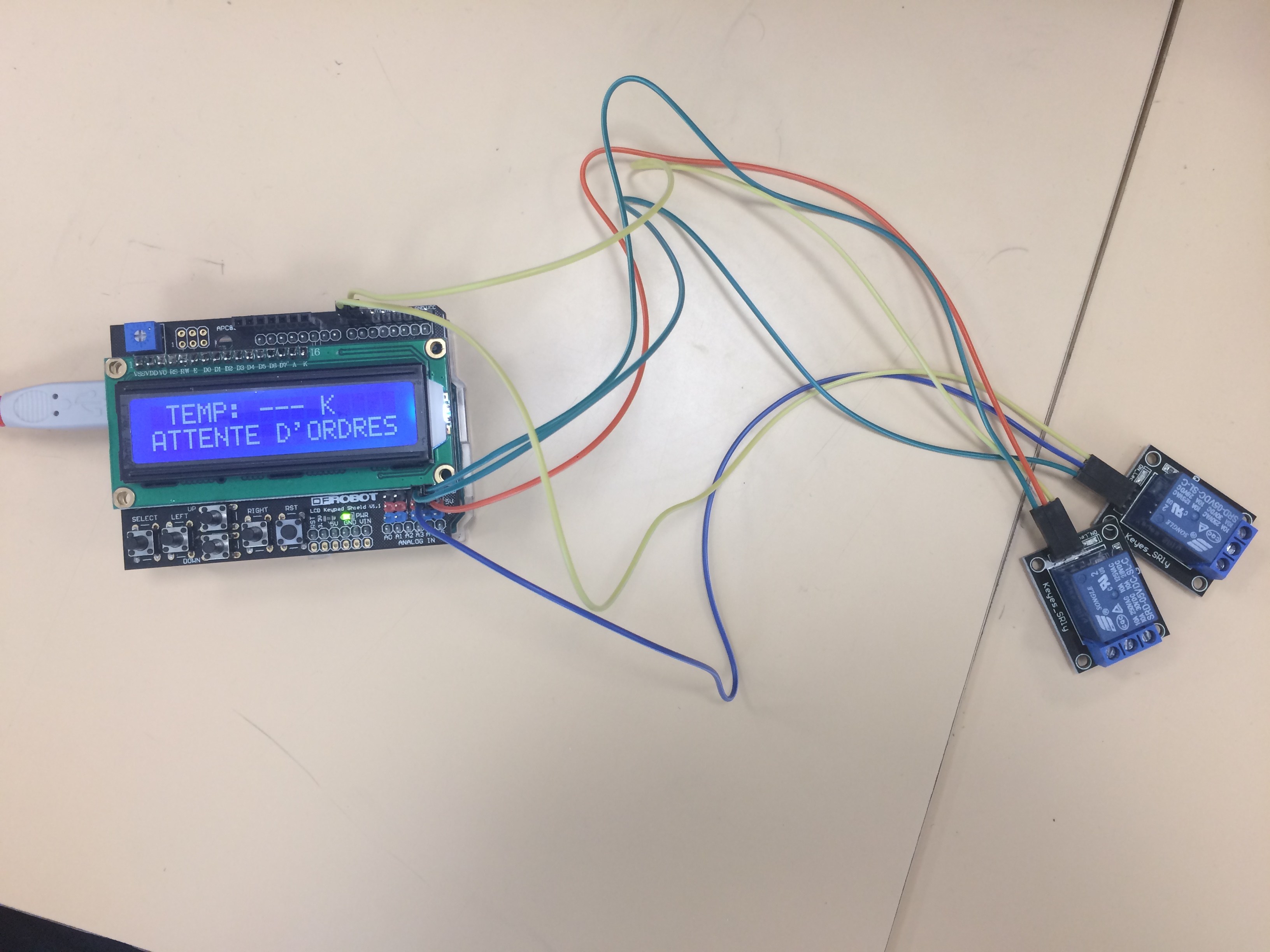
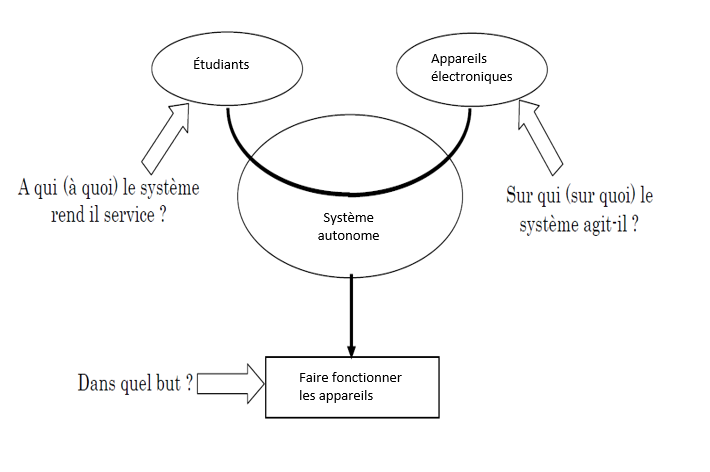
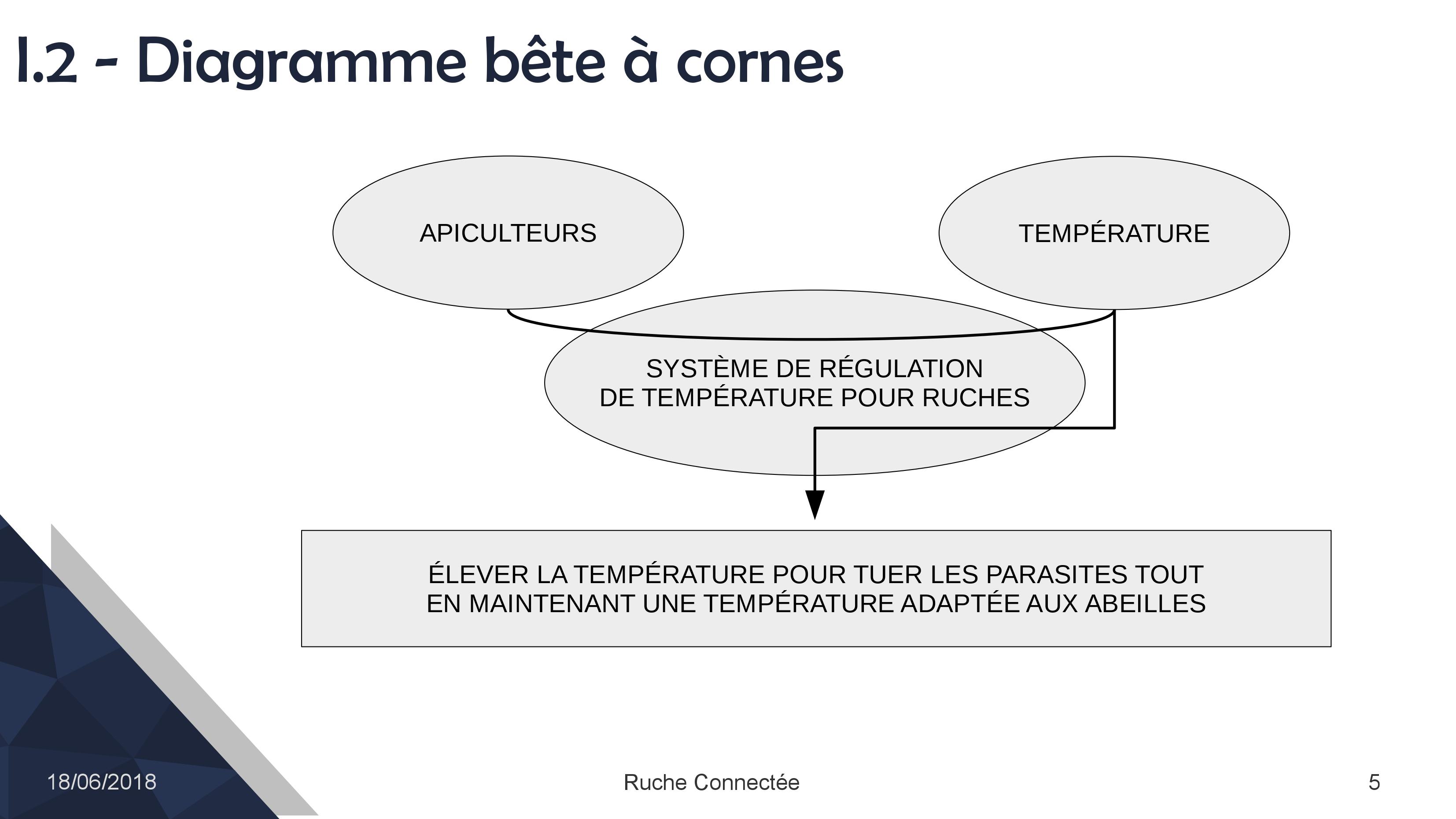
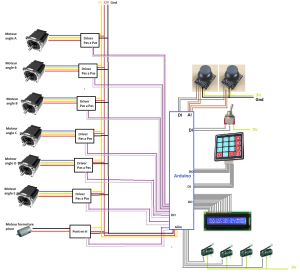
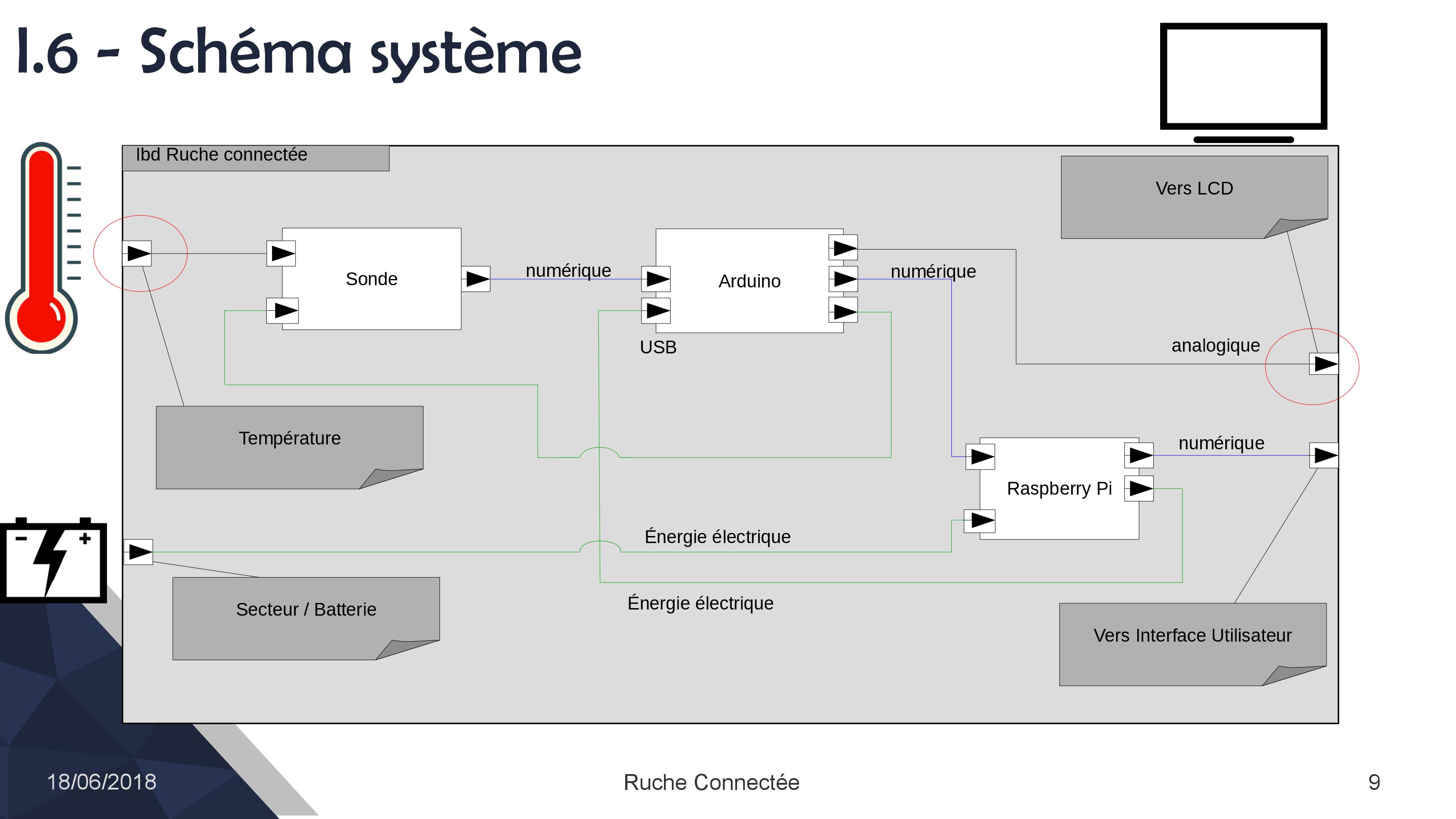 Ci-dessus, le schéma général de notre système, détaillant les divers composants de notre système ainsi que leur rôle et les liaisons les reliant.Ci-dessus est le schéma électrique des sondes de température
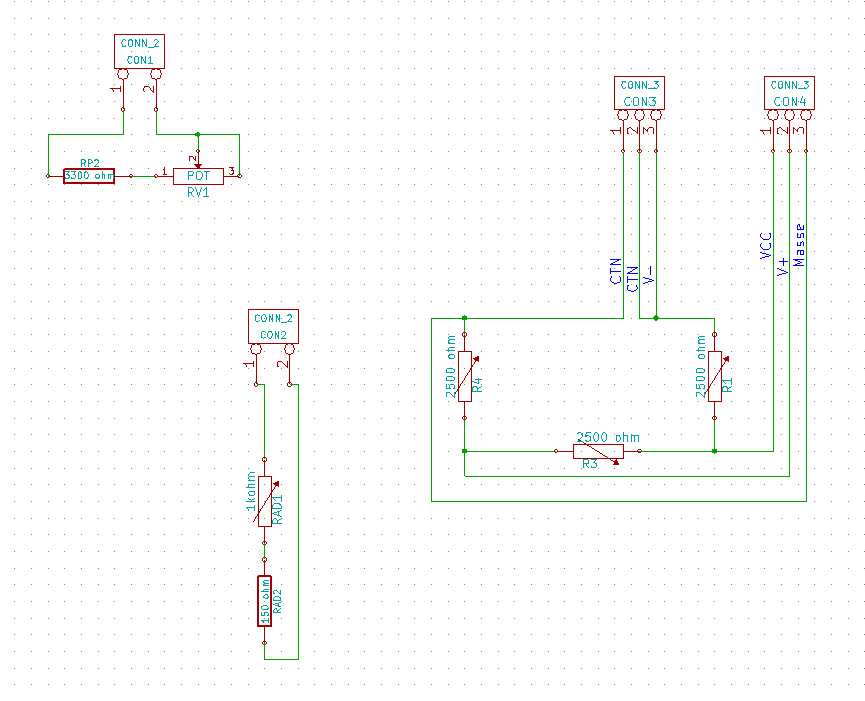
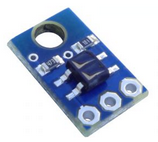
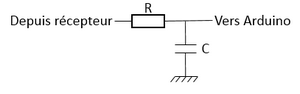
Ci-dessus, le schéma général de notre système, détaillant les divers composants de notre système ainsi que leur rôle et les liaisons les reliant.Ci-dessus est le schéma électrique des sondes de température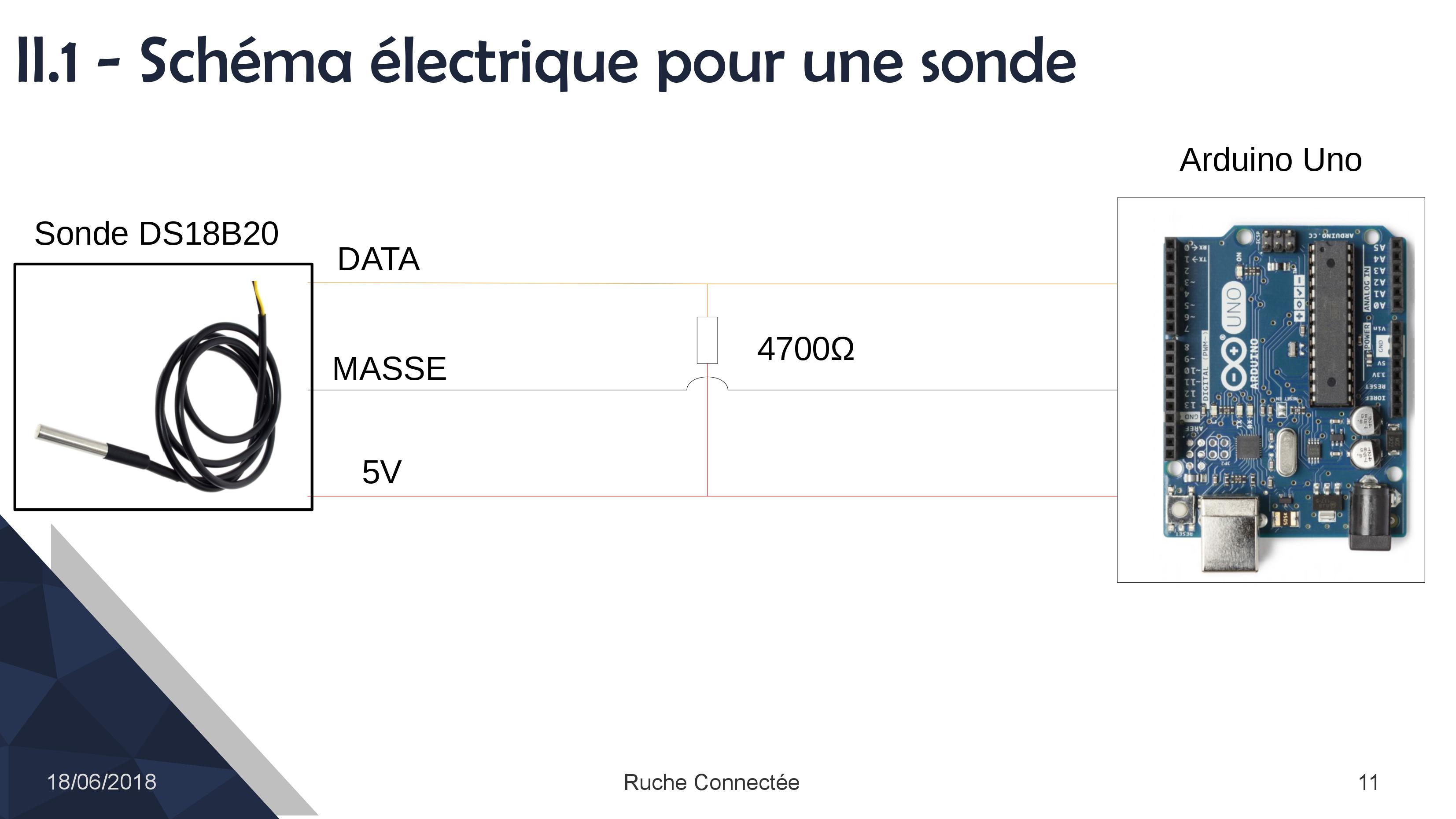 Ci-dessus est le schéma électrique des sondes de température que nous allons utiliser.
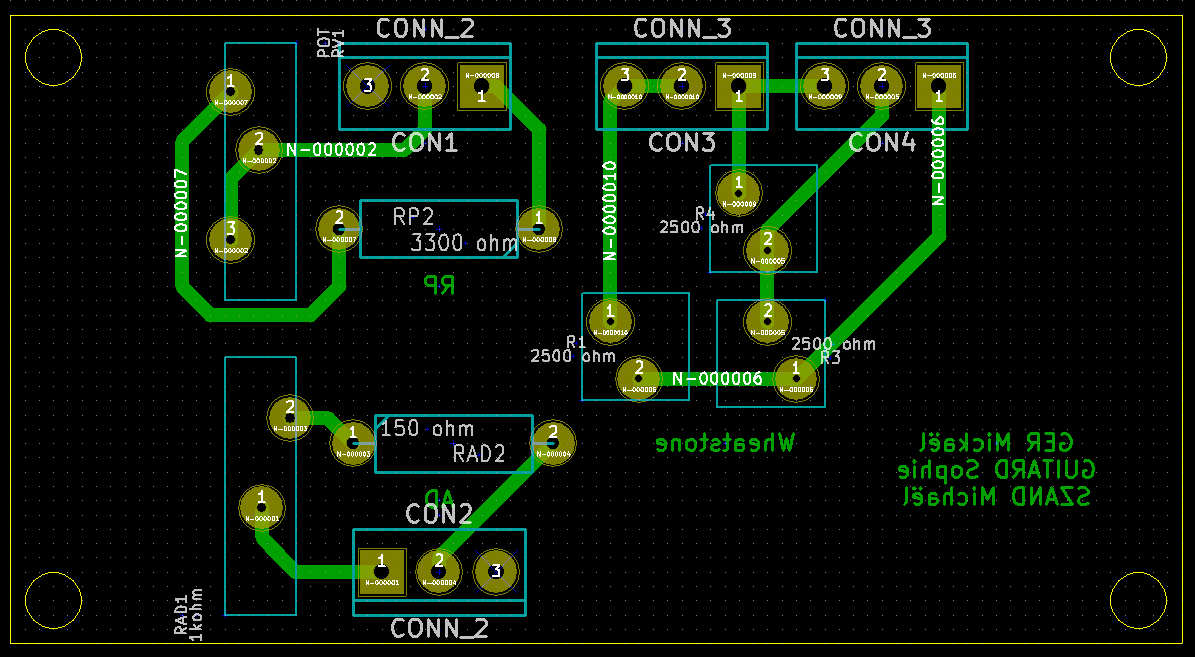
Ci-dessus est le schéma électrique des sondes de température que nous allons utiliser.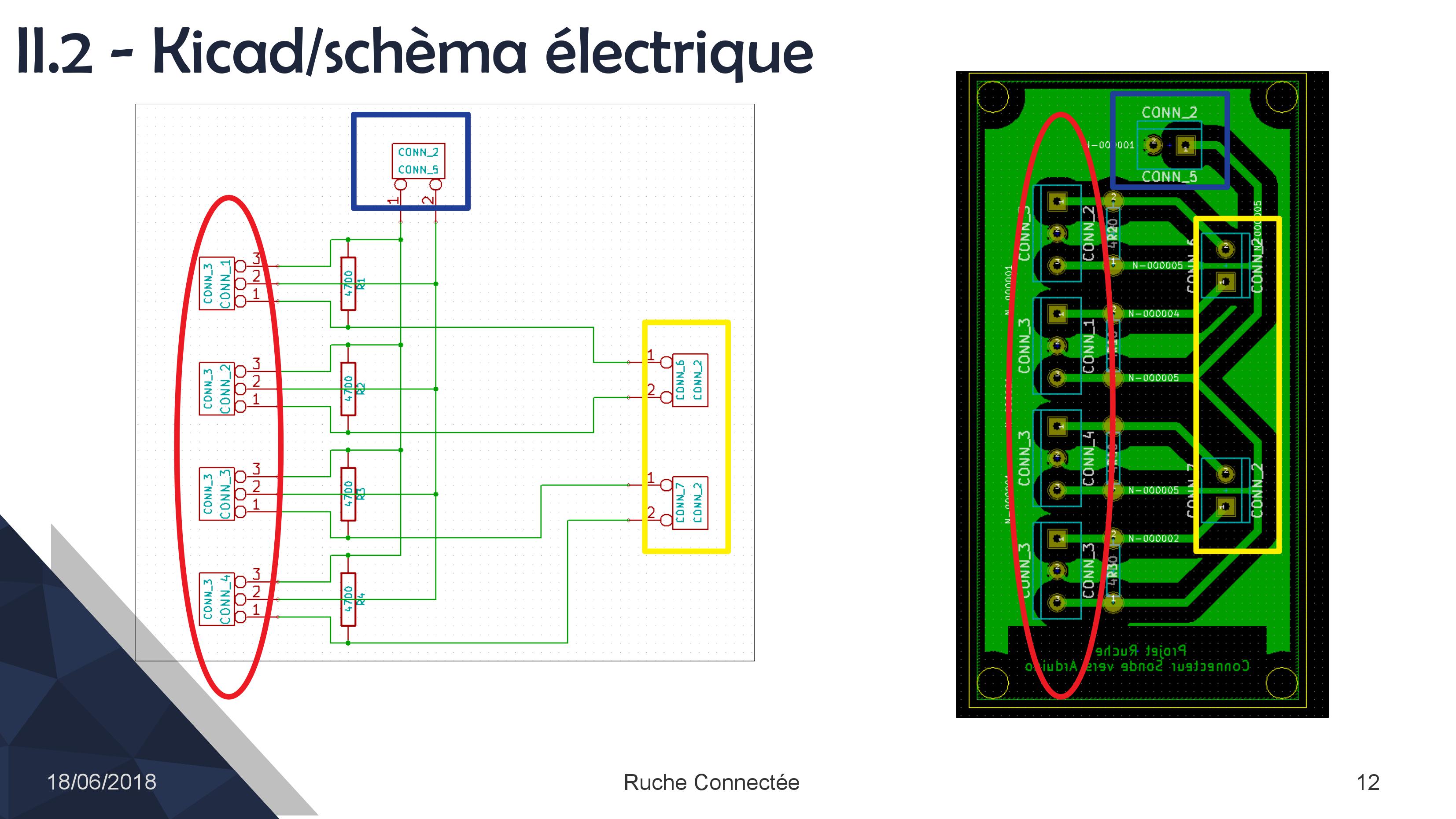 Nous avons réalisé une carte d’alimentation permettant de relier nos quatre sondes de températures à la carte Arduino. Ci-dessus sont les schémas électriques réalisés sur Kicad, ainsi que le schéma du circuit imprimé correspondant.
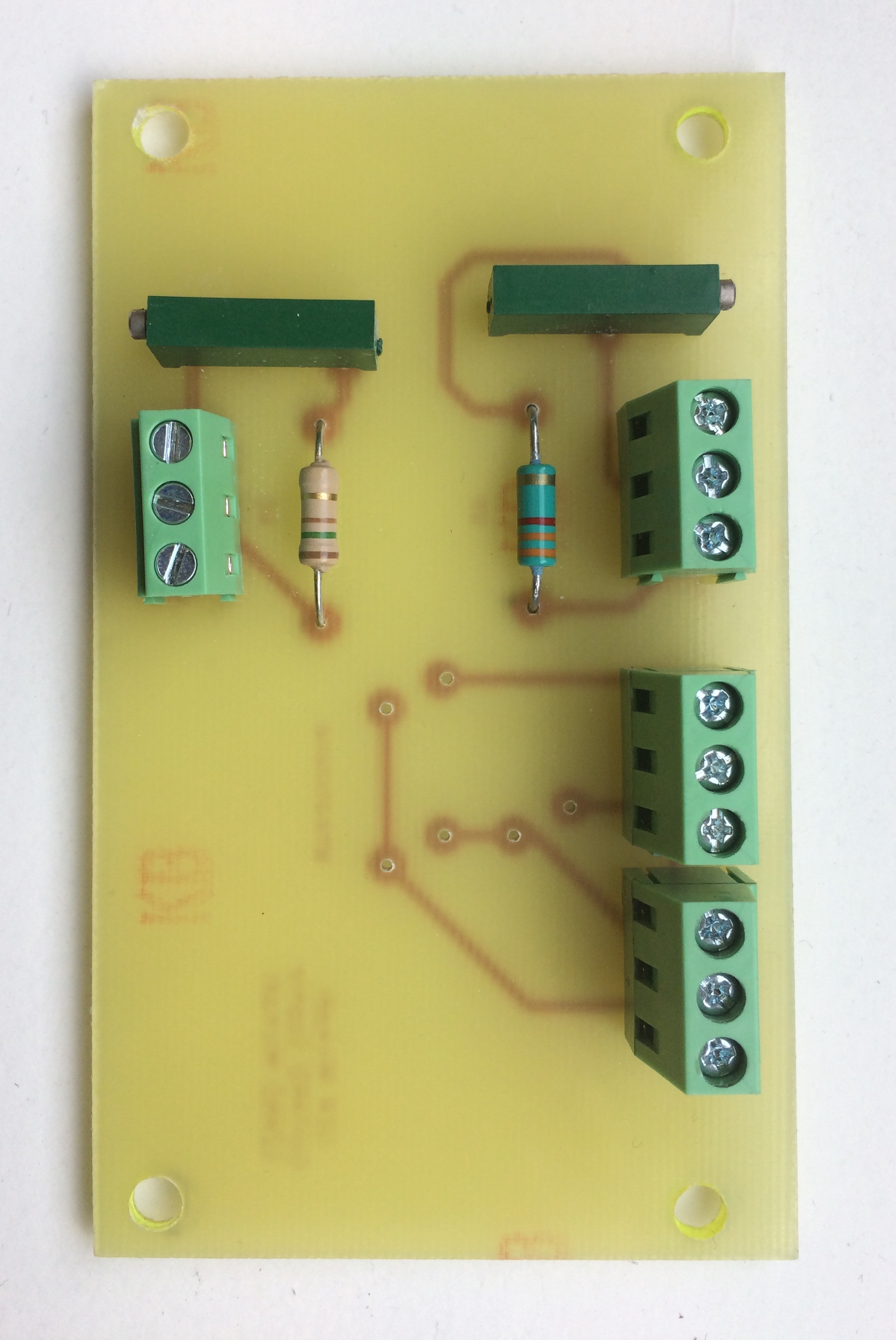
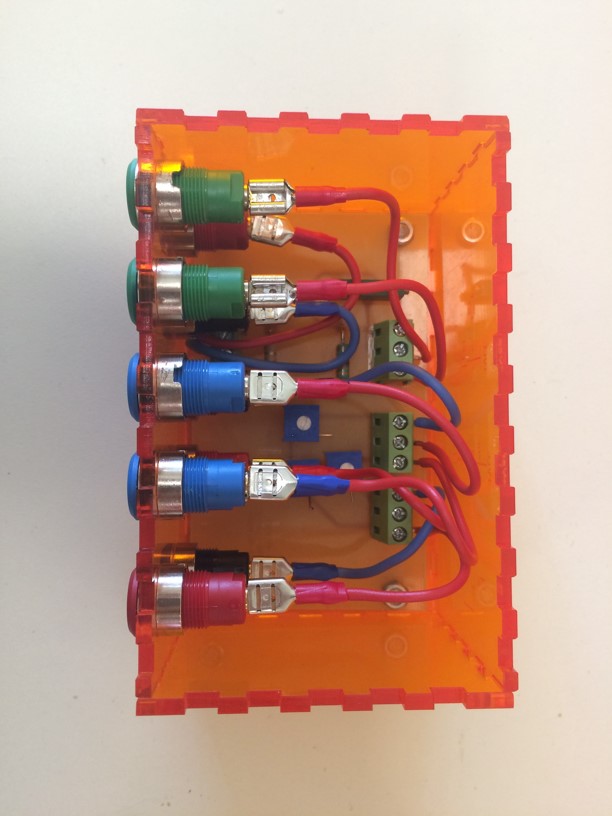
Nous avons réalisé une carte d’alimentation permettant de relier nos quatre sondes de températures à la carte Arduino. Ci-dessus sont les schémas électriques réalisés sur Kicad, ainsi que le schéma du circuit imprimé correspondant.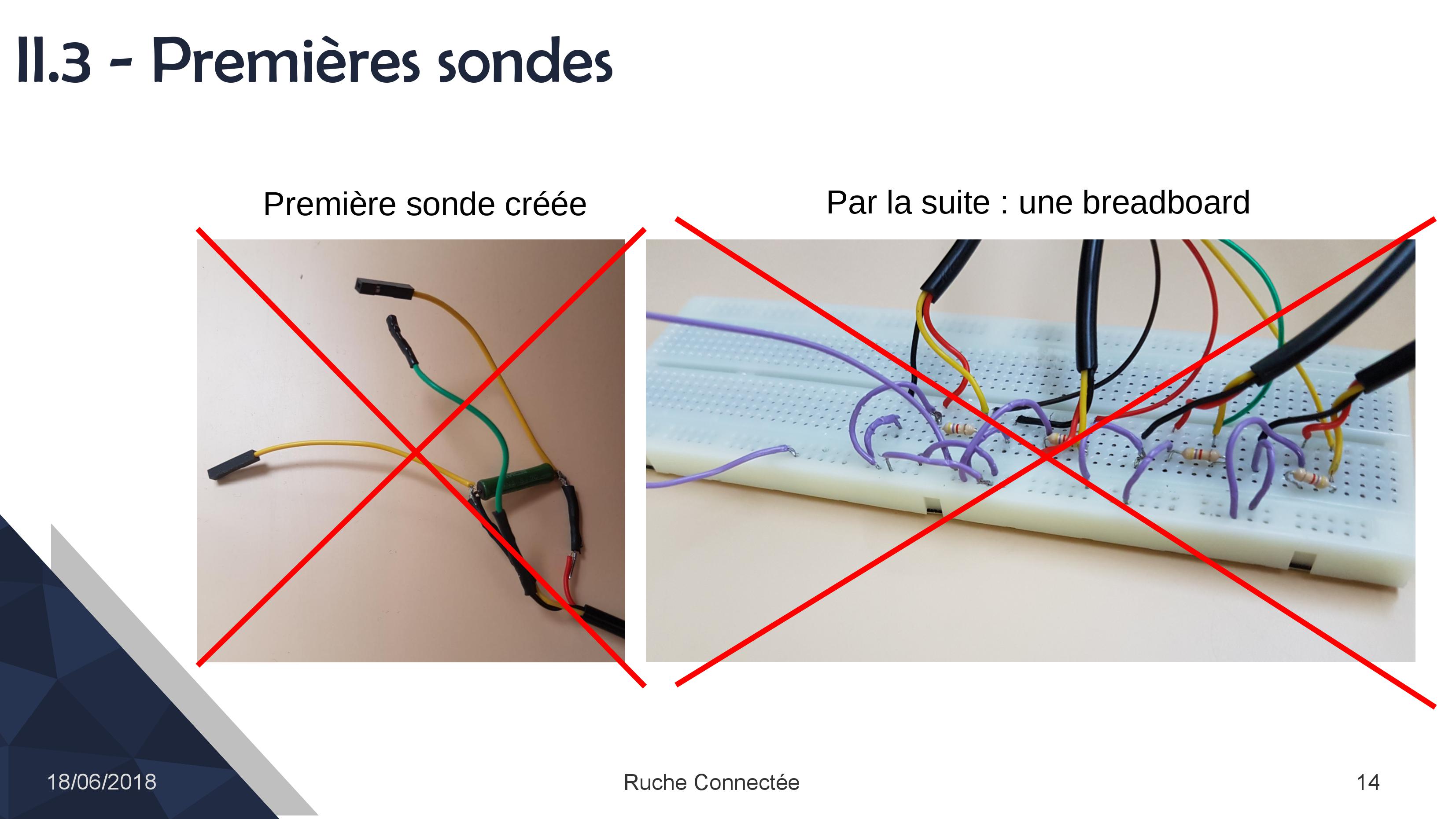 Ci-dessus vous pouvez voir nos premières tentatives pour connecter nos sondes à la carte Arduino.
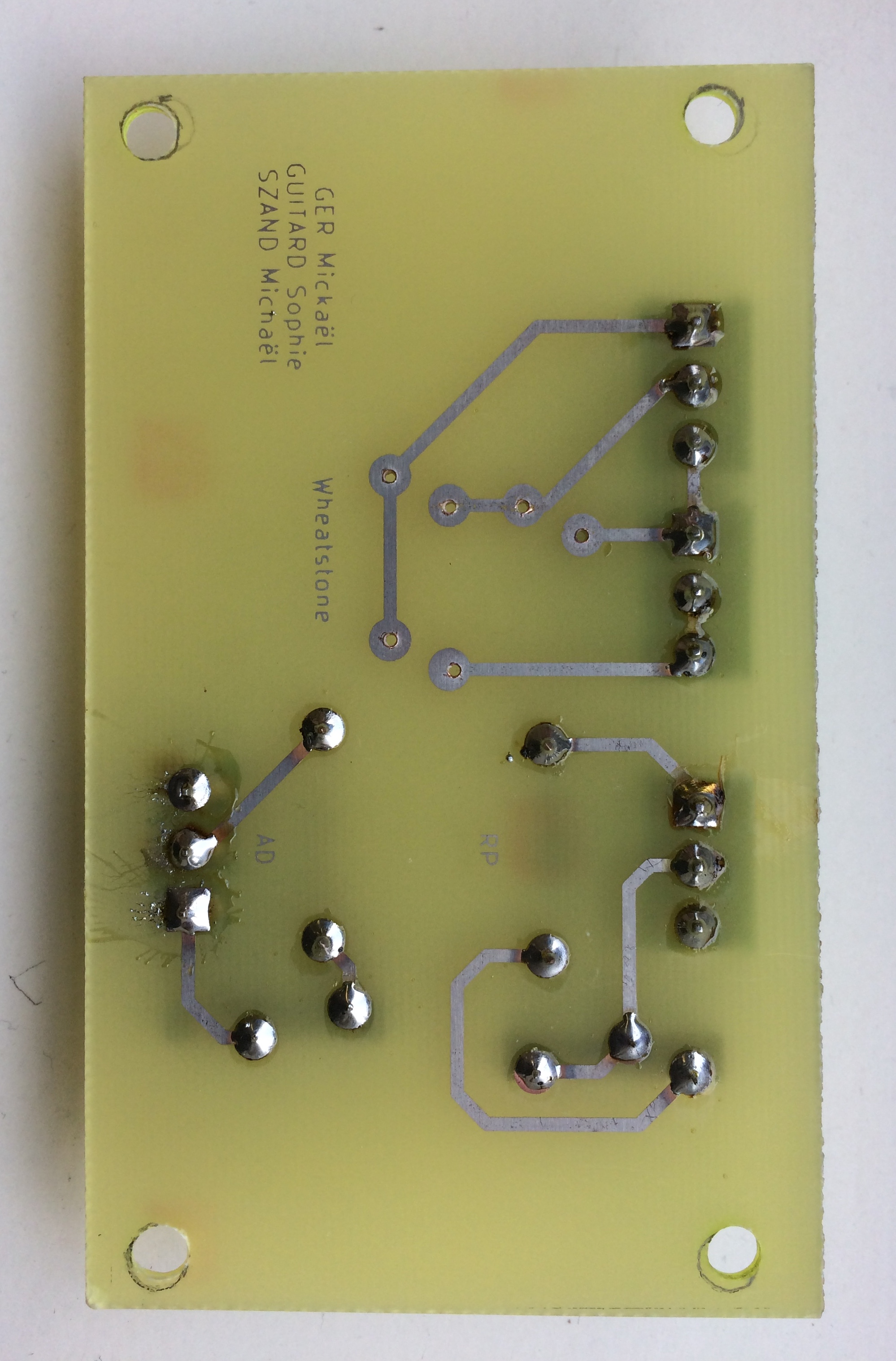
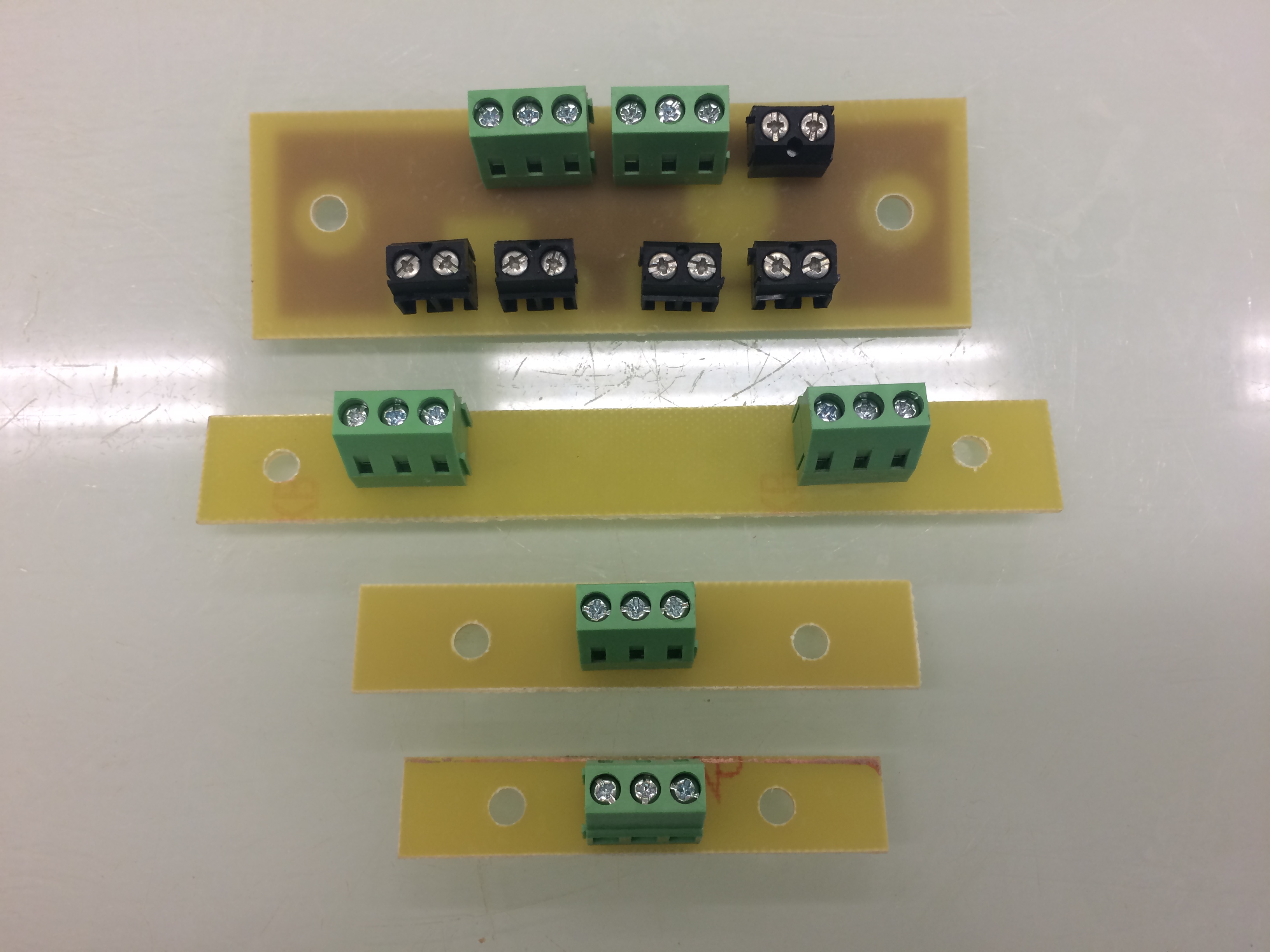
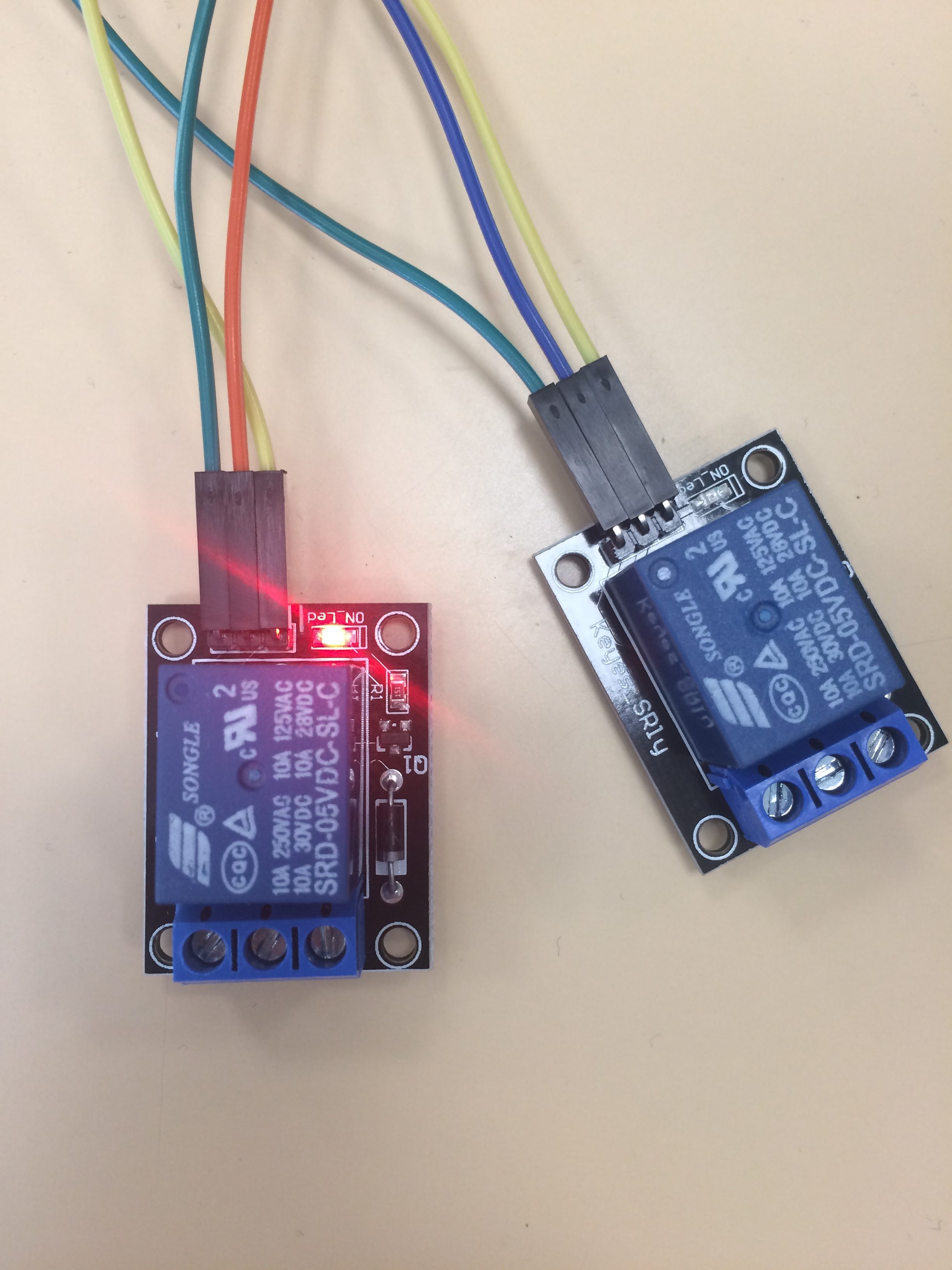
Ci-dessus vous pouvez voir nos premières tentatives pour connecter nos sondes à la carte Arduino.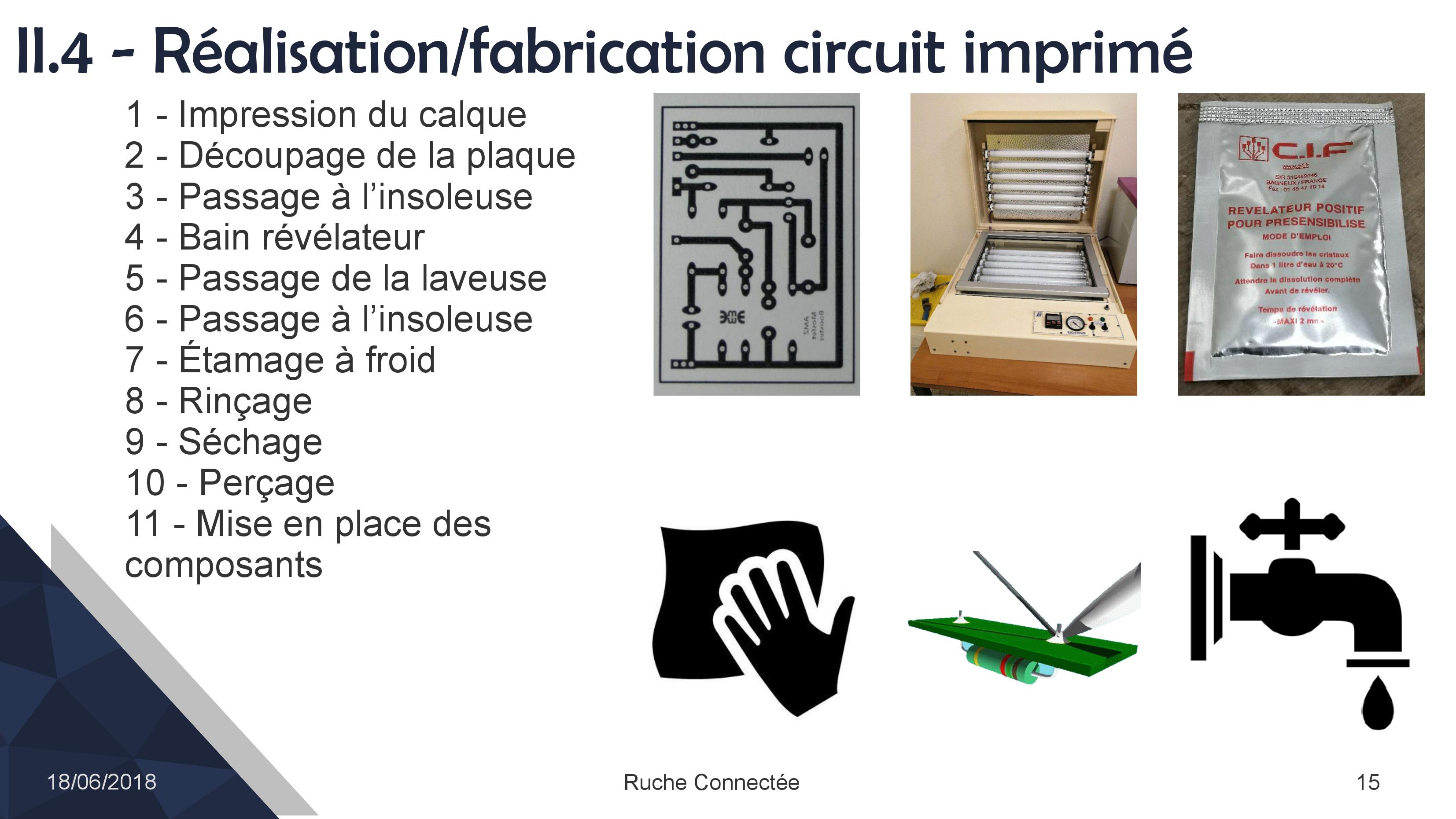 Les diverses étapes nécessaires à la réalisation d’un circuit imprimé.
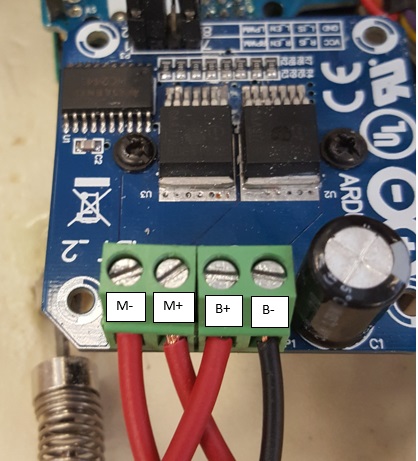
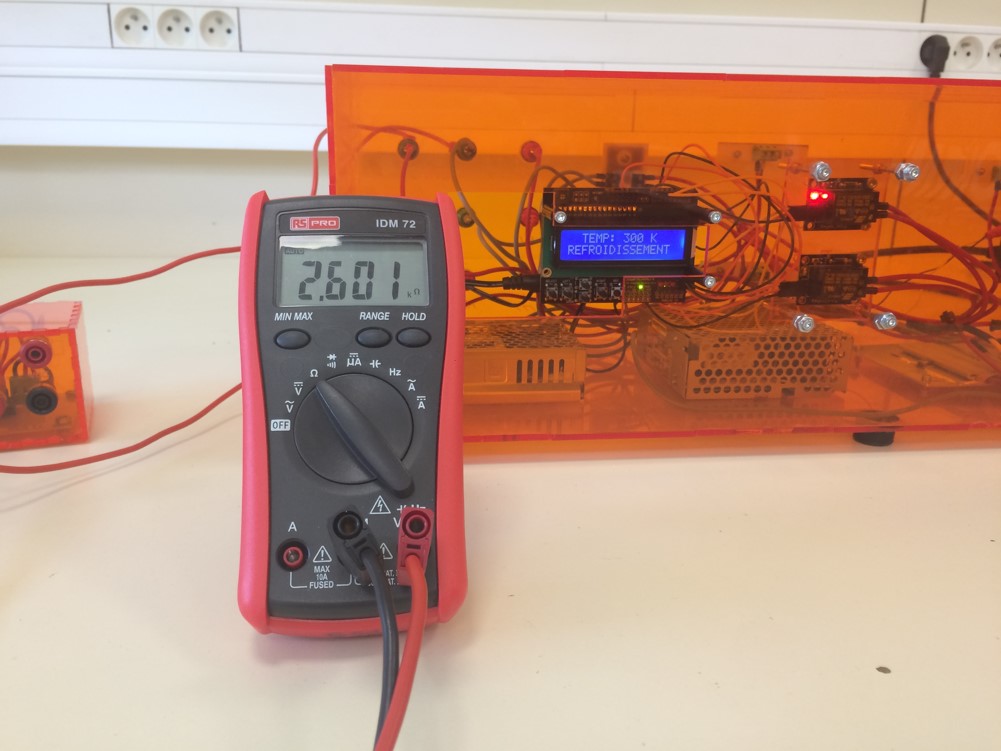
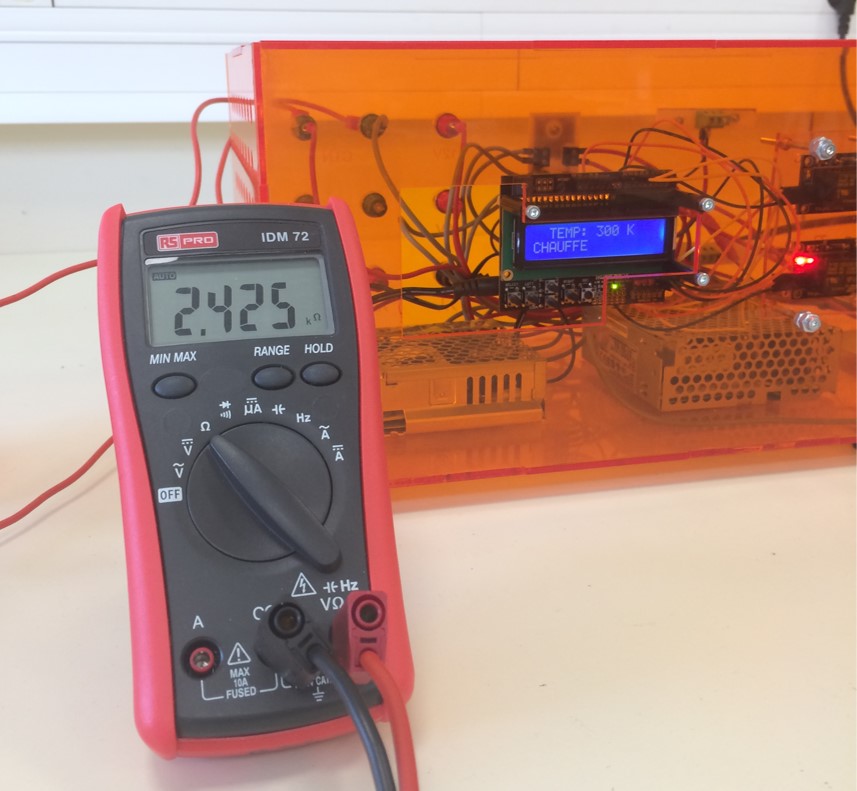
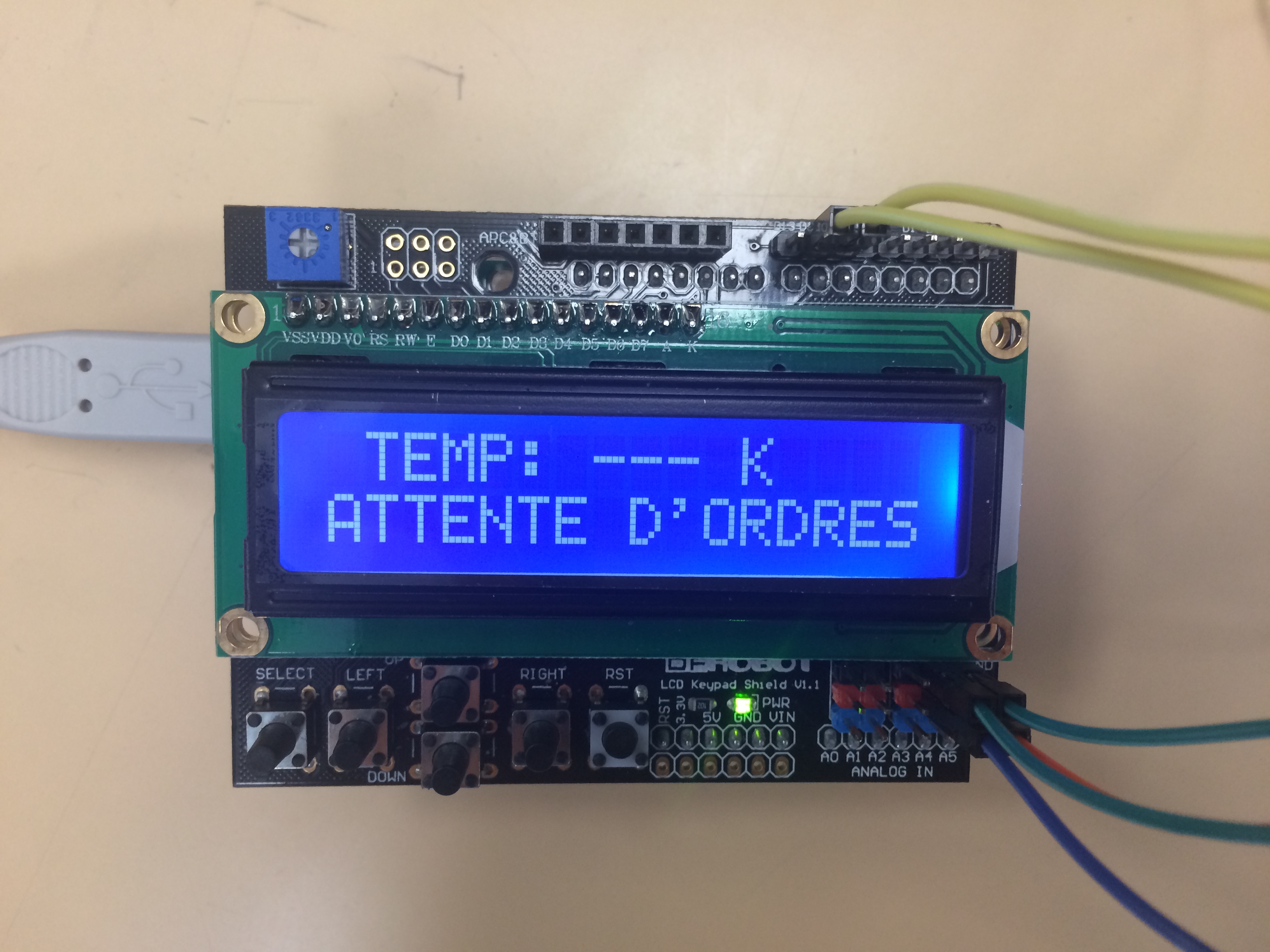
Les diverses étapes nécessaires à la réalisation d’un circuit imprimé.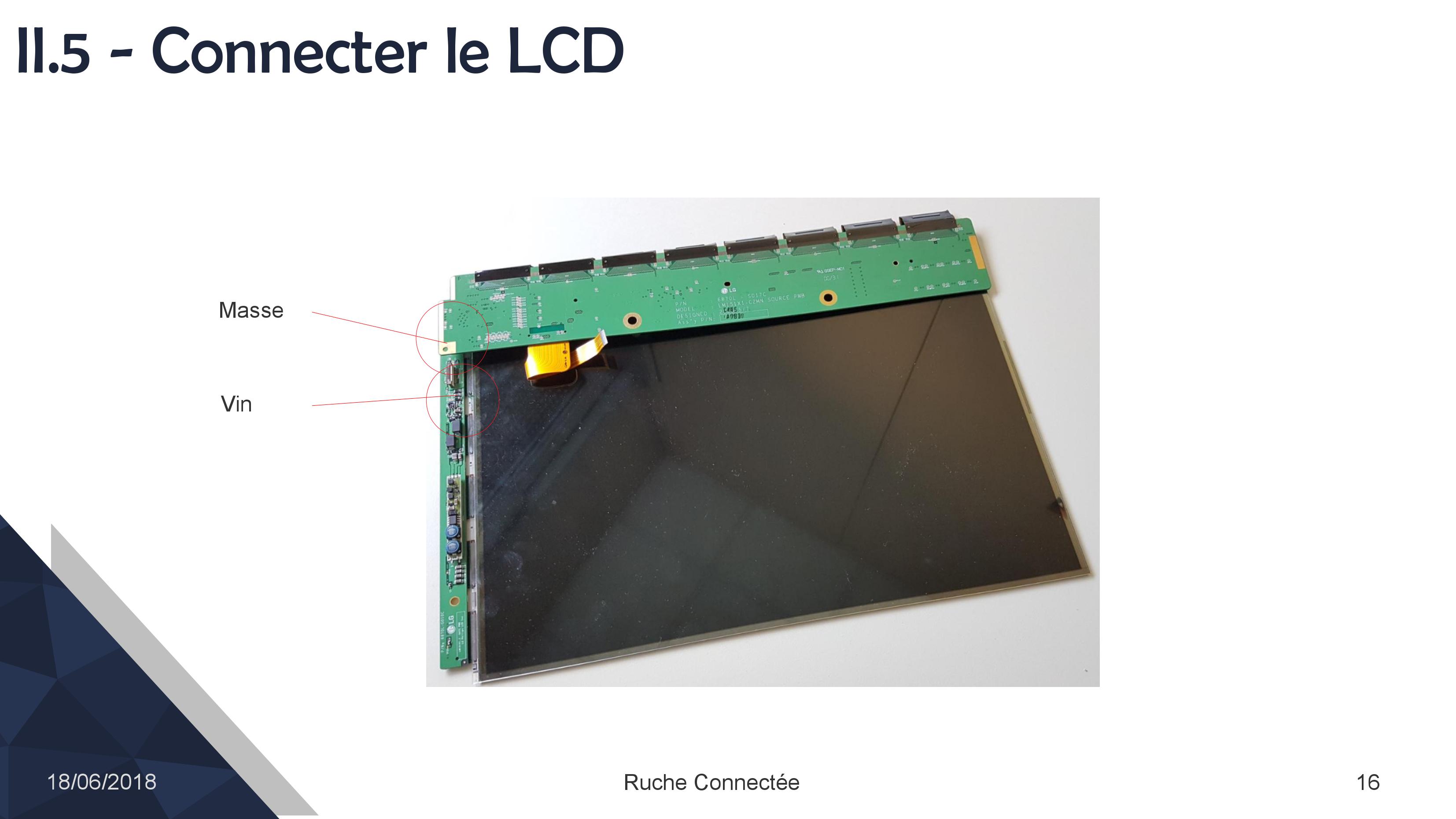 Ci-dessus une photo de notre écran LCD sur laquelle sont annotés le plan de masse ainsi que la pin d’entrée du courant Vin. Nous avons relié ce plan de masse à la masse de notre carte Arduino, ainsi que l’entrée Vin à l’une des pins de sortie de notre carte Arduino.
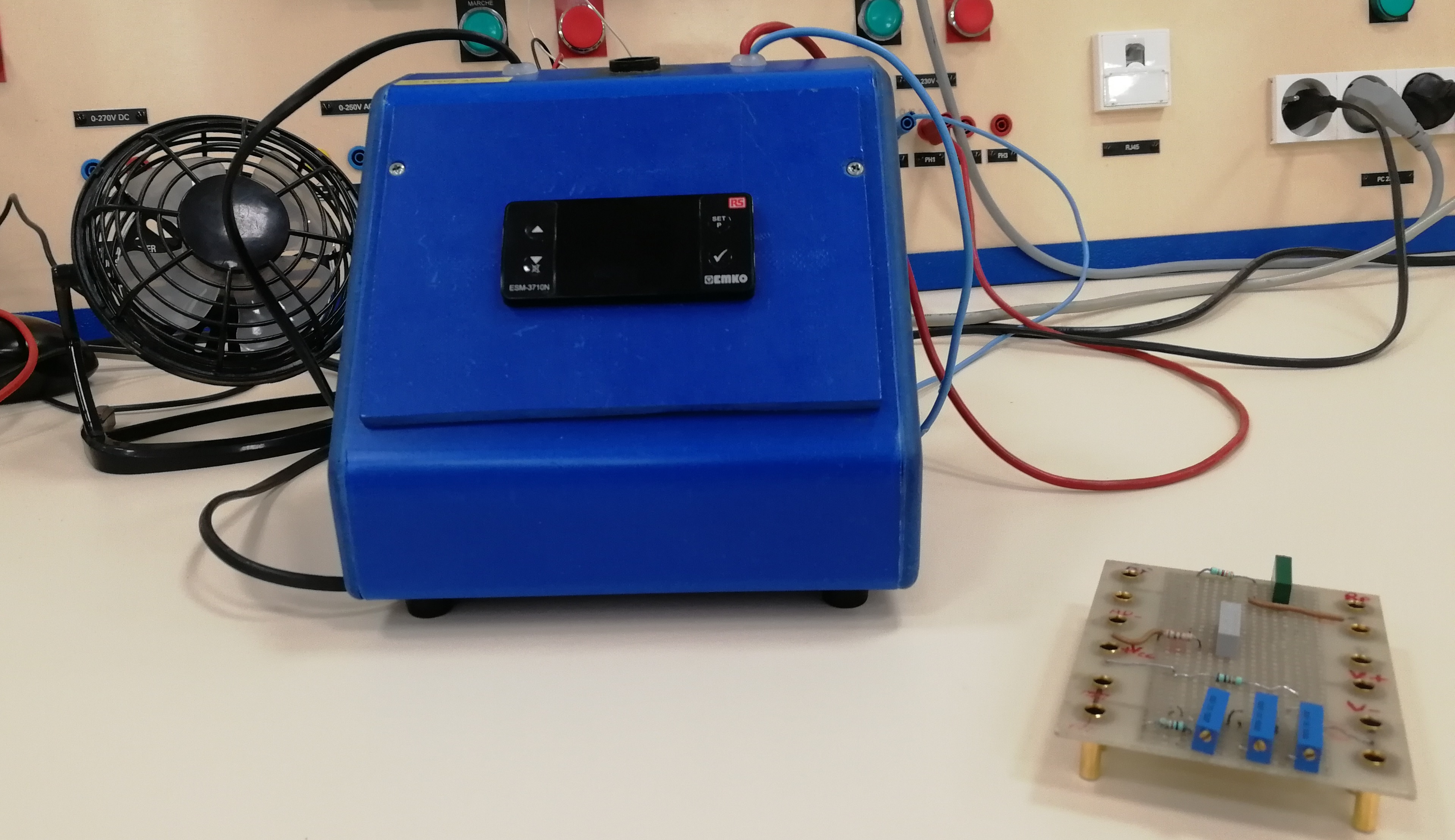
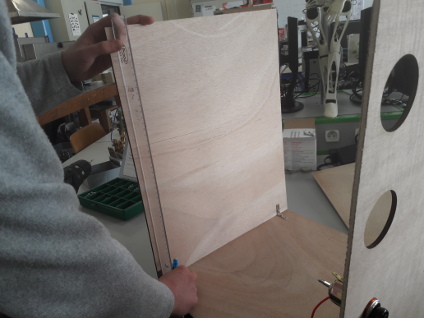
Ci-dessus une photo de notre écran LCD sur laquelle sont annotés le plan de masse ainsi que la pin d’entrée du courant Vin. Nous avons relié ce plan de masse à la masse de notre carte Arduino, ainsi que l’entrée Vin à l’une des pins de sortie de notre carte Arduino.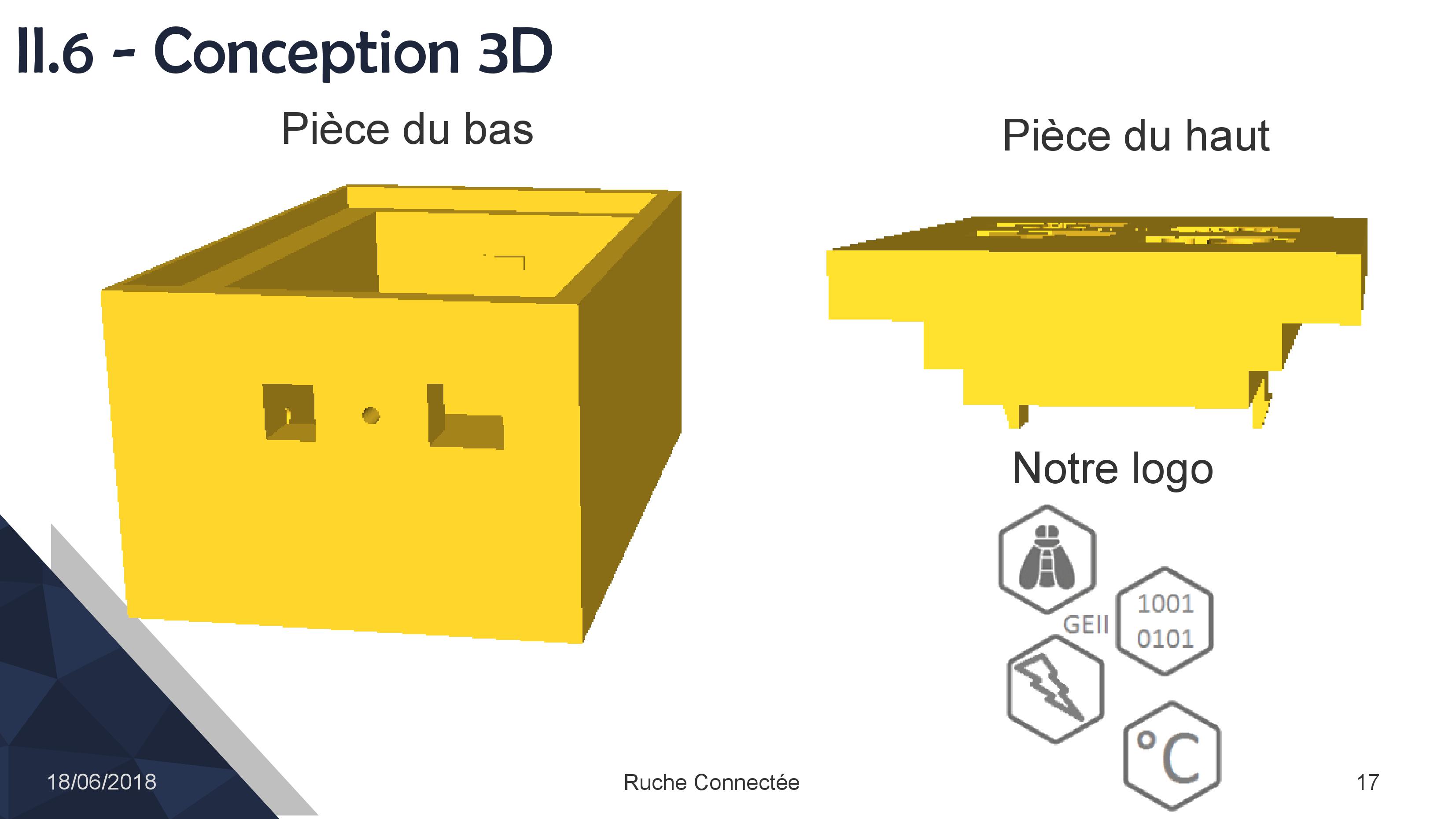 Pour transporter et garder nos composants électronique à l’abri des conditions climatiques, nous avons opté pour une boîte étanche réalisée à l’imprimante 3D.
Pour transporter et garder nos composants électronique à l’abri des conditions climatiques, nous avons opté pour une boîte étanche réalisée à l’imprimante 3D.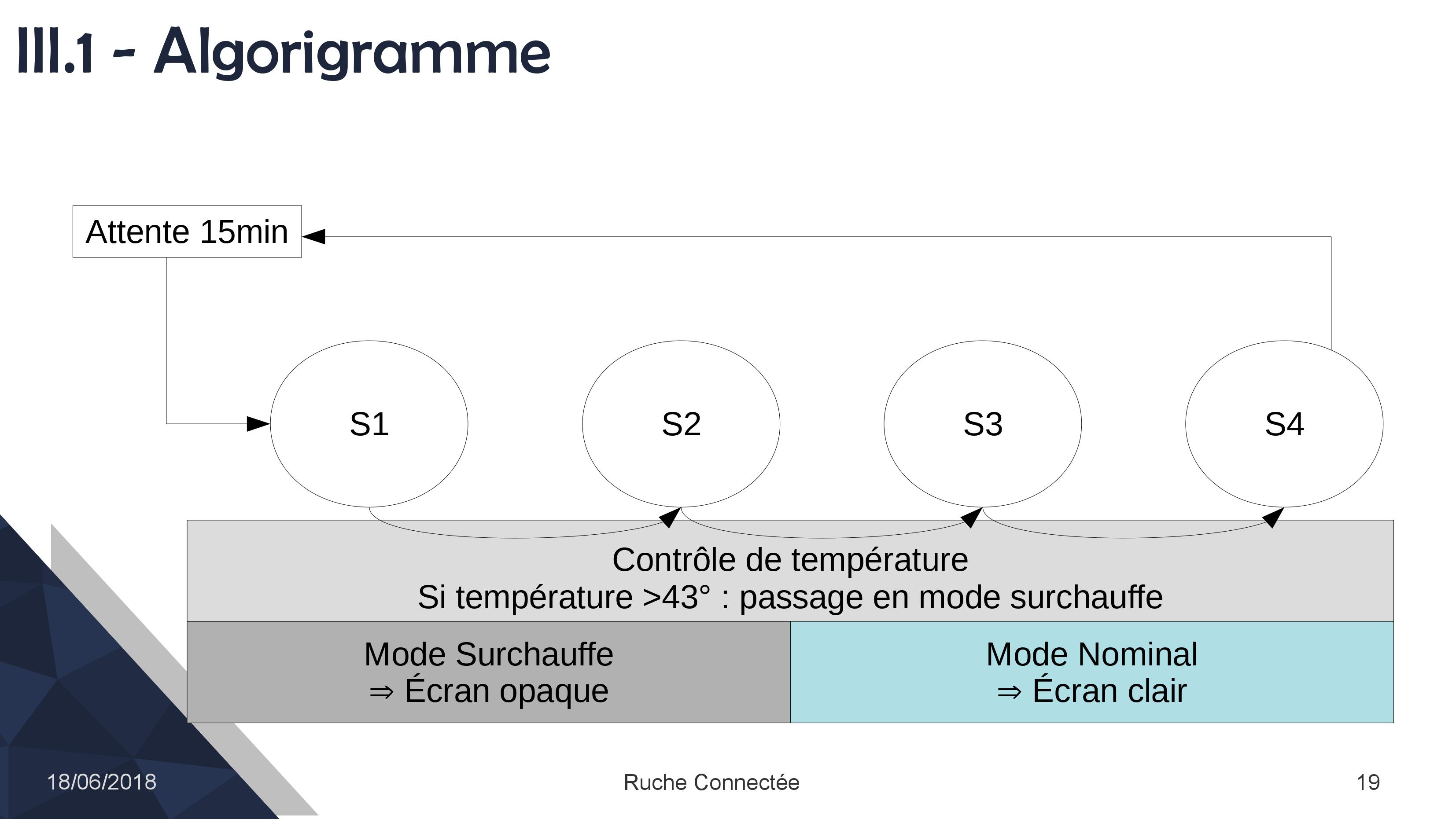 Ci-dessus, vous pouvez voir une représentation schématique de notre programme.
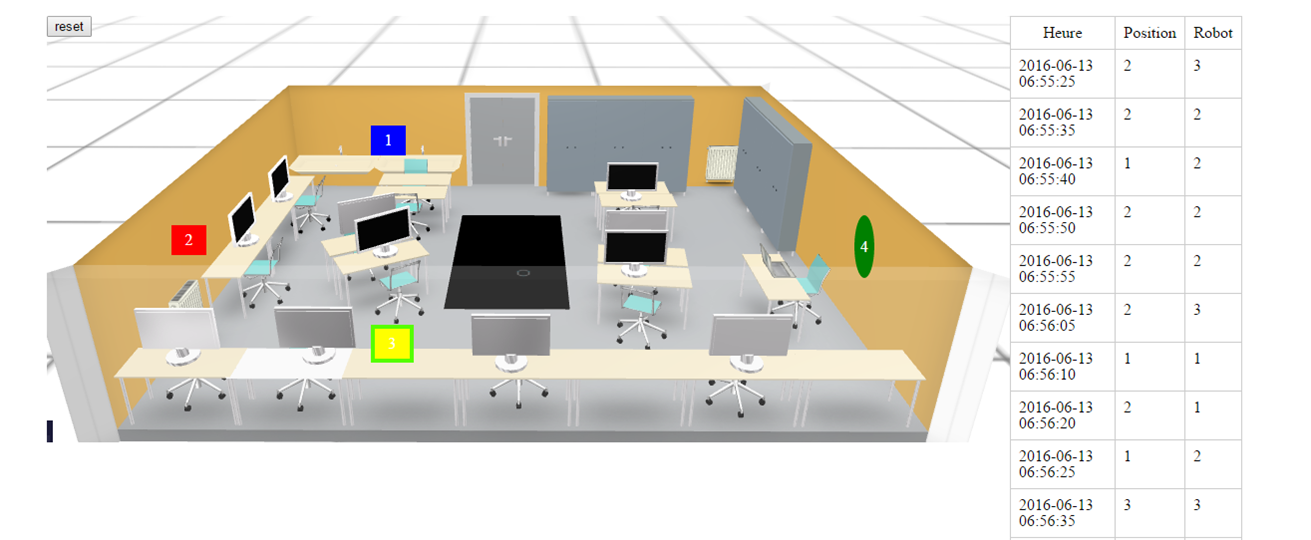
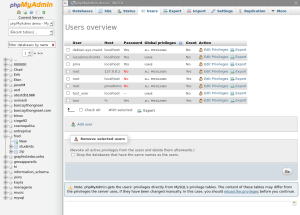
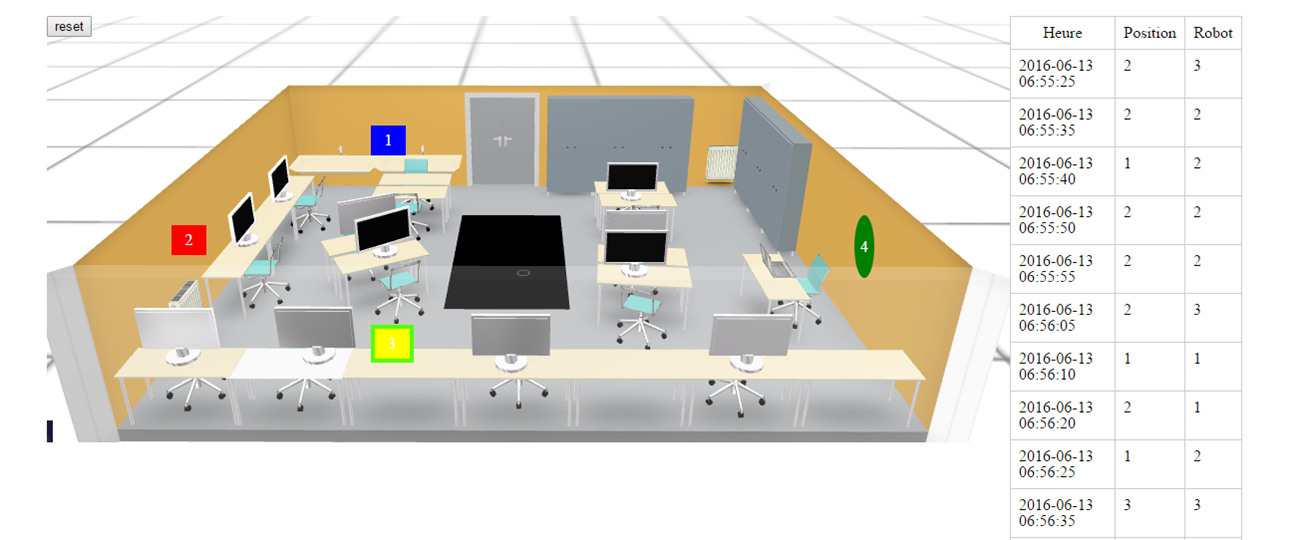
Ci-dessus, vous pouvez voir une représentation schématique de notre programme.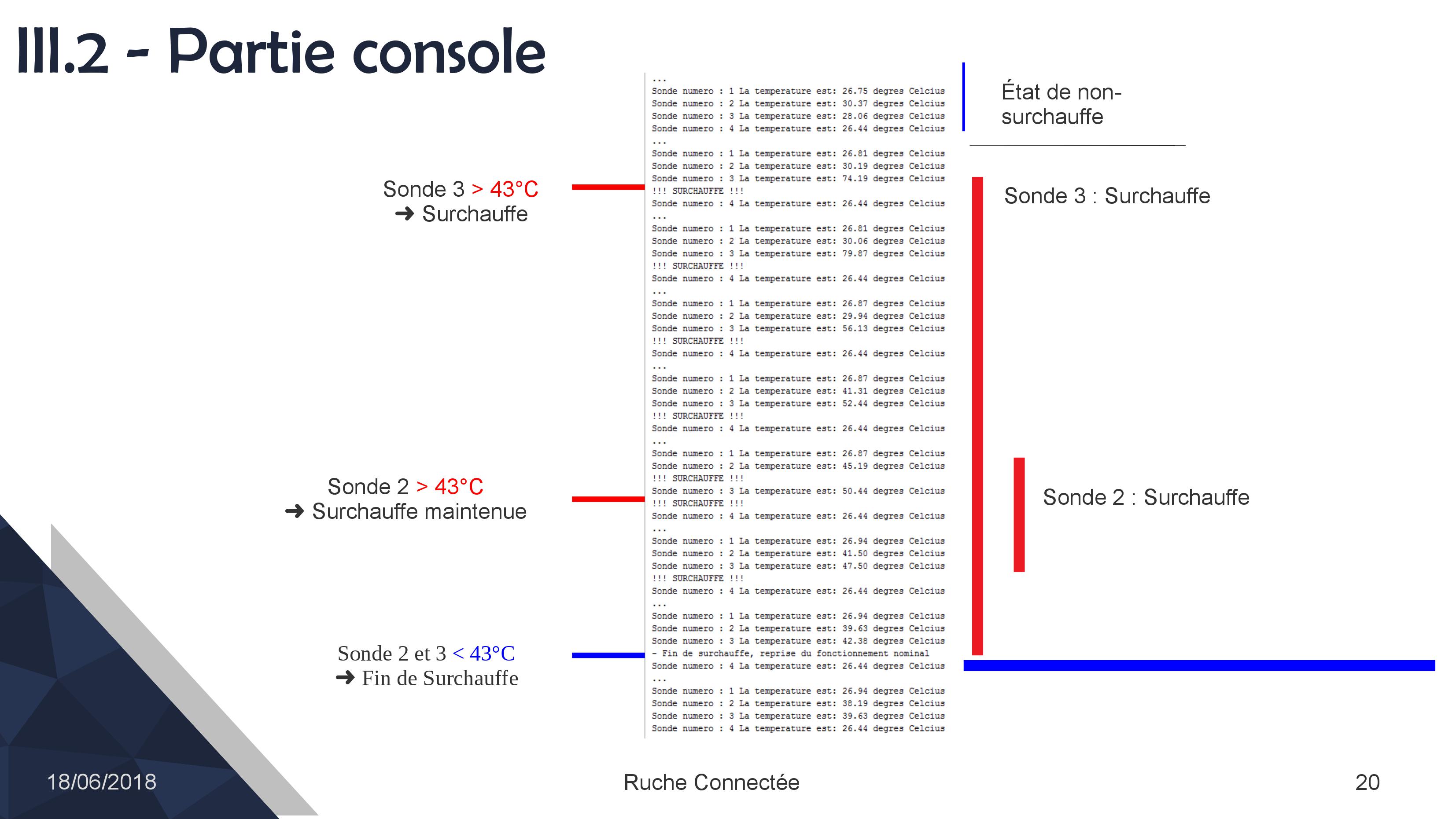 Ci-dessus vous pouvez voir une capture d’écran de la console de notre Raspberry Pi, servant d’interface utilisateur et permettant a l’apiculteur d’observer l’évolution de la température dans la ruche et de consulter un historique des températures.
Ci-dessus vous pouvez voir une capture d’écran de la console de notre Raspberry Pi, servant d’interface utilisateur et permettant a l’apiculteur d’observer l’évolution de la température dans la ruche et de consulter un historique des températures.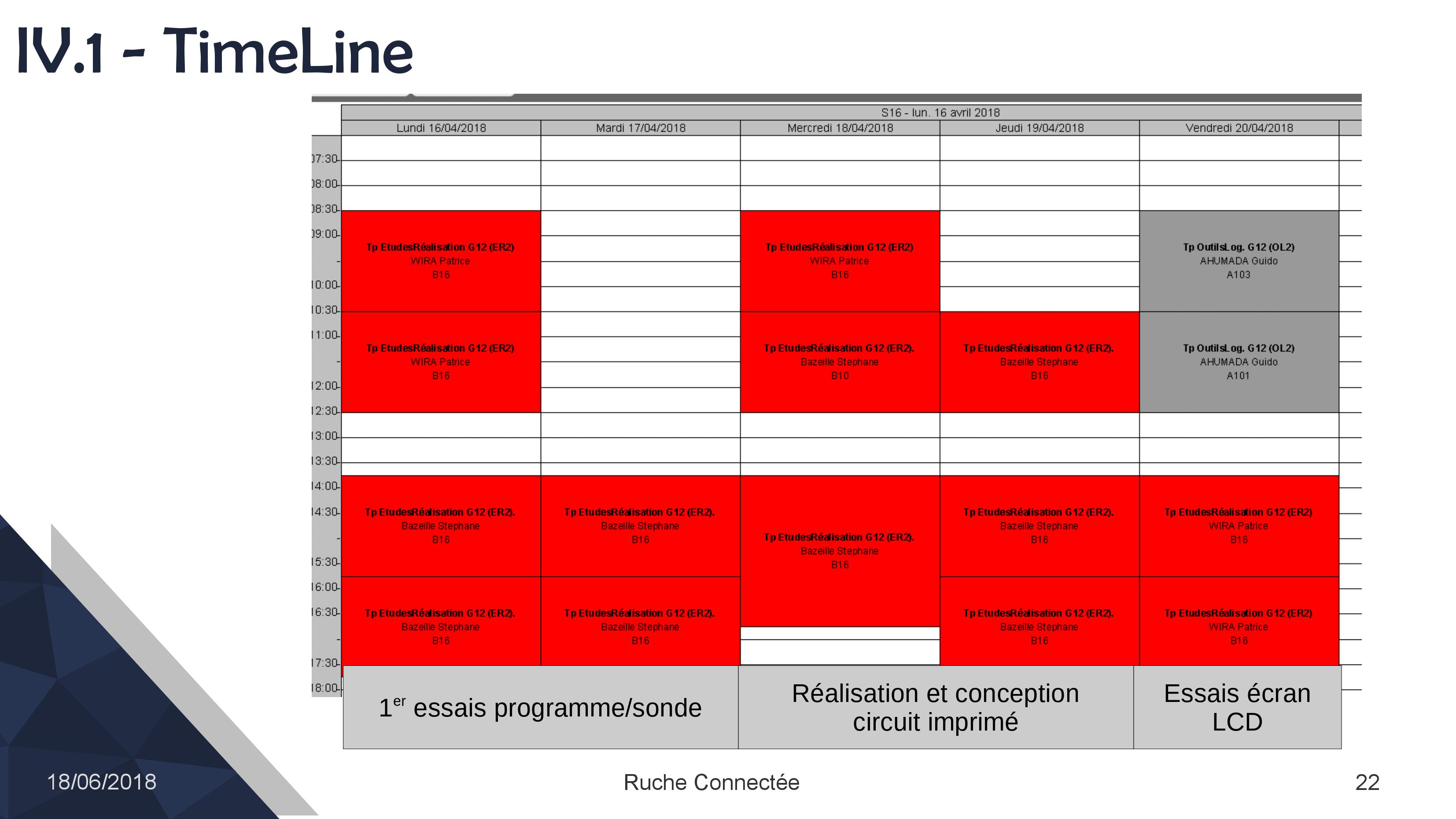
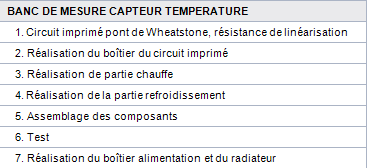
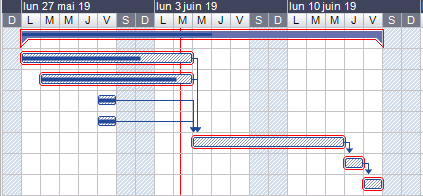
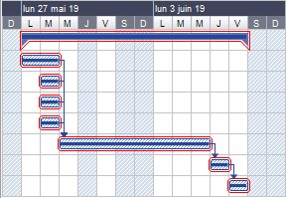
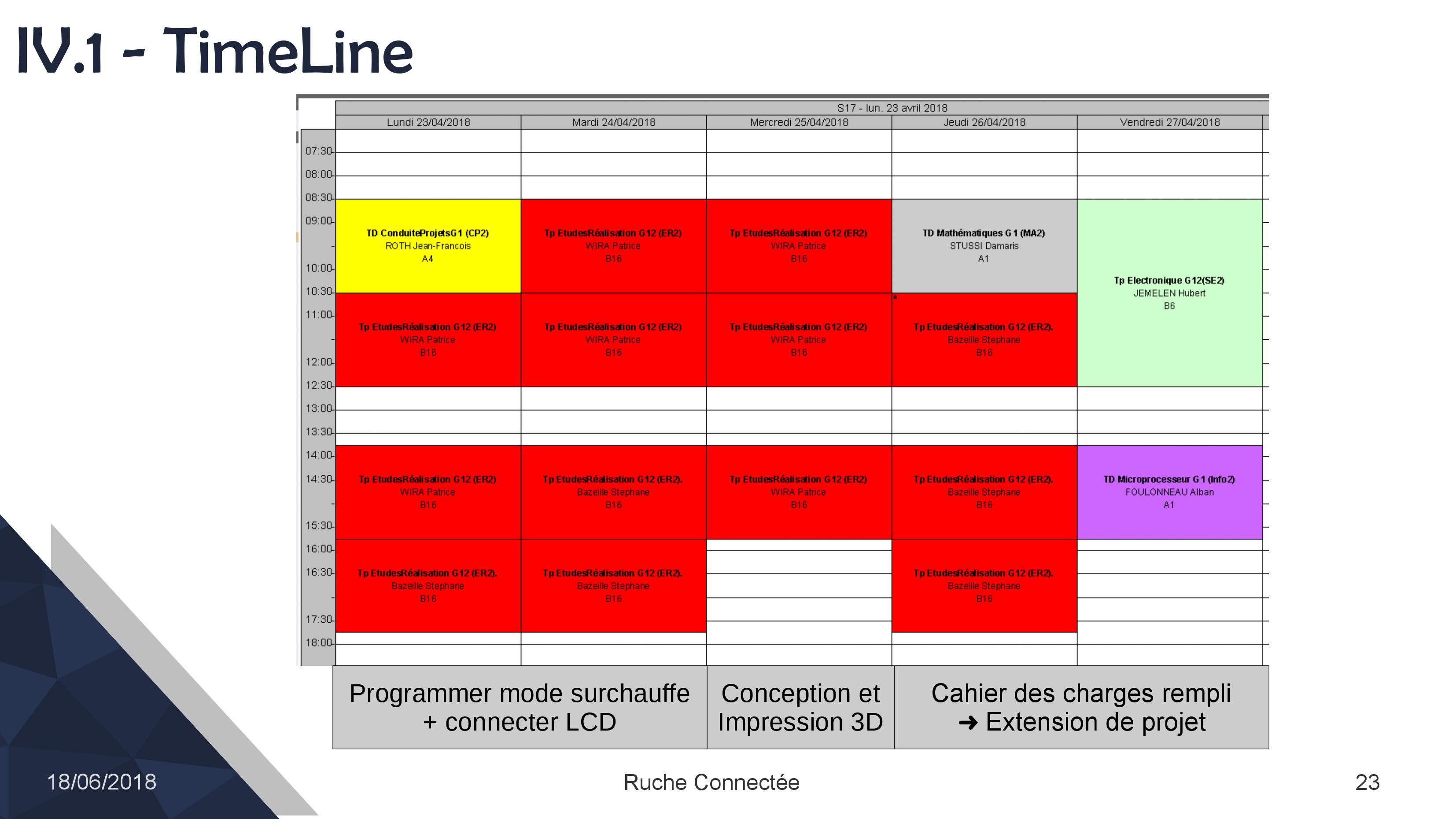 Ci-dessus vous pouvez voir notre emploi du temps pour les deux semaines durant lesquelles ont eu lieu notre projet.
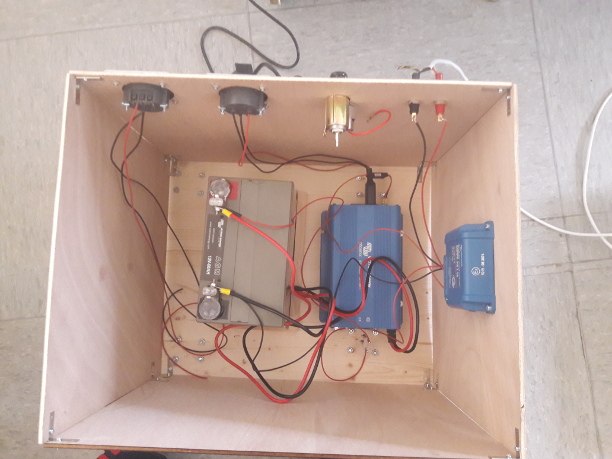
Ci-dessus vous pouvez voir notre emploi du temps pour les deux semaines durant lesquelles ont eu lieu notre projet. Après avoir rempli le cahier des charges de notre projet, nous nous sommes attelés a concevoir et réaliser une alimentation portable pour notre système.
Après avoir rempli le cahier des charges de notre projet, nous nous sommes attelés a concevoir et réaliser une alimentation portable pour notre système. En conclusion, nous sommes plutôt satisfait du travail que nous avons fourni.
En conclusion, nous sommes plutôt satisfait du travail que nous avons fourni.


![images[1]](http://www.projetsgeii.iutmulhouse.uha.fr/wp-content/uploads/2016/03/images1.png)



























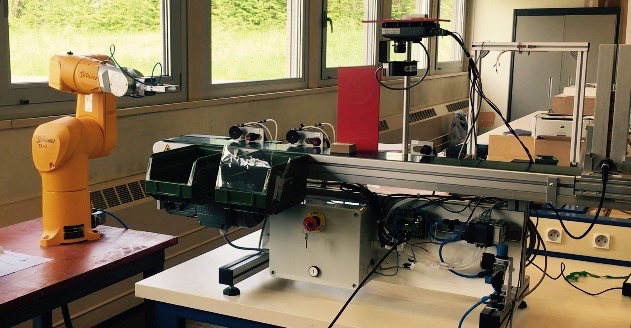
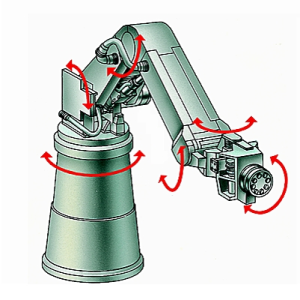
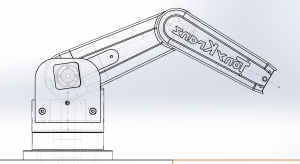
 informatique industrielle à Mulhouse, Alexis ROSENKRANZ et Anthony WELTER. Au début de la deuxième année, nous avions à choisir un projet à réaliser durant celle-ci. Après quelque temps de réflexion, nous avons choisi de réaliser un bras robotisé, projet que notre professeur accepta.
informatique industrielle à Mulhouse, Alexis ROSENKRANZ et Anthony WELTER. Au début de la deuxième année, nous avions à choisir un projet à réaliser durant celle-ci. Après quelque temps de réflexion, nous avons choisi de réaliser un bras robotisé, projet que notre professeur accepta.
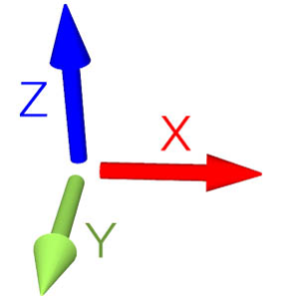
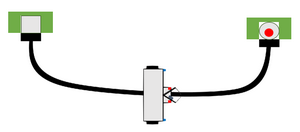
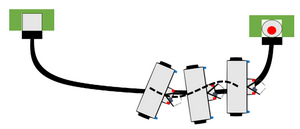
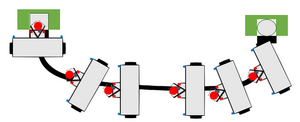
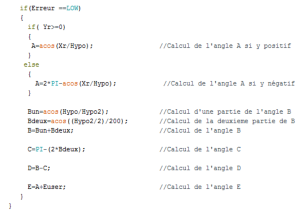
 ment pouvoir gérer en données cartésiennes un bras robotisé 4 axes ?
ment pouvoir gérer en données cartésiennes un bras robotisé 4 axes ?
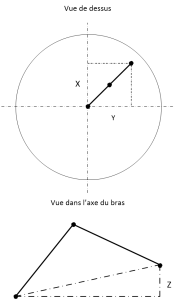 nuse afin de réaliser la conversion entre la position et les angles.
nuse afin de réaliser la conversion entre la position et les angles.
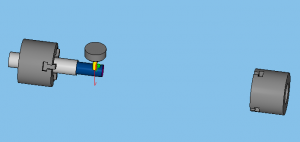
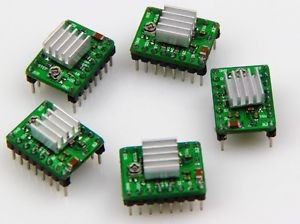 Pour la partie puissance, nous avons choisi d’utiliser des drivers de moteur pas à pas. On envoie dans ces drivers un signal carré ainsi qu’une entrée booléenne pour le sens. C’est-à-dire qu’à chaque fois que l’on envoie un front montant sur l’entrée du driver, il réalise un pas sur le moteur pas à pas dans le sens choisi par l’entrée booléenne.
Pour la partie puissance, nous avons choisi d’utiliser des drivers de moteur pas à pas. On envoie dans ces drivers un signal carré ainsi qu’une entrée booléenne pour le sens. C’est-à-dire qu’à chaque fois que l’on envoie un front montant sur l’entrée du driver, il réalise un pas sur le moteur pas à pas dans le sens choisi par l’entrée booléenne.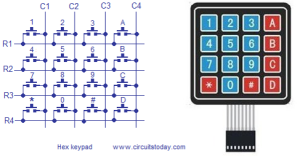 matrice 4×4 pour rentrer les valeurs cartésiennes et de petits joysticks afin de piloter manuellement les coordonnées cartésiennes.
matrice 4×4 pour rentrer les valeurs cartésiennes et de petits joysticks afin de piloter manuellement les coordonnées cartésiennes.

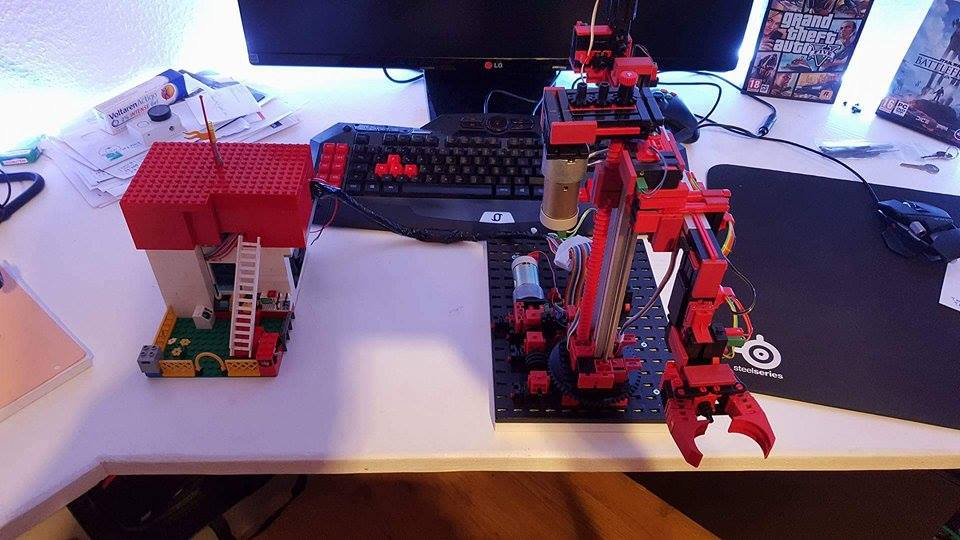
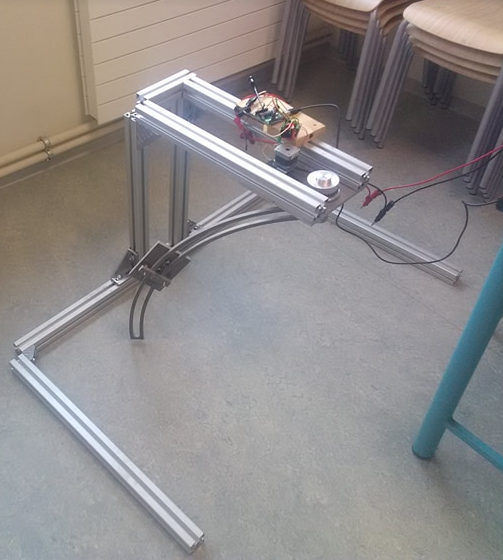
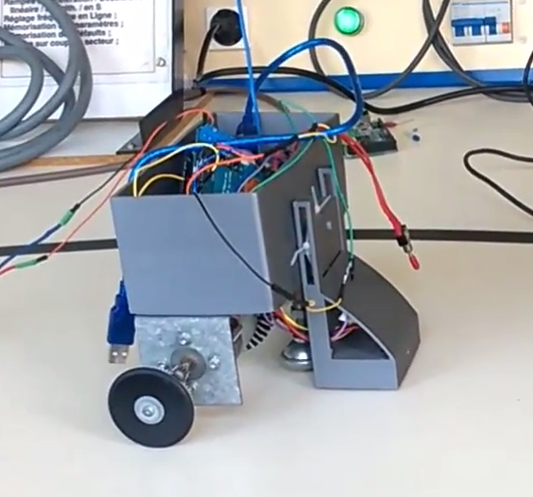
 Possédant personnellement une imprimante 3D, on choisira d’imprimer la plus grande partie des pièces nécessaires.
Possédant personnellement une imprimante 3D, on choisira d’imprimer la plus grande partie des pièces nécessaires.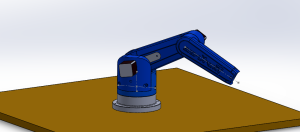
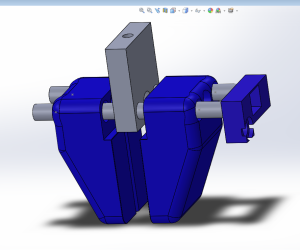
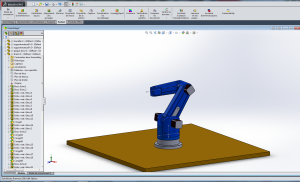

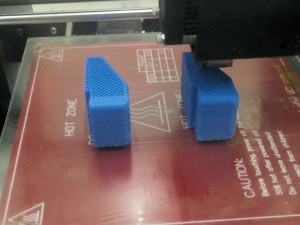 Notre imprimante est une petite imprimante d’entrée de gamme, gérée par un Arduino. Elle fonctionne à l’aide de moteurs pas à pas et courroies. Elle procède un volume d’impression de 200*200*200 ce qui fait que certaines grandes pièces ont du être imprimées en deux fois.
Notre imprimante est une petite imprimante d’entrée de gamme, gérée par un Arduino. Elle fonctionne à l’aide de moteurs pas à pas et courroies. Elle procède un volume d’impression de 200*200*200 ce qui fait que certaines grandes pièces ont du être imprimées en deux fois.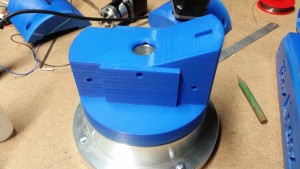




 Par la suite, nous avons géré les temporisations et les vitesses afin d’avoir des mouvements fluides avec différentes positions au moteur pour un certains nombres de points. Nous avons aussi constaté des parasites au niveau de la télécommande constitué du joystick, c’est-à-dire que de temps en temps le robot se déplace légèrement, alors que nous n’avons pas touché au joystick. On pourrait régler la sensibilité des joysticks, mais dans ce cas on aurait plus la possibilité de le déplacer lentement quand on déplace à peine le joystick.
Par la suite, nous avons géré les temporisations et les vitesses afin d’avoir des mouvements fluides avec différentes positions au moteur pour un certains nombres de points. Nous avons aussi constaté des parasites au niveau de la télécommande constitué du joystick, c’est-à-dire que de temps en temps le robot se déplace légèrement, alors que nous n’avons pas touché au joystick. On pourrait régler la sensibilité des joysticks, mais dans ce cas on aurait plus la possibilité de le déplacer lentement quand on déplace à peine le joystick.
 si on veut que la pince se retrouve perpendiculaire à nous. Une fois que l’on appuie sur valider, le robot se dirige vers ces valeurs en ligne droite avec rampe d’accélération et de décélération.
si on veut que la pince se retrouve perpendiculaire à nous. Une fois que l’on appuie sur valider, le robot se dirige vers ces valeurs en ligne droite avec rampe d’accélération et de décélération.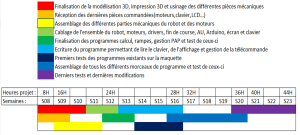
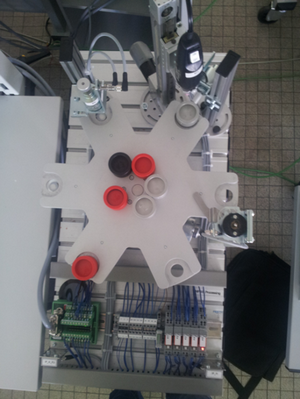
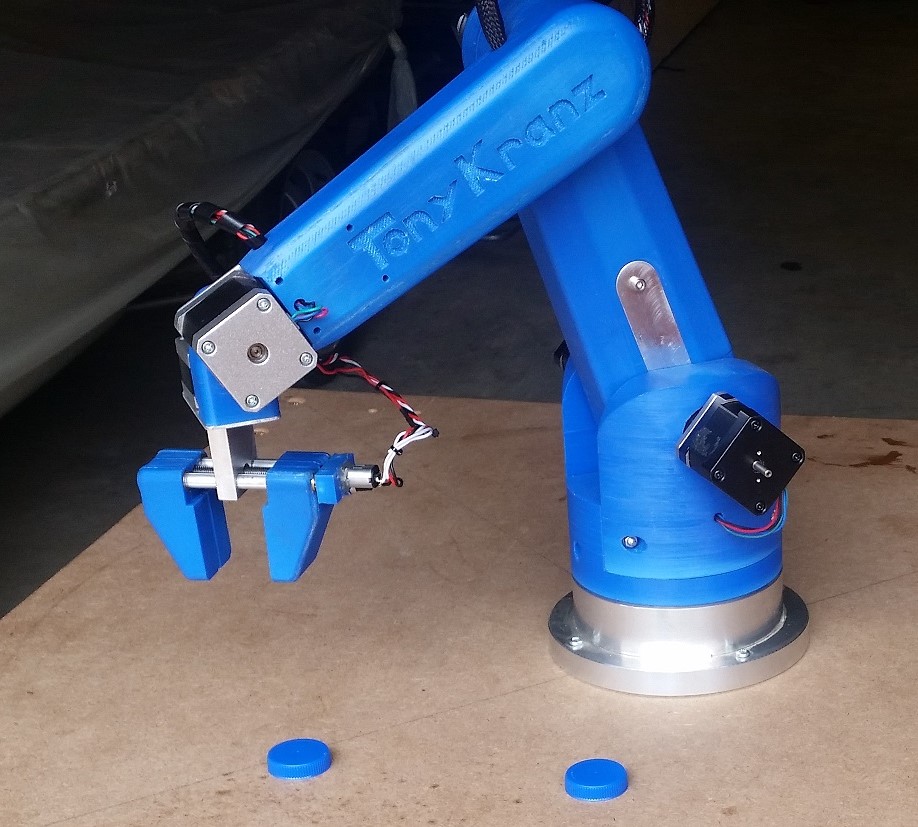
 Le bras robotisé est composé de 4 axes complètement automatisés et nous lui avons rajouté un cinquième axe qui correspond à la rotation du poignet sur un bras humain. Nous utilisons uniquement cet axe afin que la pince soit toujours perpendiculaire au sol. Nous pouvons l’utiliser pour donner un angle à la pince par rapport au sol mais dans ce cas-là, les calculs des angles deviendraient beaucoup plus lourds à réaliser car cela voudrait dire qu’il y aurait plusieurs possibilités d’angles pour la même position. C’est pour cette raison que nous gardons la pince perpendiculaire au sol. Il y a donc une évolution à ce niveau-là pour rendre le robot en 5 axes. Il suffirait de réaliser les calculs nécessaires. Dans cette optique, nous pourrions même le rendre mobile sur 6 axes afin de donner à l’outil une position mais également un angle dans l’espace.
Le bras robotisé est composé de 4 axes complètement automatisés et nous lui avons rajouté un cinquième axe qui correspond à la rotation du poignet sur un bras humain. Nous utilisons uniquement cet axe afin que la pince soit toujours perpendiculaire au sol. Nous pouvons l’utiliser pour donner un angle à la pince par rapport au sol mais dans ce cas-là, les calculs des angles deviendraient beaucoup plus lourds à réaliser car cela voudrait dire qu’il y aurait plusieurs possibilités d’angles pour la même position. C’est pour cette raison que nous gardons la pince perpendiculaire au sol. Il y a donc une évolution à ce niveau-là pour rendre le robot en 5 axes. Il suffirait de réaliser les calculs nécessaires. Dans cette optique, nous pourrions même le rendre mobile sur 6 axes afin de donner à l’outil une position mais également un angle dans l’espace. L’une avec le clavier en rentrant des coordonnées cartésiennes sur X,Y et Z et l’autre, avec la télécommande constituée de deux joysticks pour faire varier directement les coordonnées X,Y et Z. Il y aurait une évolution au niveau de la manière de piloter le robot car on pourrait très bien imaginer pouvoir le piloter à l’aide d’une interface web ou d’autres moyens de communication sans fil.
L’une avec le clavier en rentrant des coordonnées cartésiennes sur X,Y et Z et l’autre, avec la télécommande constituée de deux joysticks pour faire varier directement les coordonnées X,Y et Z. Il y aurait une évolution au niveau de la manière de piloter le robot car on pourrait très bien imaginer pouvoir le piloter à l’aide d’une interface web ou d’autres moyens de communication sans fil.
 Voilà un petit extrait de notre projet, qui vous montre notre implication. On pourrait l’expliquer pendant des heures mais ce n’était pas le but, par conséquence on s’est contenté de vous expliquer les parties les plus intéressantes.
Voilà un petit extrait de notre projet, qui vous montre notre implication. On pourrait l’expliquer pendant des heures mais ce n’était pas le but, par conséquence on s’est contenté de vous expliquer les parties les plus intéressantes.